
10种AD采样的软件滤波方法及算法
AD采样点的电压多少有点起伏波动,经运放放大后电压的波动如果超过ADC的分辩率,则显示的值会出现波动。波动如果十分大的话, 建议在硬件上滤波,相反,如果波动较小,你可以用软件滤波方法解决这个问题。
1、限幅滤波法(又称程序判断滤波法)
A、方法:
根据经验判断,确定两次采样允许的最大偏差值(设为A)
每次检测到新值时判断:
如果本次值与上次值之差<=A,则本次值有效
如果本次值与上次值之差>A,则本次值无效,放弃本次值,用上次值代替本次值
B、优点:
能有效克服因偶然因素引起的脉冲干扰
C、缺点
无法抑制那种周期性的干扰
平滑度差
2、中位值滤波法
A、方法:
连续采样N次(N取奇数)
把N次采样值按大小排列
取中间值为本次有效值
B、优点:
能有效克服因偶然因素引起的波动干扰
对温度、液位的变化缓慢的被测参数有良好的滤波效果
C、缺点:
对流量、速度等快速变化的参数不宜
3、算术平均滤波法
A、方法:
连续取N个采样值进行算术平均运算
N值较大时:信号平滑度较高,但灵敏度较低
N值较小时:信号平滑度较低,但灵敏度较高
N值的选取:一般流量,N=12;压力:N=4
B、优点:
适用于对一般具有随机干扰的信号进行滤波
这样信号的特点是有一个平均值,信号在某一数值范围附近上下波动
C、缺点:
对于测量速度较慢或要求数据计算速度较快的实时控制不适用
比较浪费RAM
4、递推平均滤波法(又称滑动平均滤波法)
A、方法:
把连续取N个采样值看成一个队列
队列的长度固定为N
每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据.(先进先出原则)
把队列中的N个数据进行算术平均运算,就可获得新的滤波结果
N值的选取:流量,N=12;压力:N=4;液面,N=4~12;温度,N=1~4
B、优点:
对周期性干扰有良好的抑制作用,平滑度高
适用于高频振荡的系统
C、缺点:
灵敏度低
对偶然出现的脉冲性干扰的抑制作用较差
不易消除由于脉冲干扰所引起的采样值偏差
不适用于脉冲干扰比较严重的场合
比较浪费RAM
5、中位值平均滤波法(又称防脉冲干扰平均滤波法)
A、方法:
相当于“中位值滤波法”+“算术平均滤波法”
连续采样N个数据,去掉一个最大值和一个最小值
然后计算N-2个数据的算术平均值
N值的选取:3~14
B、优点:
融合了两种滤波法的优点
对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差
C、缺点:
测量速度较慢,和算术平均滤波法一样
比较浪费RAM
6、限幅平均滤波法
A、方法:
相当于“限幅滤波法”+“递推平均滤波法”
每次采样到的新数据先进行限幅处理,
再送入队列进行递推平均滤波处理
B、优点:
融合了两种滤波法的优点
对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差
C、缺点:
比较浪费RAM
7、一阶滞后滤波法
A、方法:
取a=0~1
本次滤波结果=(1-a)*本次采样值+a*上次滤波结果
B、优点:
对周期性干扰具有良好的抑制作用
适用于波动频率较高的场合
C、缺点:
相位滞后,灵敏度低
滞后程度取决于a值大小
不能消除滤波频率高于采样频率的1/2的干扰信号
8、加权递推平均滤波法
A、方法:
是对递推平均滤波法的改进,即不同时刻的数据加以不同的权
通常是,越接近现时刻的数据,权取得越大。
给予新采样值的权系数越大,则灵敏度越高,但信号平滑度越低
B、优点:
适用于有较大纯滞后时间常数的对象
和采样周期较短的系统
C、缺点:
对于纯滞后时间常数较小,采样周期较长,变化缓慢的信号
不能迅速反应系统当前所受干扰的严重程度,滤波效果差
9、消抖滤波法
A、方法:
设置一个滤波计数器
将每次采样值与当前有效值比较:
如果采样值=当前有效值,则计数器清零
如果采样值<>当前有效值,则计数器+1,并判断计数器是否>=上限N(溢出)
如果计数器溢出,则将本次值替换当前有效值,并清计数器
B、优点:
对于变化缓慢的被测参数有较好的滤波效果,
可避免在临界值附近控制器的反复开/关跳动或显示器上数值抖动
C、缺点:
对于快速变化的参数不宜
如果在计数器溢出的那一次采样到的值恰好是干扰值,则会将干扰值当作有效值导入系统
10、限幅消抖滤波法
A、方法:
相当于“限幅滤波法”+“消抖滤波法”
先限幅,后消抖
B、优点:
继承了“限幅”和“消抖”的优点
改进了“消抖滤波法”中的某些缺陷,避免将干扰值导入系统
C、缺点:
对于快速变化的参数不宜
|
前面闲来无事,整理了下平时用得比较多的部分MCU滤波算法,当然 代码网上都有,我只是做了一个搬运工,合并了一些算法,整理成模块函数,需要用的时候直接调用就可以。这里简单介绍包含的内容,详细代码和使用说明在附件里。大家可自行查阅。
  AD滤波算法函数模块说明:
一、该模块包含滤波算法有:中位值滤波、中位值平均滤波、递推平均滤波、一阶滞后滤波。用户可根据项目不同情况选用不同的滤波算法。
1.1、中位值滤波:连续采样N次(N取奇数),把N次采样值按大小排列,取中间值为本次有效值。适用范围能有效克服因偶然因素引起的波动干扰,对温度、液位的变化缓慢的被测参数有良好的滤波效果。不过对流量、速度等快速变化的参数不宜。
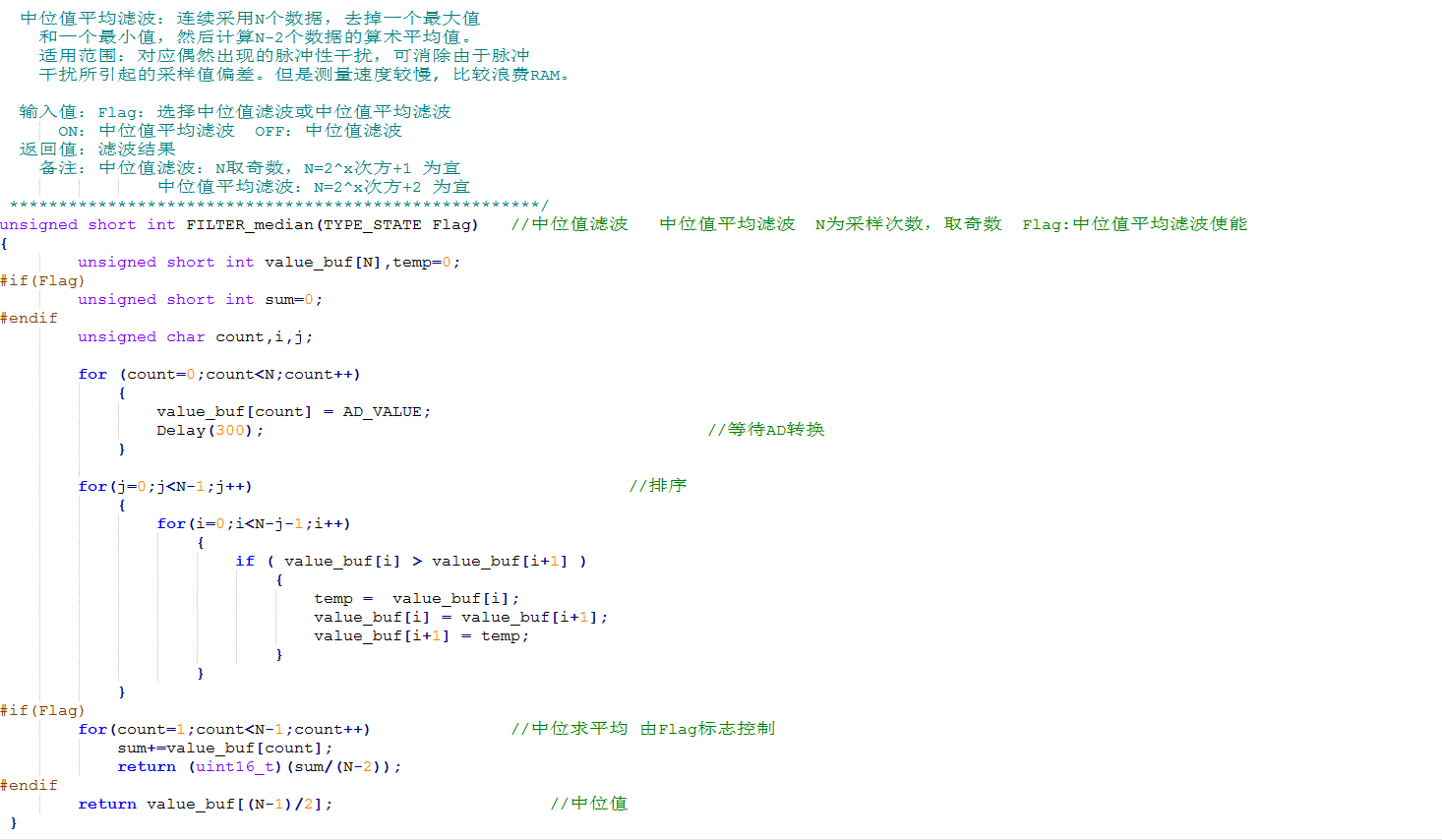
1.2、中位值平均滤波:连续采用N个数据,去掉一个最大值和一个最小值,然后计算N-2个数据的算术平均值。适用范围:对应偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差。但是测量速度较慢, 比较浪费RAM。
1.3递推平均滤波:把连续取N个采样值看成一个队列,队列的长度固定为N,每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据,把队列中得N个数据进行算术平均运算,就可以获得新的滤波结果。
适用范围:对周期性干扰有良好的抑制作用,平滑度高,适用于高频振荡的系统。缺点是灵敏度低,对偶然出现的脉冲性干扰的抑制作用较差,不易消除由于脉冲干扰所引起的采样值偏差,不适用于脉冲干扰比较严重的场合。
1.4、一阶滞后滤波:对周期性干扰具有良好的抑制作用,适用于波动频率较高得场合。缺点就是相位滞后,灵敏度低,滞后程度取决于a的大小,不能消除滤波频率高于采样频率1/21/2的干扰信号。本次滤波结果result=(1-a)*本次采样值+a*上次值。a=(0~1)
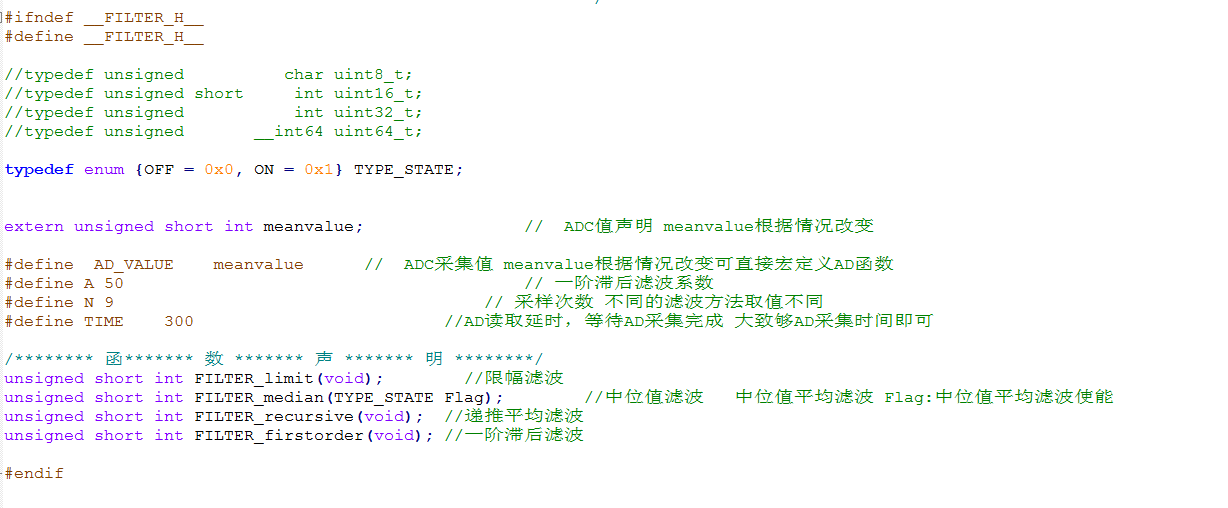
二、滤波函数
2.1、中位值/中位值平均滤波函数
函数名:FILTER_median(TYPE_STATE Flag)
输入值:Flag:选择中位值滤波或中位值平均滤波
ON:中位值平均滤波 OFF:中位值滤波
返回值:滤波结果
2.2、递推平均滤波函数
函数名:FILTER_recursive()
输入值:无
返回值:sum:滤波结果
2.3、一阶滞后滤波函数
函数名:FILTER_firstorder()
输入值:无
返回值:value:滤波结果
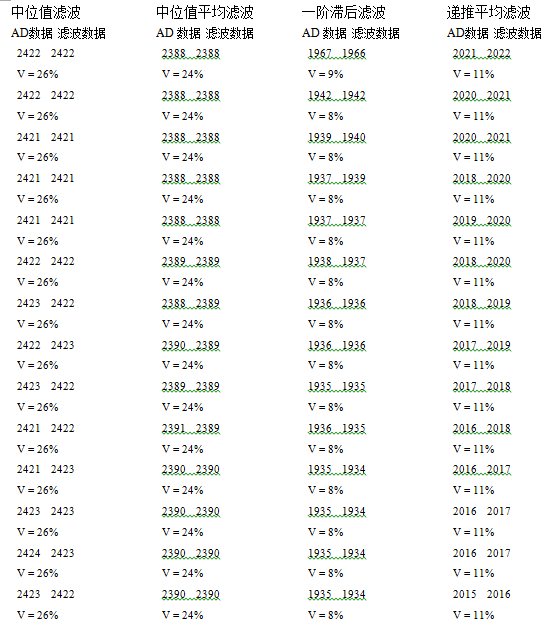
备注:在干电池剩余电量检测中,经过测试对比数据,使用中位值平均滤波算法比较合适。数据整体表现平稳,灵敏度较高,脉冲干扰直接滤除。测试数据如下:
 单片机源程序如下:
|

 浙公网安备 33010602011771号
浙公网安备 33010602011771号