
slam(2)---李群、李代数
通过李群——李代数间的转换关系,我们希望把位姿估计变成无约束的优化问题,简化求解方式。
一、群
群( Group)是一种集合加上一种运算的代数结构。记作G = (A; ·),满足一下条件。
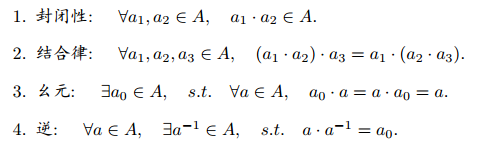

李群是指具有连续(光滑)性质的群
二、李代数
李代数描述了李群的局部性质。李代数由一个集合 V,一个数域 F 和一个二元运算 [;] 组成,称 (V; F;[;]) 为一个李代数,记作 g
满足一下条件:
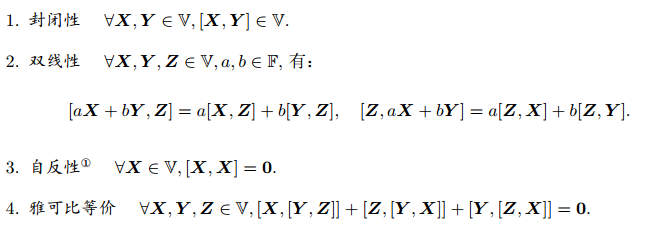
二元运算被称为李括号
三、李代数so(3)
SO(3) 对应的李代数是定义在  上的向量,我们记作 ϕ。每个ϕ都对应一个反对称矩阵。
上的向量,我们记作 ϕ。每个ϕ都对应一个反对称矩阵。

两个向量 ϕ1; ϕ2 的李括号:

可以说,so(3) 的元素是 3 维向量或者 3 维反对称矩阵。

so(3)和SO(3)的关系可以由指数映射表示:
三、李代数se(3)
se(3) 位于  空间中:
空间中:
每个 se(3) 元素记作 ξ,它是一个六维向量。前三维为平移,记作 ρ;后三维为旋转,记作 ϕ,实质上是 so(3) 元素‹。

使用 ^ 符号,将一个六维向量转换成四维矩阵,但这里不再表示反对称:
使用 ^ 和 _ 符号来指代“从向量到矩阵”和“从矩阵到向量”的关系。
李代数 se(3)的李括号:

se(3)和Se(3)的关系可以由指数映射表示:
 =
= 
四、指数与对数映射
1、 SO(3)上的指数映射
so(3)--->SO(3):
ϕ 是三维向量,我们可以定义它的模长和它的方向,分别记作 θ 和 a,于是有 ϕ = θa, a 是一个长度为 1 的方向向量。

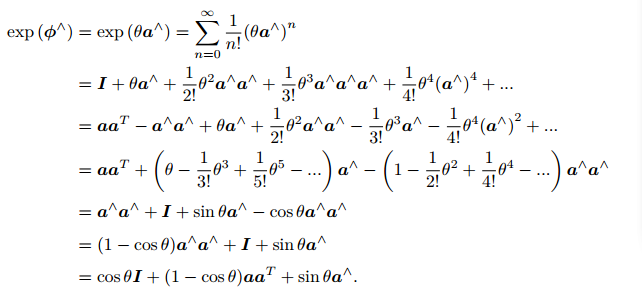
上式就是罗德里格斯公式(旋转向量 ----> 旋转矩阵)。
反之, SO(3)--->so(3):

指数映射只是一个满射。这意味着每个 SO(3) 中的元素,都可以找到一个 so(3) 元素与之对应;
但是可能存在多个 so(3) 中的元 素,对应到同一个 SO(3)。
2、 SE(3)上的指数映射
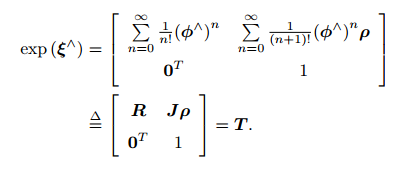
左上角的 R 是SO(3) 中的元素,J 则可整理为(设 ϕ = θa):

平移部分经过指数映射之后, 发生了一次以 J 为系数矩阵的线性变换。
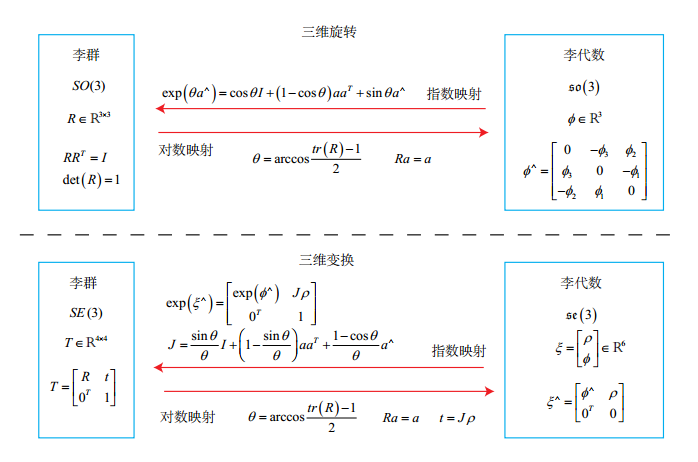
3、SO(3); SE(3); so(3); se(3) 的对应关系
四、李代数求导与扰动模型
1、 BCH (Baker-Campbell-Hausdorff)
两个李代数指数映射乘积的完整形式,有BCH公式刻画。
展开式的前几项: [] 为李括号

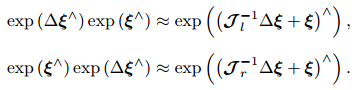
SO(3) 上的李代数 ln(exp(ϕ^ 1) exp(ϕ^ 2))_,当 ϕ1 或 ϕ2 为小量时,BCH近似表达为:

左乘(左乘一个 微小旋转矩阵)为例,左乘 BCH 近似雅可比  。
。


BCH,表达了李群乘法 和 李代数加法的关系。

同理对于SE(3),BCH 近似为:
经常会构建与位姿有关的函数,然后讨论该函数关于位姿的导数,以调整当前的估计值。然而, SO(3); SE(3) 上并没有良好定义的加法,它们
只是群。如果我们把 T 当成一个普通矩阵来处理优化,那就必须对它加以约束。
从李代 数角度来说,由于李代数由向量组成,具有良好的加法运算。因此,使用李代数解决求导 问题的思路分为两种:

2、 李代数求导
以SO(3)为例:


 比较复杂。
比较复杂。
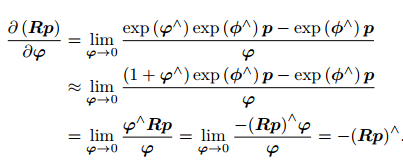
3、扰动模型(左乘)
左扰动 ∆R 对应的李代数为 φ。然后,对 φ 求导:

4、SE(3)上的李代数求导
给 T 左乘一个扰动 ∆T = exp(δξ^),我们设扰动项的李代数为 δξ = [δρ; δϕ]T
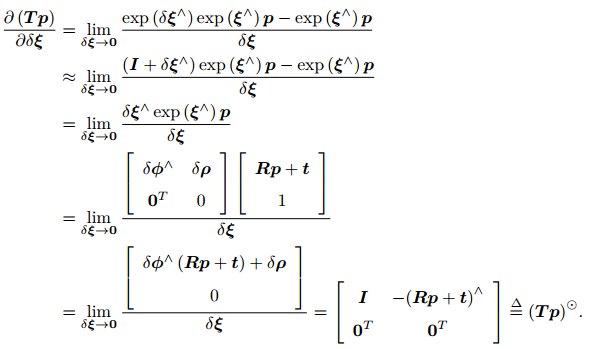
⊙它把一个齐次坐标的空间点变换成一个 4 × 6 的矩阵

 浙公网安备 33010602011771号
浙公网安备 33010602011771号