KD树
-
-
算法训练营6.1
-
-
简介:
-
名称:KD树(K-Dimension tree)。
-
本质:是二叉树,但是是二叉搜索树的扩展,用于多维空间数据的搜索(范围搜索和最近邻搜索),提高搜索效率。
-
-
-
操作:
-
创建KD树:
KD树中的每个节点都对应着K维空间中的一块超矩形区域,可以省去大部分的搜索工作。
对K维数据划分时,需要考虑两个问题:
-
选择哪个维度划分?
-
选择哪个点做父亲,才能让其左右子树大小大致相等。
先解决第一个问题:选择哪一维作为分辨器。KD树可以根据不同的用途选择不同的分辨器,常见的是轮转法和最大方差法:
-
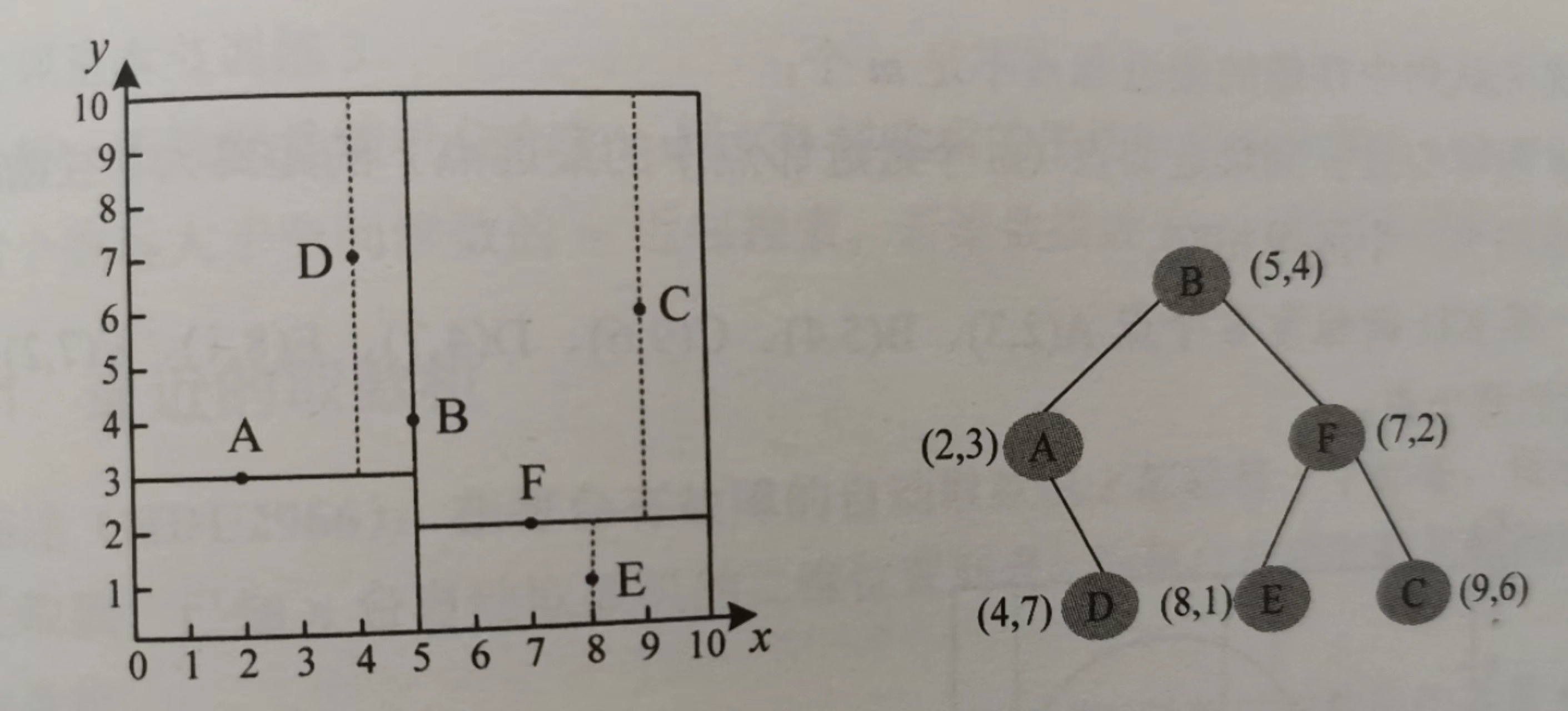
轮转法:按照维度轮流作为分辨器,对于二维数据(x, y),第一层按照x划分,第二层按y划分,然后第三层又按x划分...
![]()
第一层的B是因为在所有的点中,B的横坐标在中间,所以B做根,相当于竖着切了一刀,左子树就是在左边的A和D,右子树就是C、E、F。
第二层中,左子树中A在中间,所以A做根,按照y划分,D是A的右儿子;右子树中,F的纵坐标在中间,E的纵坐标更小,所以在F的左子树,C的纵坐标大于F,所以在F的右子树。
-
最大方差法:若数据在维度Di方差最大,则选择维度Di作为分辨器。因为方差代表数据的分散程度,越大就越容易划分。然后第二层再按第二大的方差选,...,直到循环一轮,然后又按照方差最大的维度切。
然后第二个问题,每次选中位数作为划分点,就像上面一样。可以采用STL的nth_element(begin, begin+k, end, compare)函数,该函数使得[begin, end)区间内的第k小的元素处于第k个位置,左边的元素均不超过这个值,右边的元素都不小于这个值,但并不保证别的元素有序,复杂度O(end-begin)。
const int N = 100100;
int idx; // idx表示按照idx维排序
struct Node {
int x[2];
bool operator < (const Node &b) const {
return x[idx] < b.x[idx];
}
}a[N];
struct KD_Tree {
int sz[N << 2]; // 类似线段树的操作
Node kd[N << 2]; // 同上
void build(int rt, int l, int r, int dep) { // 当前在rt节点,解决[l, r]区间的切分问题,深度为dep
if (l > r) return;
int mid = l + r >> 1;
idx = dep % k; // 用轮转法
sz[rt] = 1;
sz[rt << 1] = sz[rt << 1 | 1] = 0;
nth_element(a + l, a + mid, a + r + 1); // [l, r+1)
kd[rt] = a[mid]; // 中间节点当成根
build(rt << 1, l, mid - 1, dep + 1); // 左子树 [l, mid - 1] dep + 1深度
build(rt << 1 | 1, mid + 1, r, dep + 1); // 右子树 [mid + 1, r] dep + 1深度
}
}KDT; -
-
m近邻搜索:
KD树支持查询距离给定目标点p(不一定在树上)最近邻的m个点,从根节点出发,向下递归。当点p的当前行的维度坐标小于树根时,则在左子树中查询,否则在右子树中查询,在查询过程中使用优先队列(大根堆)存储最近的m个点,当存在某一个点q比大根堆中的最远点距离p更近时,pop之后让q入队。
什么情况下放到堆里呢?首先只有回溯到这个点的时候,即找完一半子树之后才考虑将这个点放入堆中,其次:
-
堆没满。
-
比根顶点更近。
然后就是判断到底去不去另一半子树查找,以下两种情况中,需要继续在当前划分点的另一区域查询(指查询完了一侧到底应不应该查另一侧):
-
当前大根堆中存储的点不足m个,这显然随便找点就可以放进去,肯定要找一下。
-
以p为球心,以p到根顶的点的距离为半径的“球体”和另一区域相交,那就是有机会有更小距离的点,所以也要找一下。
下面举个例子:
![]()
-
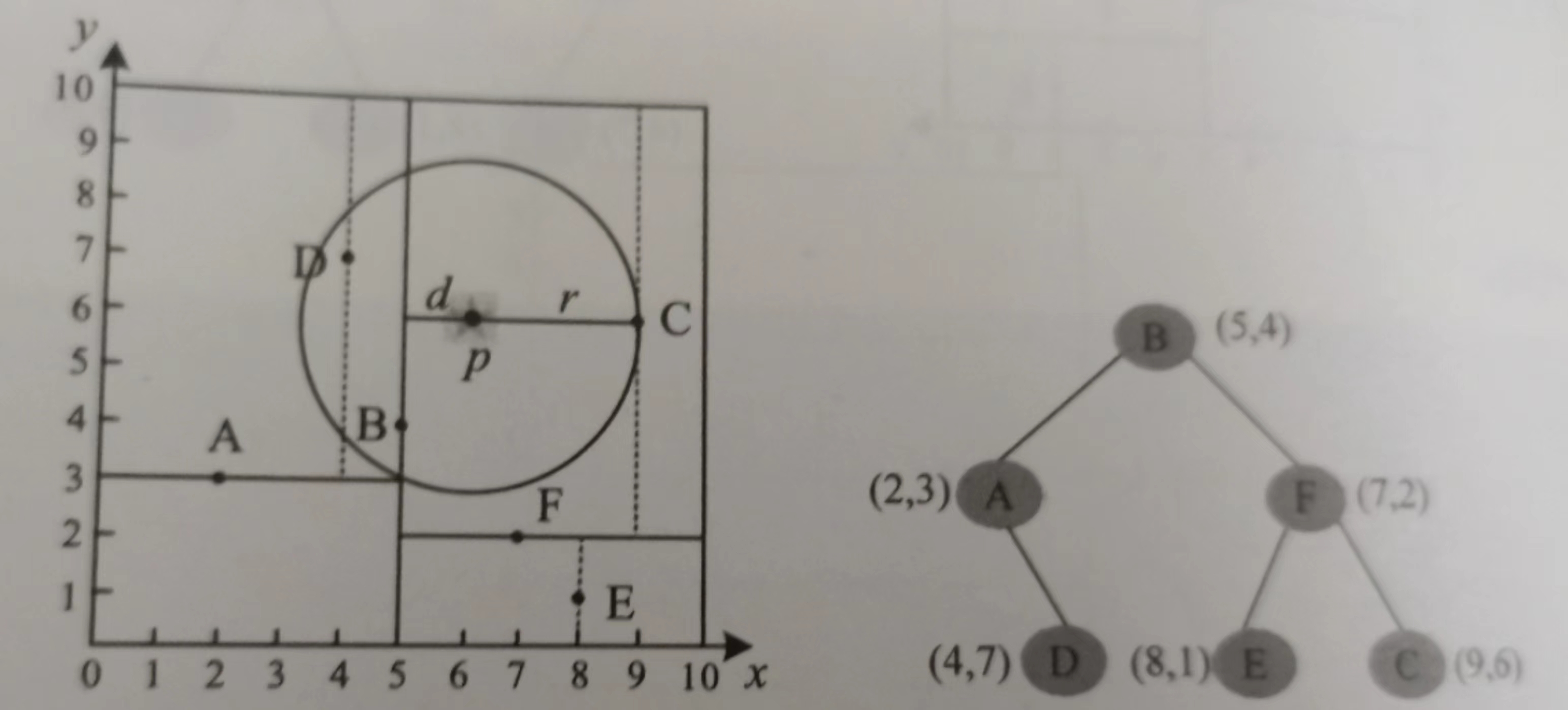
还是这个图,先看一下p(6, 6)的位置,想要找最近的两个点,初始位置在B。
-
因为p的x坐标大于B,所以先去右边找,到了F。
-
p的y坐标大于F,所以去右边找,到了C。
-
因为p的x坐标小于C,所以去左边找,哎,为空,回溯到C,因为堆未满,于是将C放进大根堆。
-
因为大根堆里只有一个东西,小于二,所以去C的右子树找,发现也为空,于是回溯到F,因为堆未满,于是将F放进大根堆,此时根顶为F。
-
半径为|pF|的圆和F的下半部分(另一区域)有相交的部分,所以去F的左子树找,到了E。
-
因为E的x坐标大于p,所以去E的左子树找,为空,回溯到E,发现|Ep|>|Fp|,于是不管E,也不管E的右子树,回溯到B。
-
因为|Bp|<|Fp|,即小于根顶的距离,于是F出队,B入队,现在根顶为C,同时因为这个圆和B的左子树代表区域有公共部分,所以需要去B的左子树,于是到了A。
-
因为A的y坐标小于p,所以去A的左子树,为空,回溯到A,A比根顶还远,于是A不能进队,同时因为以|Cp|为半径的圆和A的右子树(另一区域)有交点,所以需要去A的右子树找,于是到了D。
-
D的x坐标小于p,所以需要去D的右子树,为空,回溯到D。
-
发现D的距离小于堆顶C,于是C出队,D入队,此时堆顶为D。
-
又因为以|Dp|为半径的圆和另一区域即D的左子树的区域有公共部分,所以需要去D的左子树看一下,为空,返回,回溯到A,因为A已经判断过了,回溯到B,B判断过了,则运行结束。
最终结果为B和D。
(不知道是为什么的)结论:若数据是随机分布的,则KD树搜索的平均时间复杂度是O(logn),KD树适用于数据元素个数院小于空间维数的m近邻搜索,如果维数接近于n,则效率接近于线性扫描。
代码可能在例题里(x
-
-
-
例题:代码均仅为参考,重点领悟精神!!!ce、wa了概不负责!!!
-
(基础的代码编写)(HDU2966),T组测试样例,每一组给若干个二维点坐标,让输出对于每个节点,离它最近的点的距离平方(不算自己)。没有点重合的情况。
-