
ConcurrentHashMap原理详解
参考链接:https://www.cnblogs.com/chengxiao/p/6842045.html
https://www.cnblogs.com/ITtangtang/p/3948786.html
一、背景:
众所周知,哈希表是中非常高效,复杂度为O(1)的数据结构,在Java开发中,我们最常见到最频繁使用的就是HashMap和HashTable,但是在线程竞争激烈的并发场景中使用都不够合理。
HashMap :先说HashMap,HashMap是线程不安全的,在并发环境下,可能会形成环状链表(扩容时可能造成),导致get操作时,cpu空转,所以,在并发环境中使用HashMap是非常危险的。
HashTable : HashTable和HashMap的实现原理几乎一样,差别无非是1.HashTable不允许key和value为null;2.HashTable是线程安全的。但是HashTable线程安全的策略实现代价却太大了,简单粗暴,get/put所有相关操作都是synchronized的,这相当于给整个哈希表加了一把大锁,多线程访问时候,只要有一个线程访问或操作该对象,那其他线程只能阻塞,相当于将所有的操作串行化,在竞争激烈的并发场景中性能就会非常差。
锁分段技术
二、应用场景
三、源码解读
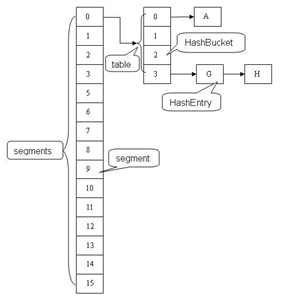
/** * The segments, each of which is a specialized hash table */ final Segment<K,V>[] segments;
不变(Immutable)和易变(Volatile)
static final class HashEntry<K,V> {
final K key;
final int hash;
volatile V value;
final HashEntry<K,V> next;
}
其它
定位操作:
初始化方法有三个参数,如果用户不指定则会使用默认值,initialCapacity为16,loadFactor为0.75(负载因子,扩容时需要参考),concurrentLevel为16。
Segment数组的大小ssize是由concurrentLevel来决定的,但是却不一定等于concurrentLevel,ssize一定是大于或等于concurrentLevel的最小的2的次幂。比如:默认情况下concurrentLevel是16,则ssize为16;若concurrentLevel为14,ssize为16;若concurrentLevel为17,则ssize为32。为什么Segment的数组大小一定是2的次幂?其实主要是便于通过按位与的散列算法来定位Segment的index
segmentShift和segmentMask这两个全局变量的主要作用是用来定位Segment,int j =(hash >>> segmentShift) & segmentMask。
segmentMask:段掩码,假如segments数组长度为16,则段掩码为16-1=15;segments长度为32,段掩码为32-1=31。这样得到的所有bit位都为1,可以更好地保证散列的均匀性
segmentShift:2的sshift次方等于ssize,segmentShift=32-sshift。若segments长度为16,segmentShift=32-4=28;若segments长度为32,segmentShift=32-5=27。而计算得出的hash值最大为32位,无符号右移segmentShift,则意味着只保留高几位(其余位是没用的),然后与段掩码segmentMask位运算来定位Segment。
final Segment<K,V> segmentFor(int hash) {
return segments[(hash >>> segmentShift) & segmentMask];
}
final Segment<K,V> segmentFor(int hash) {
return segments[(hash >>> segmentShift) & segmentMask];
}
数据结构
static final class Segment<K,V> extends ReentrantLock implements Serializable {
/**
* The number of elements in this segment's region.
*/
transient volatileint count;
/**
* Number of updates that alter the size of the table. This is
* used during bulk-read methods to make sure they see a
* consistent snapshot: If modCounts change during a traversal
* of segments computing size or checking containsValue, then
* we might have an inconsistent view of state so (usually)
* must retry.
*/
transient int modCount;
/**
* The table is rehashed when its size exceeds this threshold.
* (The value of this field is always <tt>(int)(capacity *
* loadFactor)</tt>.)
*/
transient int threshold;
/**
* The per-segment table.
*/
transient volatile HashEntry<K,V>[] table;
/**
* The load factor for the hash table. Even though this value
* is same for all segments, it is replicated to avoid needing
* links to outer object.
* @serial
*/
final float loadFactor;
}
删除操作remove(key)
public V remove(Object key) {
hash = hash(key.hashCode());
return segmentFor(hash).remove(key, hash, null);
}
V remove(Object key, int hash, Object value) {
lock();
try {
int c = count - 1;
HashEntry<K,V>[] tab = table;
int index = hash & (tab.length - 1);
HashEntry<K,V> first = tab[index];
HashEntry<K,V> e = first;
while (e != null && (e.hash != hash || !key.equals(e.key)))
e = e.next;
V oldValue = null;
if (e != null) {
V v = e.value;
if (value == null || value.equals(v)) {
oldValue = v;
// All entries following removed node can stay
// in list, but all preceding ones need to be
// cloned.
++modCount;
HashEntry<K,V> newFirst = e.next;
*for (HashEntry<K,V> p = first; p != e; p = p.next)
*newFirst = new HashEntry<K,V>(p.key, p.hash,
newFirst, p.value);
tab[index] = newFirst;
count = c; // write-volatile
}
}
return oldValue;
} finally {
unlock();
}
}


get操作
V get(Object key, int hash) {
if (count != 0) { // read-volatile 当前桶的数据个数是否为0
HashEntry<K,V> e = getFirst(hash); 得到头节点
while (e != null) {
if (e.hash == hash && key.equals(e.key)) {
V v = e.value;
if (v != null)
return v;
return readValueUnderLock(e); // recheck
}
e = e.next;
}
}
returnnull;
}
V readValueUnderLock(HashEntry<K,V> e) {
lock();
try {
return e.value;
} finally {
unlock();
}
}
put操作
V put(K key, int hash, V value, boolean onlyIfAbsent) {
lock();
try {
int c = count;
if (c++ > threshold) // ensure capacity
rehash();
HashEntry<K,V>[] tab = table;
int index = hash & (tab.length - 1);
HashEntry<K,V> first = tab[index];
HashEntry<K,V> e = first;
while (e != null && (e.hash != hash || !key.equals(e.key)))
e = e.next;
V oldValue;
if (e != null) {
oldValue = e.value;
if (!onlyIfAbsent)
e.value = value;
}
else {
oldValue = null;
++modCount;
tab[index] = new HashEntry<K,V>(key, hash, first, value);
count = c; // write-volatile
}
return oldValue;
} finally {
unlock();
}
}
- 是否需要扩容。在插入元素前会先判断Segment里的HashEntry数组是否超过容量(threshold),如果超过阀值,数组进行扩容。值得一提的是,Segment的扩容判断比HashMap更恰当,因为HashMap是在插入元素后判断元素是否已经到达容量的,如果到达了就进行扩容,但是很有可能扩容之后没有新元素插入,这时HashMap就进行了一次无效的扩容。
- 如何扩容。扩容的时候首先会创建一个两倍于原容量的数组,然后将原数组里的元素进行再hash后插入到新的数组里。为了高效ConcurrentHashMap不会对整个容器进行扩容,而只对某个segment进行扩容。
boolean containsKey(Object key, int hash) {
if (count != 0) { // read-volatile
HashEntry<K,V> e = getFirst(hash);
while (e != null) {
if (e.hash == hash && key.equals(e.key))
returntrue;
e = e.next;
}
}
returnfalse;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号