


南京大学 AI 导论 Cart-Pole V1 游戏(强化学习)
19:35 2025.01.25
目的:阐述 DQN 算法原理
Q-learning 算法
bellman 方程
我们想解决一个马尔可夫过程的最优决策问题。
在这个问题中,状态序列是可以无限长的,因此我们定义一个状态序列的价值 \(V\) 为:
这里的 \(R(s_i,a_i,s_{i+1})\) 表示 \(s_i\xrightarrow{a_i} s_{i+1}\) 情况的此步奖励大小。
在这里引入 \(\gamma(\in (0, 1))\) 是为了让越远的未来贡献越低,并且是一定可以收敛的。
此时定义一个动态规划函数 \(Q(s,a)\) 表示在目前处于状态 \(s\) 且选择动作 \(a\) 的期望价值最高是多少,则可以有等式:
即枚举每个可能的后继状态 \(s'\),对应的最大奖励期望 \(E[R|s\xrightarrow{a}s']\) 即为此步奖励 \(R(s,a,s')\) 加上折扣系数 \(\gamma\) 乘以下一步的最优决策 \(\max_{a'}Q(s',a')\)。
学习策略
我们已经拥有了 bellman 方程,且可以证明该方程具有唯一解(若有两个解,可以找到对应的 \(Q(s_0,a_0)\) 不一样,并比较它们的状态序列,价值更低的那个就是错的)。
但是,由于多种原因,例如状态数过多,状态转移不形成 DAG 等多种原因,我们难以使用朴素的动态规划。因此我们采用迭代的方式解出这个方程。
初始令 \(Q(*,*)=0\),然后每次做这个过程 \(Q'(s,a)\leftarrow\sum_{s'}P(s'|s,a)(R(s,a,s')+\gamma\max_{a'}Q(s',a'))\),有数学证明说明这种迭代的收敛效率并不低。
此外,可以引进学习速率参数 \(\alpha\),此时学习过程为:
DQN(Deep Q Network) 算法
上面的方法在状态离散时好用,但是当状态连续的时候,就无法存储每个 \(Q\) 值了。
我们使用深度神经网络解决这个问题。我们希望向神经网络输入 \(s,a\) 后,可以得到一个 \(Q^*(s,a)\),并且 \(|Q(s,a)-Q^*(s,a)|\) 偏差很小,这里 \(Q\) 代表 bellman 方程的真实解。
那么每次执行一个动作时,过程是 \(s\xrightarrow{a}s'\),奖励是 \(r\),因此就使用 \((y-Q(s,a))^2\) 作为损失函数更新神经网络。其中:
那么我们怎么获取这些训练数据呢?考虑直接玩这些游戏,每次有 \(\epsilon\) 的概率随机选择一个随机操作,进行探索;有 \(1-\epsilon\) 的概率选择 \(\arg\max_a Q(s,a)\) 执行当前最优操作。
但是不能每一步 \((s,a,s',r)\) 都进行训练,因为训练数据应当是独立同分布的,因此维护一个经验池,大小为 buffer_size,每次训练从经验池中随机选择一个进行训练。
最后,DQN 算法还维护了两个神经网络,分别存储当前 Q 值和目标 Q 值。
在线 Q 网络 (Online Q-Network):作用: 用于选择动作(通过 \(\epsilon\)-贪心策略)并计算当前的 预测 Q 值 \(Q(s, a; \theta)\)。
更新: 实时通过梯度下降进行更新。
目标 Q 网络 (Target Q-Network):作用: 用于计算目标 Q 值 \(y_i\),这是贝尔曼方程中的参照项。
更新: 延迟更新。它的参数 \(\theta^-\) 每隔 \(C\) 步才从在线网络 \(\theta\) 复制一次。
原因是,当我们更新 \(\theta\) 来让 \(Q(s, a)\) 接近目标值 \(y_i\) 时,目标值 \(y_i\) 本身也同时改变了。这导致 Q 值函数在状态空间中不稳定地振荡或发散,难以收敛。使用目标网络 \(\theta^-\) 延迟更新,暂时固定了目标值 \(y_i\) 的计算,使其在一段时间内保持稳定。这提供了一个稳定的学习目标,极大地提高了算法的稳定性和收敛性。
20:45 2025.12.05
目的:回答以下问题:
main.py 代码中 lr, gamma, buffer_size 三个变量分别有何作用?
agent.py ,act 和 act_no_explore 两个函数有何不同?训练过程中采用act_no_explore函数会有什么问题?
gamma 就是上述的折扣系数,越大代表越重视未来的收益,但收敛也越慢。
buffer_size 是经验池的大小,因为太久之前的经验是根据很久以前的 Q 值决策的,而那个 Q 值不那么准确,决策也没那么明智,比如考虑最开始 Q 是完全随机时候的决策,因此就需要固定经验池大小。
lr 是学习率,决定深度神经网络的学习速率。
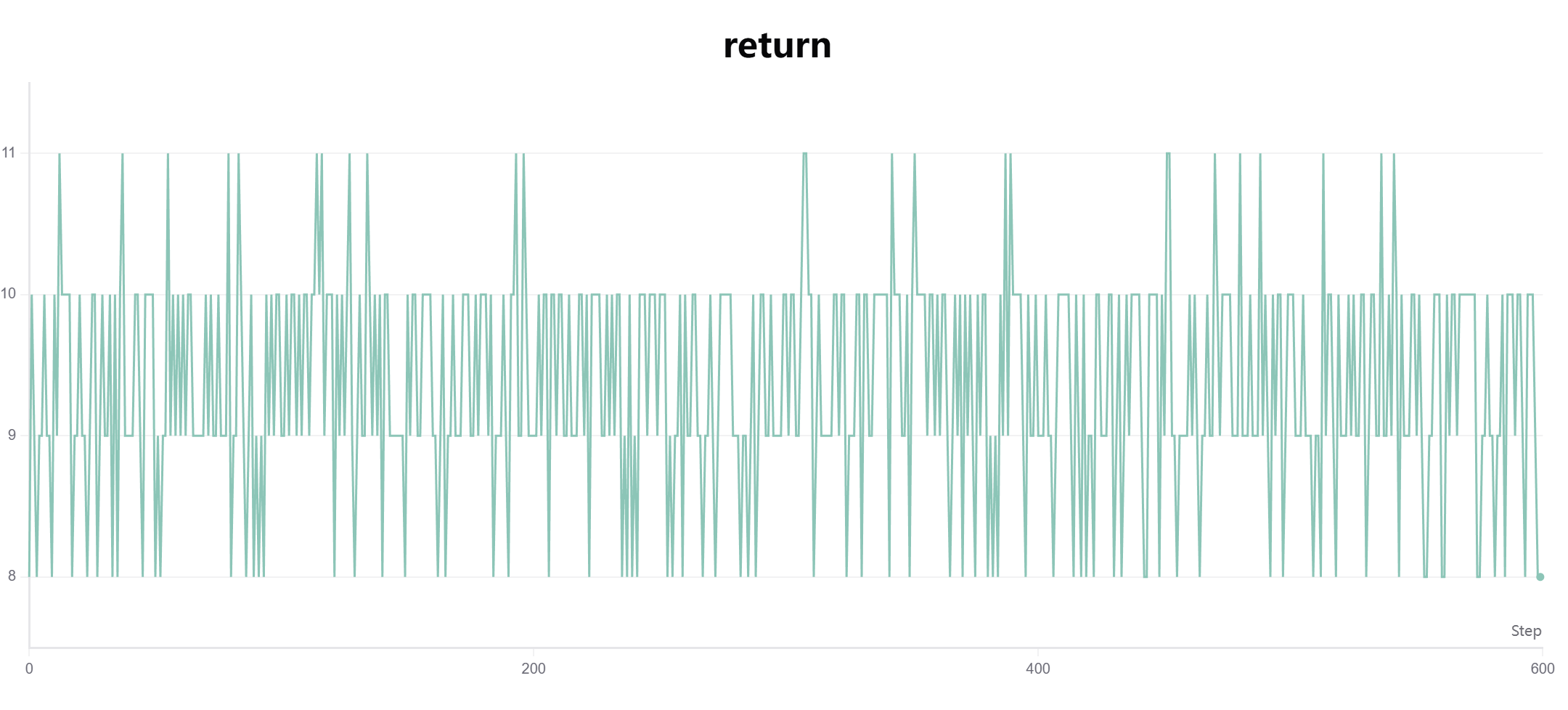
act 是采用了 \(\epsilon\)-贪心 策略,有一定概率探索一个随机的行动,而 act_no_explore 是为了评分设计的,每次一定会采取 Q 最大的行动。
如果在训练过程使用 act_no_explore,则只会走以前的老路子,不断强化错误的观念。实验结果里得分情况极差,最高分只有 11 分(相比之下,正常最高分为得分上限 500 分):
21:26 2025.12.05
目的:尝试调参
主要尝试调整 gamma 和 lr 两个参数

 浙公网安备 33010602011771号
浙公网安备 33010602011771号