霍夫变换(直线检测、圆检测)

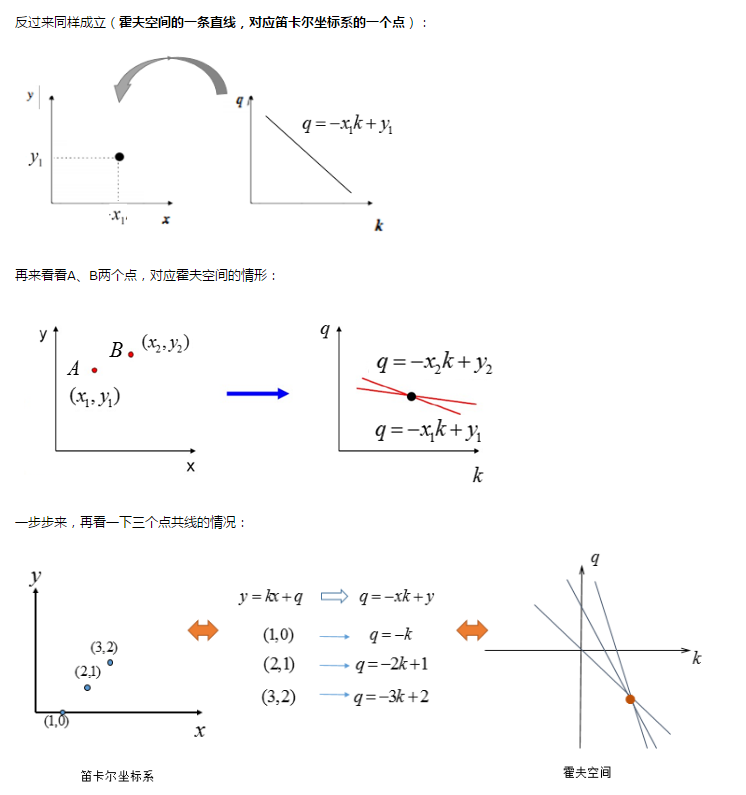
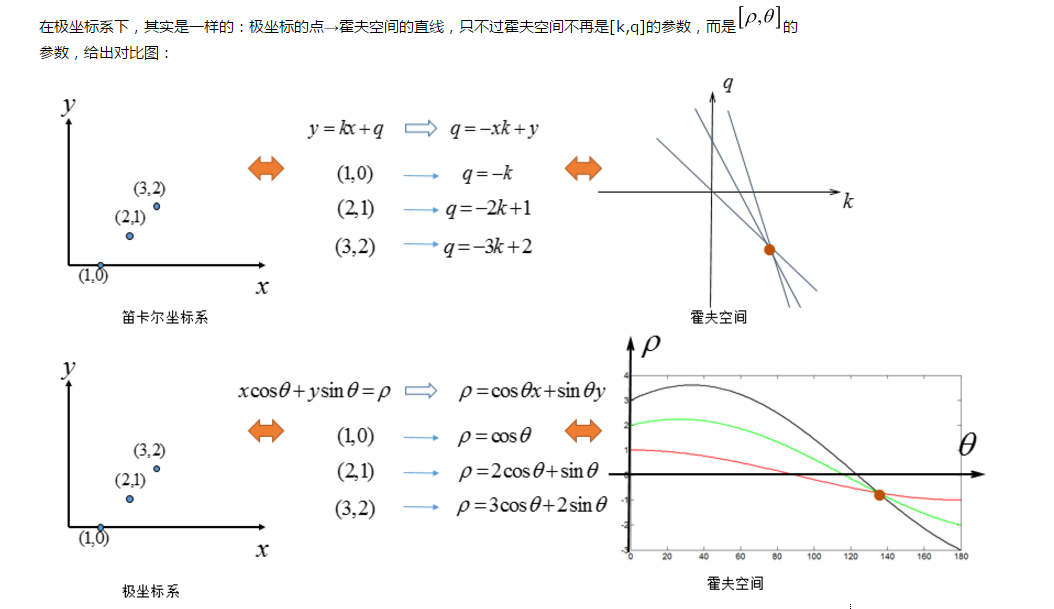
可以看出如果笛卡尔坐标系的点共线,这些点在霍夫空间对应的直线交于一点:这也是必然,共线只有一种取值可能。
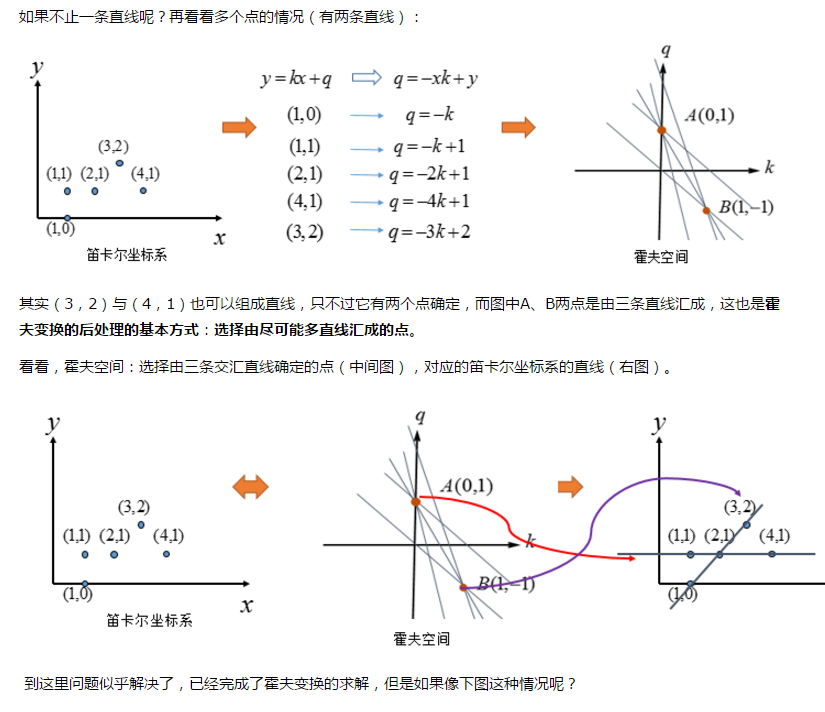
如果不止一条直线呢?再看看多个点的情况(有两条直线):

在opencv中步骤解读:
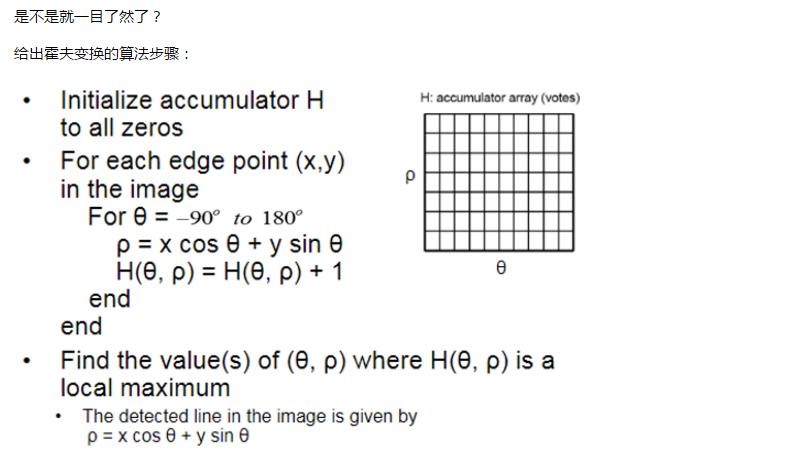
具体步骤:
1. 彩色图像->灰度图
2. 去噪(高斯核)
3. 边缘提取(梯度算子、拉普拉斯算子、canny、sobel)
4. 二值化(判断此处是否为边缘点,就看灰度值==255)
5. 映射到霍夫空间(准备两个容器,一个用来展示hough-space概况,一个数组hough-space用来储存voting的值,因为投票过程往往有某个极大值超过阈值,多达几千,不能直接用灰度图来记录投票信息)
6. 取局部极大值,设定阈值,过滤干扰直线
7. 绘制直线、标定角点
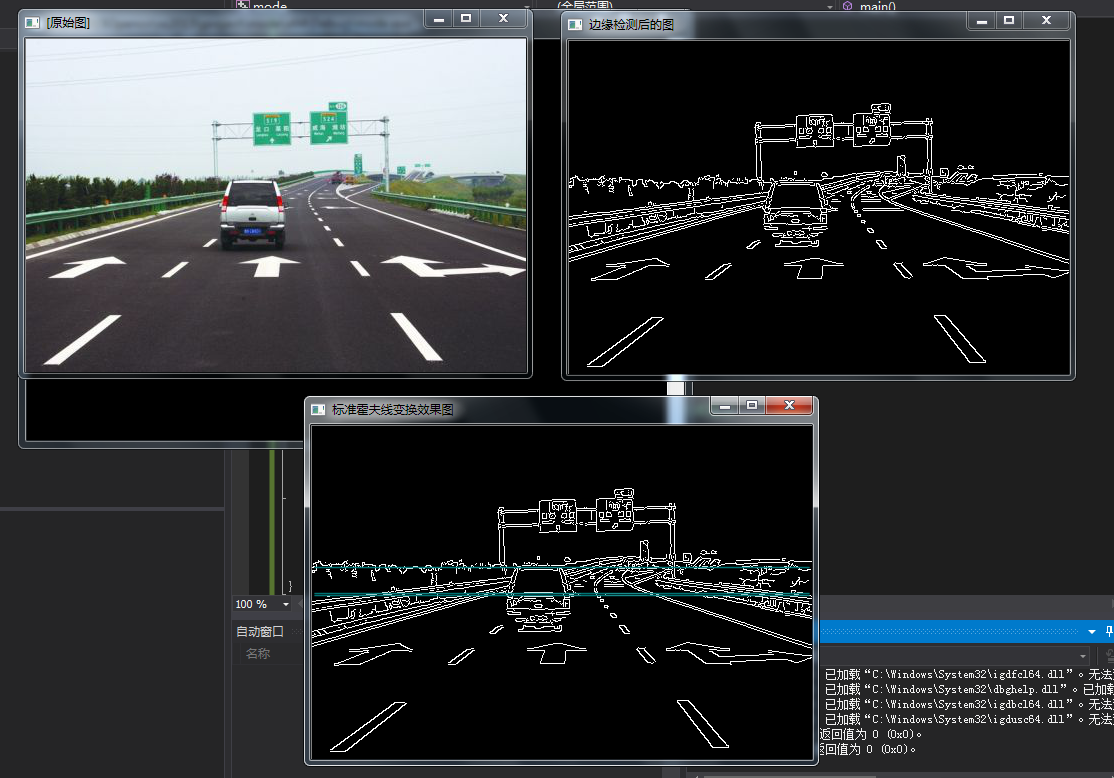
函数HoughLines的实现代码
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/opencv.hpp"
#include <iostream>
using namespace cv;
using namespace std;
using std::cout;
int main()
{
Mat g_srcImage, midImage, dstImage;
namedWindow("[原始图]");
g_srcImage = imread("E:\\VS2015Opencv\\vs2015\\project\\picture\\01.jpg");
if (!g_srcImage.data) { cout << "error read image" << endl; return 0; }
imshow("[原始图]", g_srcImage);
Canny(g_srcImage, midImage, 50, 200, 3);
cvtColor(midImage, dstImage, CV_GRAY2BGR);
vector<Vec2f> lines;
HoughLines(midImage, lines, 0.5, CV_PI / 18, 150, 0, 0);
for (size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0], theta = lines[i][1];
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
pt1.x = cvRound(x0 + 2000 * (-b)); //把浮点数转化成整数
pt1.y = cvRound(y0 + 2000 * (a));
pt2.x = cvRound(x0 - 2000 * (-b));
pt2.y = cvRound(y0 - 2000 * (a));
line(dstImage, pt1, pt2, Scalar(128, 128, 0), 1, CV_AA);
}
imshow("边缘检测后的图", midImage);
imshow("标准霍夫线变换效果图", dstImage);
waitKey(0);
return 0;
}
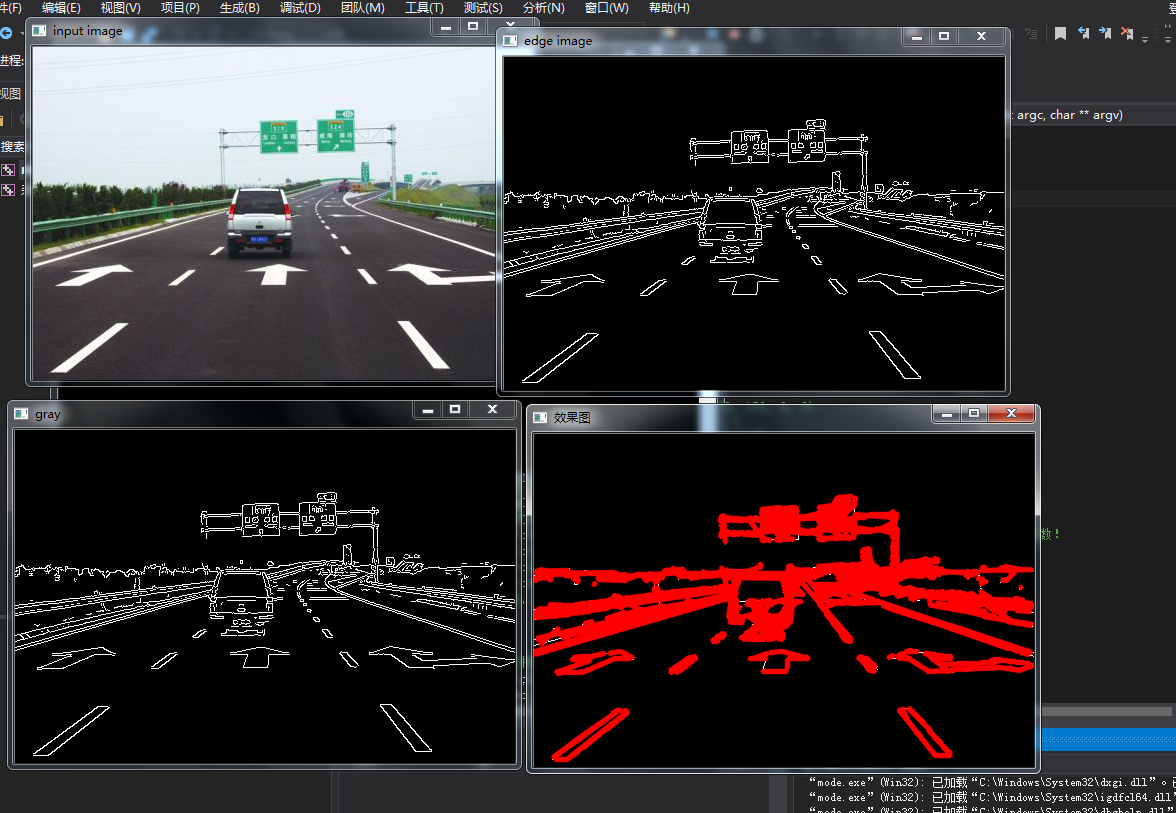
函数HoughLinesP的代码
#include <opencv2/opencv.hpp> #include <iostream> #include <math.h> using namespace cv; using namespace std; int main(int argc, char** argv) { Mat src, src_gray, dst; src = imread("E:\\VS2015Opencv\\vs2015\\project\\picture\\01.jpg"); char INPUT_TITLE[] = "input image"; imshow(INPUT_TITLE, src); Canny(src, src_gray, 150, 200); cvtColor(src_gray, dst, CV_GRAY2BGR); imshow("edge image", src_gray); imshow("gray", dst); //方法1(标准霍夫变换) //vector<Vec2f> lines; //HoughLines(src_gray, lines, 1, CV_PI / 180, 150, 0, 0); //for (size_t i = 0; i < lines.size(); i++) { // float rho = lines[i][0]; // 极坐标中的r长度 // float theta = lines[i][1]; // 极坐标中的角度 // Point pt1, pt2; // double a = cos(theta), b = sin(theta); // double x0 = a * rho, y0 = b * rho; // // 转换为平面坐标的四个点 // pt1.x = cvRound(x0 + 1000 * (-b));//对一个double型的数进行四舍五入,并返回一个整型数! // pt1.y = cvRound(y0 + 1000 * (a)); // pt2.x = cvRound(x0 - 1000 * (-b)); // pt2.y = cvRound(y0 - 1000 * (a)); // line(dst, pt1, pt2, Scalar(0, 0, 255), 1, CV_AA); //} //第二种方法(概率霍夫变换) vector<Vec4f> plines; HoughLinesP(src_gray, plines, 1, CV_PI / 180.0, 10, 0, 10); Scalar color = Scalar(0, 0, 255); for (size_t i = 0; i < plines.size(); i++) { Vec4f hline = plines[i]; line(dst, Point(hline[0], hline[1]), Point(hline[2], hline[3]), color, 3, LINE_AA); } imshow("效果图", dst); waitKey(0); return 0; }
主要参考博客:
原理部分:http://www.cnblogs.com/php-rearch/p/6760683.html(相当清楚,不解释,)
源码分析1:http://blog.csdn.net/zhaocj/article/details/50281537(赵春江老师,很多源码都给出了详解,尤其是那篇sift,看的热血沸腾)
源码分析2:http://blog.csdn.net/traumland/article/details/51319644
源码分析3:http://blog.csdn.net/sunshine_in_moon/article/details/45271647
Samples1:http://blog.csdn.net/poem_qianmo/article/details/26977557/ (还是浅墨)
Samples2:http://www.cnblogs.com/skyfsm/p/6881686.html
讲解:https://blog.csdn.net/qq_37059483/article/details/77891698
这篇博客的博主在进行Canny之前使用了大津法先进行分割:http://blog.csdn.net/dcrmg/article/details/52464209
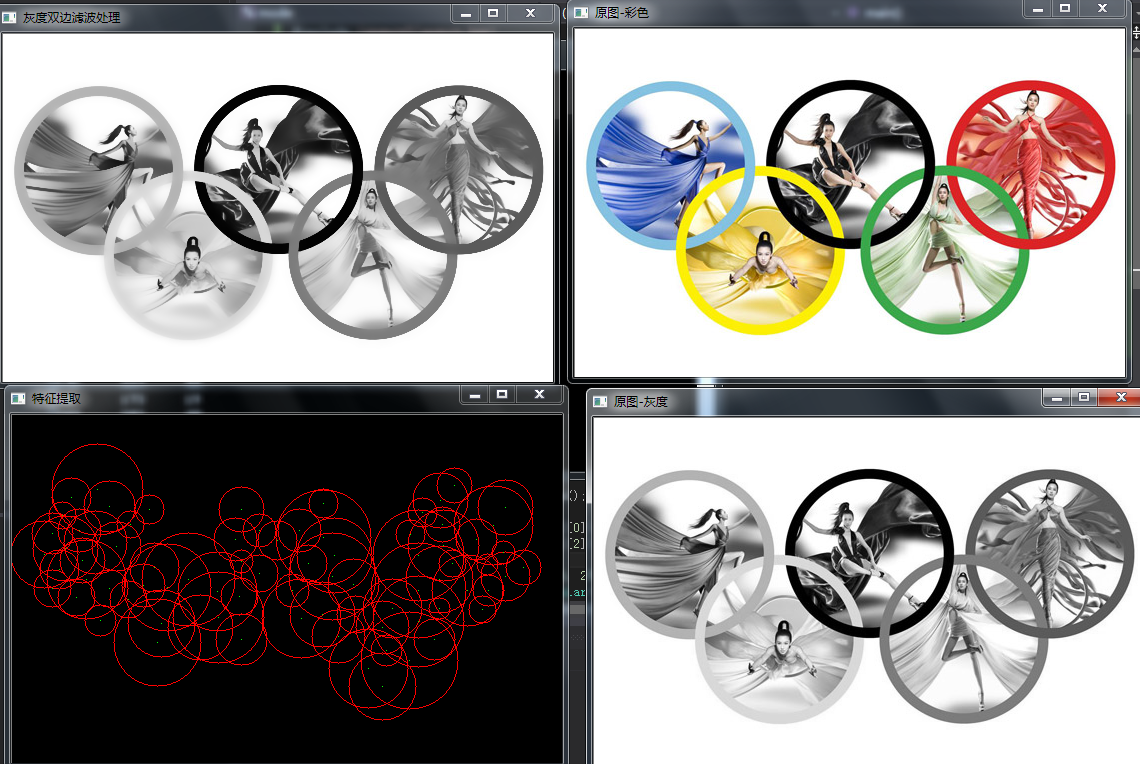
园检测
#include <opencv2/opencv.hpp> using namespace cv; using namespace std; const int kvalue = 15;//双边滤波邻域大小 int main() { Mat src_color = imread("E:\\VS2015Opencv\\vs2015\\project\\picture\\08.jpg");//读取原彩色图 imshow("原图-彩色", src_color); //声明一个三通道图像,像素值全为0,用来将霍夫变换检测出的圆画在上面 Mat dst(src_color.size(), src_color.type()); dst = Scalar::all(0); Mat src_gray;//彩色图像转化成灰度图 cvtColor(src_color, src_gray, COLOR_BGR2GRAY); imshow("原图-灰度", src_gray); imwrite("src_gray.png", src_gray); Mat bf;//对灰度图像进行双边滤波 bilateralFilter(src_gray, bf, kvalue, kvalue * 2, kvalue / 2); imshow("灰度双边滤波处理", bf); imwrite("src_bf.png", bf); vector<Vec3f> circles;//声明一个向量,保存检测出的圆的圆心坐标和半径 HoughCircles(bf, circles, CV_HOUGH_GRADIENT, 1.5, 20, 130, 38, 10, 50);//霍夫变换检测圆 cout << "x=\ty=\tr=" << endl; for (size_t i = 0; i < circles.size(); i++)//把霍夫变换检测出的圆画出来 { Point center(cvRound(circles[i][0]), cvRound(circles[i][1])); int radius = cvRound(circles[i][2]); circle(dst, center, 0, Scalar(0, 255, 0), -1, 8, 0); circle(dst, center, radius, Scalar(0, 0, 255), 1, 8, 0); cout << cvRound(circles[i][0]) << "\t" << cvRound(circles[i][1]) << "\t" << cvRound(circles[i][2]) << endl;//在控制台输出圆心坐标和半径 } imshow("特征提取", dst); imwrite("dst.png", dst); waitKey(); }
可以参考:http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/imgproc/table_of_content_imgproc/table_of_content_imgproc.html#table-of-content-imgproc

 浙公网安备 33010602011771号
浙公网安备 33010602011771号