2020软工个人项目作业-平面几何图形交点统计
2020软工个人项目作业-平面几何图形交点统计
| 项目 | 内容 |
|---|---|
| 课程链接 | 2020春季计算机学院软件工程(罗杰 任健) |
| 作业要求 | 个人项目作业 |
| 课程目标 | 系统学习软件开发理论和流程,通过实践积累软件开发经验 |
| 本博客的收获 | 熟悉了C++语法,熟悉了VS工具使用,将书中开发项目的流程简单实践 |
| 教学班级 | 005 |
| 项目地址 | https://github.com/eitbar/IntersectProject.git |
一、估计将在程序的各个模块的开发上耗费的时间
| PSP2.1 | Personal Software Process Stages | 预估耗时(分钟) | 实际耗时(分钟) |
|---|---|---|---|
| Planning | 计划 | ||
| · Estimate | · 估计这个任务需要多少时间 | 10 | 10 |
| Development | 开发 | ||
| · Analysis | · 需求分析 (包括学习新技术) | 60 | 60 |
| · Design Spec | · 生成设计文档 | 40 | 100 |
| · Design Review | · 设计复审 (和同事审核设计文档) | 10 | 50 |
| · Coding Standard | · 代码规范 (为目前的开发制定合适的规范) | 0 | 0 |
| · Design | · 具体设计 | 60 | 60 |
| · Coding | · 具体编码 | 150 | 150 |
| · Code Review | · 代码复审 | 10 | 20 |
| · Test | · 测试(自我测试,修改代码,提交修改) | 60 | 120 |
| Reporting | 报告 | ||
| · Test Report | · 测试报告 | 30 | 30 |
| · Size Measurement | · 计算工作量 | 10 | 10 |
| · Postmortem & Process Improvement Plan | · 事后总结, 并提出过程改进计划 | 60 | 120 |
| 合计 | 580 | 730 |
从上表看出,设计阶段、测试阶段以及总结阶段与预估时间相差较大。
我将思考解题算法以及代码设计归入生成设计文档,和同学讨论该怎么做归入设计复审。事后感觉这两部分并不应该花这么长时间,太过担心性能而举棋不定、犹犹豫豫不是什么好事,而且从最终结果来看,纠结了半天使用的还是简单的“暴力”,这两部分时间是被“浪费”掉的。
测试阶段是因为在不熟悉单元测试的情况下错误测试花费时间,以及研究性能提升的方法也花费了较长时间。
二、解题思路描述
需求分析
功能需求:给定 N 条直线,询问平面中有多少个点在至少 2 条给定的直线上。题目输入保证答案只有有限个。
测试需求:提交的程序需要支持传入参数及相应约定。
附加拓展需求:图形中有圆。
用不严谨的通俗语言描述,问题即平面上N个直线共有几个不重复的交点。需要注意的有以下几点:
- 多条直线可能交于一点。
- 直线的信息由两个整数坐标点确定,但交点坐标可能为小数。
- 项目要求能支持命令行参数,数据文件读取,输出写入文件。
- 总的交点个数小于5000000,意味着可能会有大量的重复点计算。
- N可能会很大。
需要掌握的知识:直线与圆的表示。直线与直线求交点的计算方法。圆与圆的求交点的计算方法。圆与直线的求交点的方法。
解题思路
最直接的一个想法,就是N条直线两两计算交点坐标并保存,不重复保存相同的坐标,最终统计保存的坐标的个数即为题目答案。使用Hash判重,假定时间复杂度为计算常数O(k),那么该做法时间复杂度为O(N2*k),空间复杂度为O(N2)。组略估算O(108)为1秒的话,且加上计算常数的话,当N小于等于1000时,该做法可以在60秒内得到结果,满足正确性评分的需求,但考虑到性能部分的要求,该方法需要被改进。
进一步思考,平行线之间肯定无交点,那么遍历的时候是否可以忽略平行线呢?我们可以通过计算每条直线的斜率,来给直线分组,斜率相同的直线为一组,同组间直线无需遍历。假如最后共分 \(m\) 组,每组 \(l_i\) 条直线,因此总共会减少 \(\sum l_i^2\) 次计算,在某些情况下,性能应该可以有一定的提升,但仍然无法保证肯定在60s内得到结果。
再仔细想想,算法的瓶颈主要在于重复点的计算,是否可以通过某种方法减少重复点的计算呢?我们将N条直线按顺序添加到整个图中,在计算交点时,记录下该交点被多少条直线相交。但是由于C++使用经验比较匮乏,而且不好估算计算交点的时间复杂度与C++标准库中一些数据结构的使用时间复杂度,因此作罢。
最后考虑到拓展需求圆的话,可以先用上述方法处理完直线,再直接暴力处理圆。
我到网络上查询了相关问题,可是并没有获得好的算法,希望作业结束后,能从老师以及其他同学博客中获得新的知识。
三、设计实现过程
首先,需要存储输入的几何图形的信息,即直线类、圆类,类中可以提前存储之后需要计算的部分以节省时间。接着在我们的算法中,还需要为几何图形的交点构建交点类。
三个类的具体设计为:
-
交点类:
- 属性:
double:横坐标; - 属性:
double:纵坐标;
- 属性:
-
直线类:
- 属性:
double,double,double:直线一般方程的三个参数(\(ax+by+c=0\)); - 属性:
double,double:斜率(斜率为正无穷时,规定为inf),截距(为正无穷时,规定为inf); - 属性:
double,double:直线过的任意一点; - 方法:
Point:求与另一条直线的交点
- 属性:
-
圆类:
- 属性:
double,double:圆心坐标; - 属性:
double:半径; - 属性:
double,double,double:圆的一般方程的三个参数(\(x^2+y^2+dx+ey+f=0\)) - 方法:
std::vector<Point>:求与另一条直线的交点 - 方法:
std::vector<Point>:求与另一个圆的交点
- 属性:
交点使用map、set等可以快速查询的数据结构进行存储。直线使用数组、set等可以组织顺序的数据结构存储。圆使用任意可以遍历的数据结构存储。
主函数的处理流程为,读取命令行参数,简单解析后,读取数据,并保存在数组或其他数据结构中。接着将问题拆分为直线与直线的交点,圆与其他几何图形的交点。调用solveLine()函数统计直线与直线交点个数,再调用solveCycle()函数统计圆与直线的交点个数。最后输出结果到文件中。
solveLine()函数的主要流程为:首先,将直线按照斜率分组,默认开始处理前平面上没有任何几何图形。接着依次向平面中添加直线,添加时调用该直线求与直线交点的函数,计算直线与平面中已有直线的交点,查询交点是否已经存在,若不存在,将交点存入数据结构,并且统计数量增加。
solveCycle()函数的主要流程为:依次向平面中添加圆,并调用该圆求与其他几何图形交点的函数,计算与已有图形的交点,查询交点是否已经存在,若不存在,将交点存入数据结构,并且统计数量增加。
直线与直线的交点计算函数:先判断是否平行,若平行返回特殊点,否则,使用计算公式计算交点。此处需要设置单元测试,测试计算结果是否正确。测试平行情况下、斜率为0、斜率不存在的直线互相相交的情况。
圆与直线的交点计算函数:先计算直线与圆心距离,判断有几个交点,若没有交点,返回空队列;若相切一个交点则计算圆心向直线作垂线的垂足,并返回包含一个交点的队列;若有两个交点,先计算圆心向直线作垂线的垂足,再沿直线的方向向量加减一定的长度,得到两个交点,并返回包含两个交点的队列。此处需要设置单元测试,测试计算结果是否正确。测试圆与直线相切、相交、相离的求交点情况,其中直线需要包括斜率为0、斜率不存在的特殊情况。
圆与圆的交点计算函数:先通过圆心距离判断两圆是否相交,若不相交则返回空队列;若相交则通过圆的一般方程计算出直线,再计算圆与直线的交点个数。此处需要设置单元测试,测试圆与圆内切、外切、相交、外离、内含的求交点情况。
除了必要函数之外,需要新增浮点数比较函数,精度设置为1e-8。该函数接受两个参数,若第一个参数大于第二个,则返回正数,等于返回0,小于返回负数。此处需要设置单元测试,测试浮点数比较是否正确。
如果使用的数据结构需要对类型重载,也需要编写相应的重载函数。
四、性能改进。
初版程序性能分析
在完成初版代码,反复修改bug,并通过单元测试和一系列数据测试之后,对程序进行性能分析。
性能分析使用数据为:随机生成的7000条几何图形数据,其中直线与圆各3500个,最终计算得到交点数为22191950个交点。随机数生成模块为python中random包。生成数据所用代码以及性能测试时使用的数据已经上传至github项目中。
VS2019中使用性能探查器,分析CPU利用率如下:
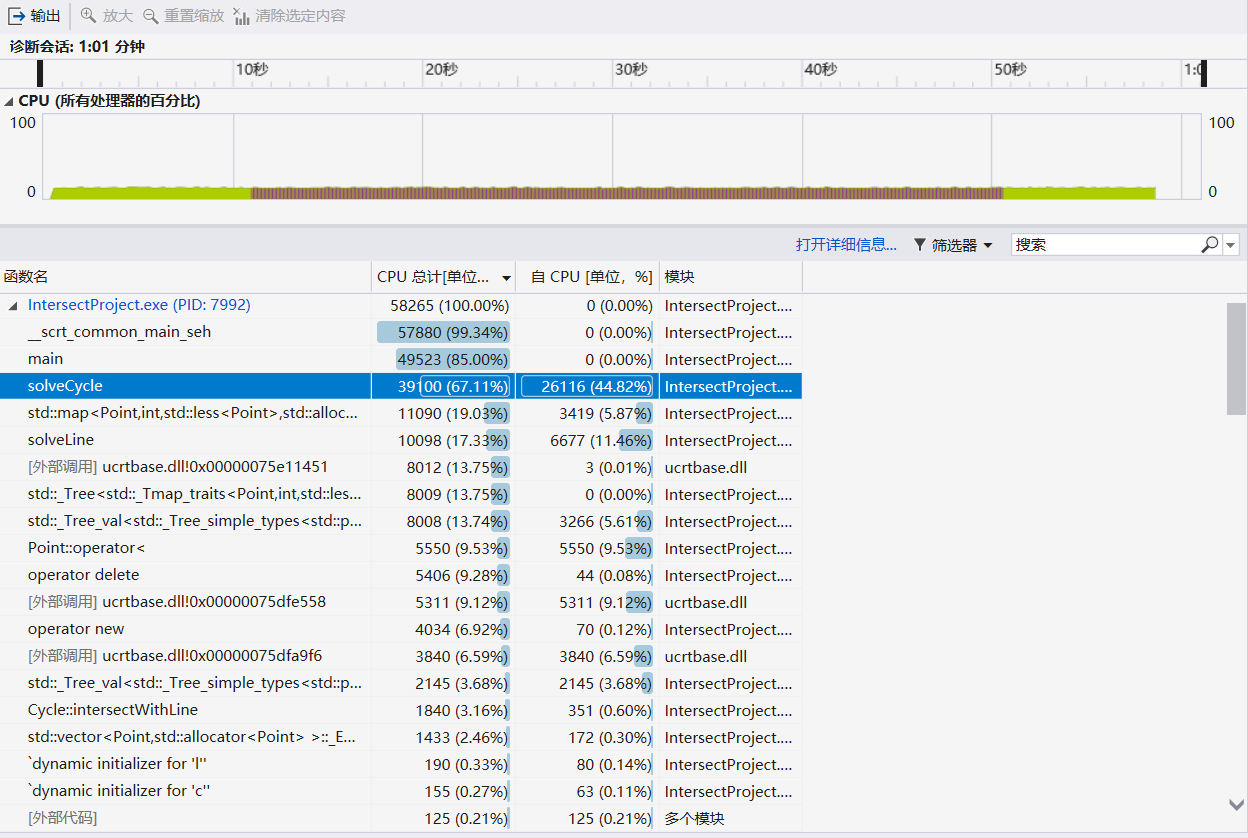
可以看出,耗费时间最多的函数,应该是统计所有的圆与其他几何图形的交点的函数,这也在情理之中。点进详细报告页面,分析solveCycle()函数结果如下:
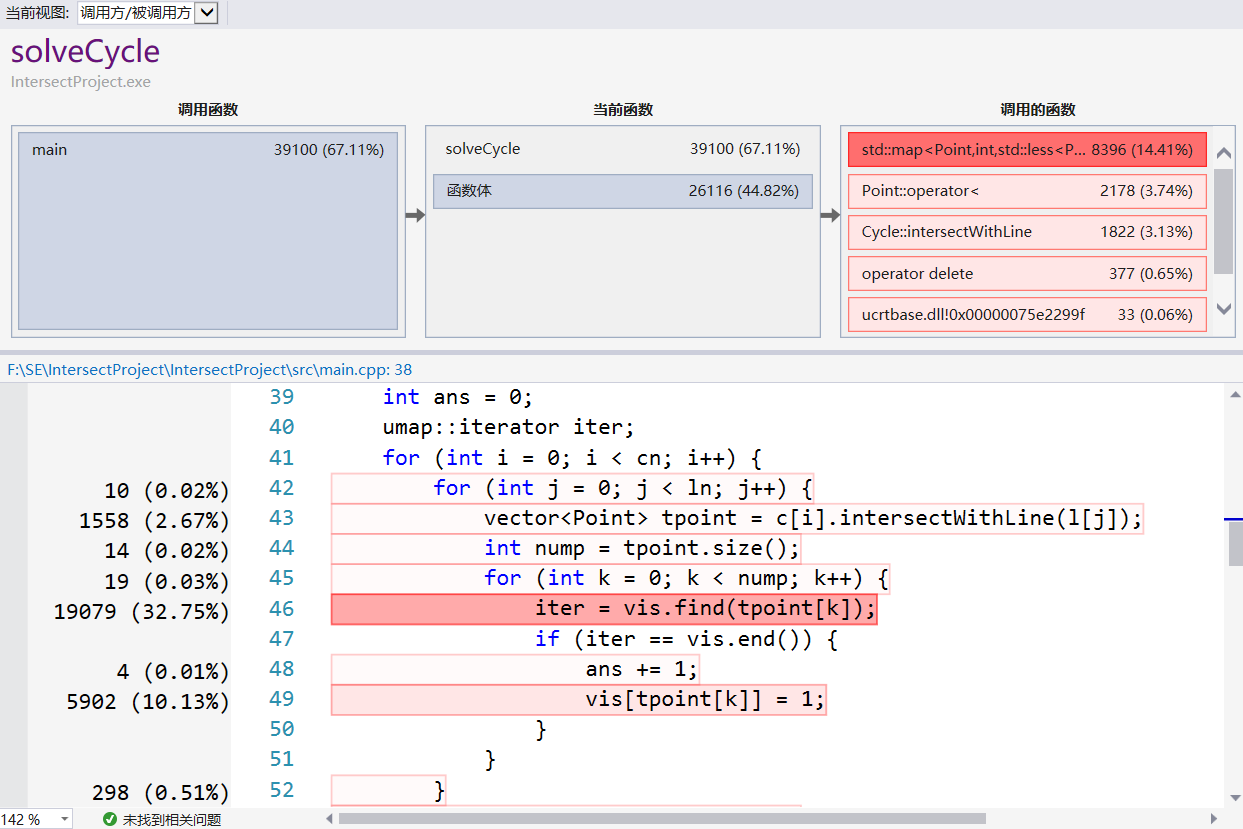
令人意外的是,相比计算所占时间,在圆与直线求交点的过程中,对map数据结构的修改与查询花费的时间更多。通过查阅资料可知,C++标准库中map主要通过红黑树实现,查询和修改时间复杂度均为\(O(\log(n))\)。然而,在本题中,我们完全不需要用到其顺序结构,而且Point类内容较为简单。经过一番资料查询,我发现C++中有unordered_map这一数据结构,其功能类似java中hashmap,在查询和修改方面速度快于map,因此我决定更换记录交点的数据结构为unordered_map,并为Point重载hash方法。
初步优化后性能分析
将记录交点的数据结构更换为unordered_map后,我是用同样的数据、同样的操作对程序进行性能分析,得到结果如下:
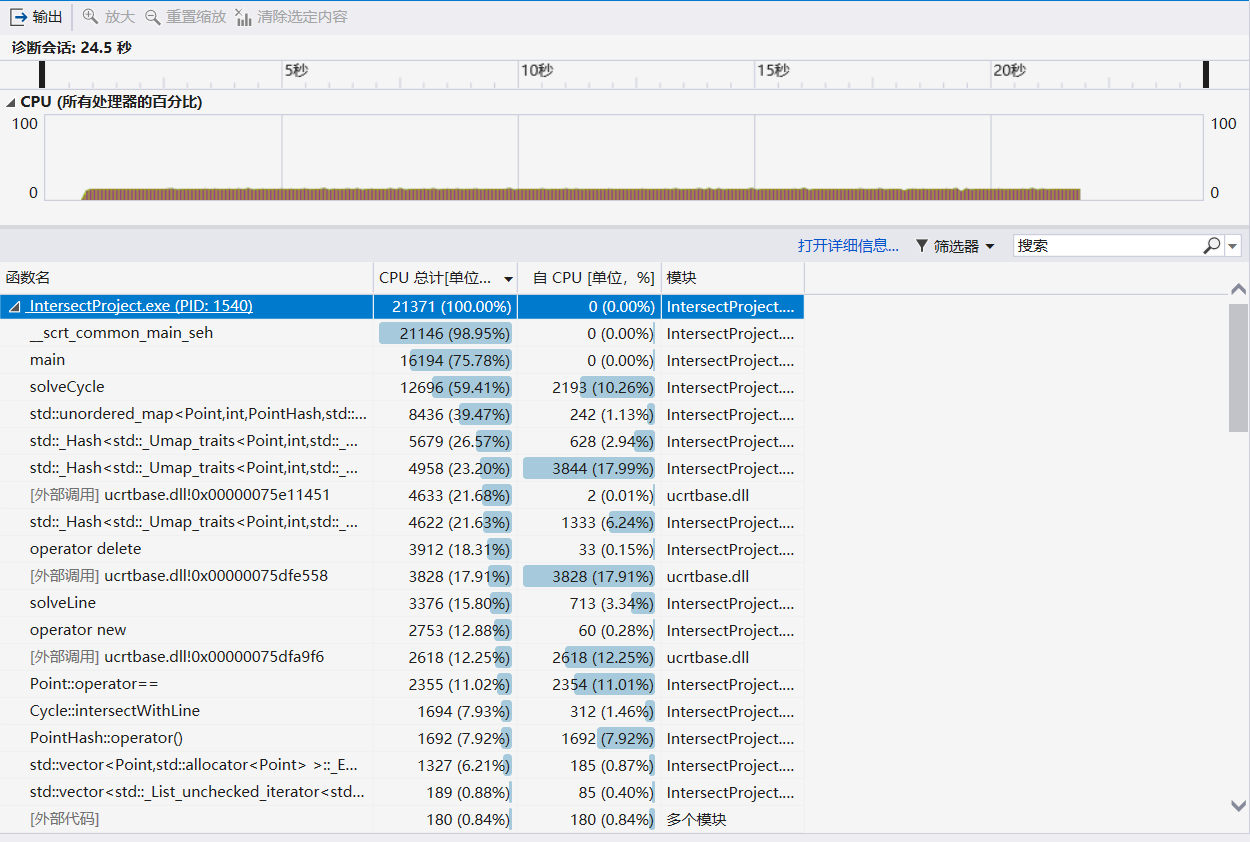

可以从整个程序的运行时间上,明显的感受到更换数据结构带来的优化。从原本的1分01秒降低到了24.5秒,值得开心一小会儿 😃
但是,转念感觉到有些奇怪,本以为程序的性能瓶颈应该是多次重复计算交点,但为什么此处变成了记录交点的数据结构的使用呢?
性能优化后续思考
随后,通过分析测试性能用的数据,我发现我的测试数据其实是与需求不符的数据,因此该性能分析其实并不能帮我解决算法的瓶颈在何处。
因为我使用的数据是随机生成的,重合的交点很少,总的交点数很多,因此时间复杂度被堆在了维护交点的数据结构上。而题目明确说明,交点有个数限制,针对题目的需求,性能优化的重点其实应该放在减少重复点的计算上,这个数据结构的改动可能在实际测试中只能占小头。
不合理的测试数据,帮我得出了不合理的性能瓶颈,因此该性能分析其实并不能帮我解决算法的瓶颈在何处,更改这个数据结构最终能帮到我的应该也不会很多。
除了如何生成更合理的测试数据外,还有一个问题让我略感疑惑。在实际软件开发中,性能优化应该是必不可少的一环,当我们软件还没成型的时候,没有用户数据,如何知道哪里才是性能优化的重点呢?如果侧重点出错,比如我花大力气去自己写一个插入查找速度极快的数据结构(我就可以直接发论文作报告走上人生巅峰了),结果在实际使用中别人根本不去使用这个功能,或者说这个功能的速度其实并不影响客户的体验,那我是不是白费力气了呢?
五、关键代码说明
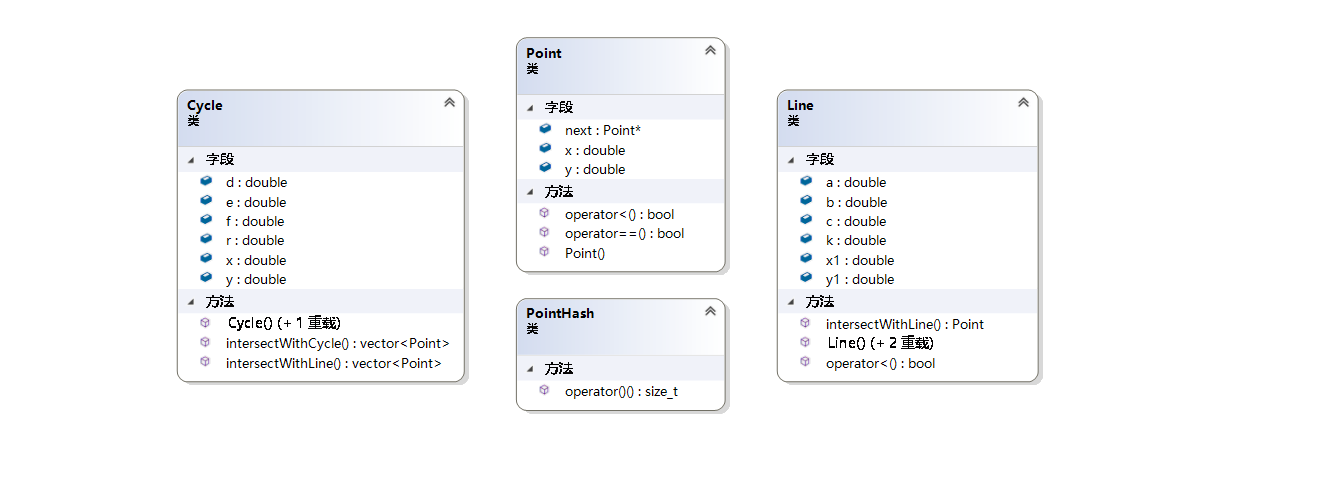
首先,使用vs2019自带的类图查看器生成的类图如下:
自认为我的关键代码有三部分。
-
solveLine():往平面中添加直线计算交点并忽略平行线,这部分应该是我与直接暴力求交点唯一不同的部分啦,而且按交点个数较少来推论,平行线应该不多,优化的性能不值一提。代码及注释如下图所示:int solveLine() { //ans为统计交点个数 int ans = 0; //将直线按斜率排序,实现斜率分组功能 sort(l, l + ln); //map查找用的迭代器 umap::iterator iter; //依次遍历直线,当前待添加直线为i for (int i = 0; i < ln; i++) { //按顺序遍历已经添加到平面中的直线 for (int j = 0; j < i; j++) { //如果遍历到平面中直线j与i的斜率相同,那么j~i之间的直线斜率都与i相同,不再计算i if (doublecompare(l[i].k, l[j].k) == 0) { break; } //求直线i与j的交点 Point tpoint = l[i].intersectWithLine(l[j]); //如果是新交点,加入umap中,并统计结果,否则不做处理 iter = vis.find(tpoint); if (iter == vis.end()) { ans += 1; vis[tpoint] = 1; } } } return ans; } -
std::vector<Point> Cycle::intersectWithLine(Line t):求圆与直线的交点,并保存在vector中返回,思路为先求垂足,再沿方向向量加减,代码及注释如下:std::vector<Point> Cycle::intersectWithLine(Line t) { //交点vector std::vector<Point>ps; //先计算圆心到直线的距离 double ld = abs(t.a * x + t.b * y + t.c) / sqrt(t.a * t.a + t.b * t.b); //相离 if (doublecompare(ld, r) == 1) { return ps; } //相切 else if (doublecompare(ld, r) == 0) { //斜率不存在,横坐标为直线横坐标,纵坐标为圆心纵坐标 if (t.k == inf_k) { ps.push_back(Point(t.x1, y)); return ps; } //斜率为0,横坐标为圆心横坐标,纵坐标为直线纵坐标 if (t.k == 0) { ps.push_back(Point(x, t.y1)); return ps; } //斜率正常 //先算过圆心与直线t垂直的线y=-1/k*x+b2 double b2 = x / t.k + y; //直线t斜截式中b1 double b1 = t.b1; //两直线求交点,即垂足 double xt = t.k * (b2 - b1) / (1 + t.k * t.k); double yt = t.k * xt + b1; //相切时,垂足即交点 ps.push_back(Point(xt, yt)); return ps; } //相交 double ln = sqrt(r * r - ld * ld); //同理 if (t.k == inf_k) { ps.push_back(Point(t.x1, y - ln)); ps.push_back(Point(t.x1, y + ln)); return ps; } if (t.k == 0) { ps.push_back(Point(x - ln, t.y1)); ps.push_back(Point(x + ln, t.y1)); return ps; } double b2 = x / t.k + y; double b1 = t.b1; double xt = t.k * (b2 - b1) / (1 + t.k * t.k); double yt = t.k * xt + b1; //求出垂足后,求直线方向向量 double s1k2 = sqrt(1 + t.k * t.k); double nx = 1 / s1k2; double ny = t.k / s1k2; //加减方向向量与半弦长的乘积得到两个交点 ps.push_back(Point(xt + ln * nx, yt + ln * ny)); ps.push_back(Point(xt - ln * nx, yt - ln * ny)); return ps; } -
std::size_t operator()(const Point& c) const:使用unordered_map时为Point类指定的hash函数,代码如下:class PointHash { public: std::size_t operator()(const Point& c) const { //直接利用库中hash函数,为防止32/64位操作系统的影响,默认size_t为32位,x,y各分16位 return hash<double>()(c.x) + (hash<double>()(c.y) << 16); } };
六、代码警告消除
使用VS2019本机推荐规则,错误数和警告数都为0!



 浙公网安备 33010602011771号
浙公网安备 33010602011771号