
STM32 HAL库之串口详细篇(基于HAL库)
一、基础认识
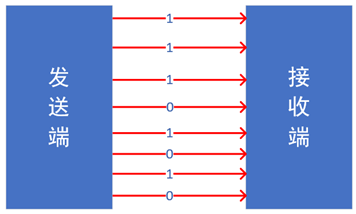
(一) 并行通信
原理:数据的各个位同时传输
优点:速度快
缺点:占用引脚资源多,通常工作时有多条数据线进行数据传输
8bit数据传输典型连接图:
传输的数据是二进制:11101010,则通信使用8条线同时进行数据传输,发送端一次性发送8位数据,接收端一次性接收8位数据。
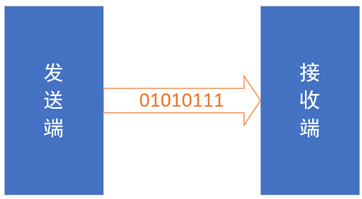
(二) 串行通信
原理:数据按位顺序传输
优点:占用引脚资源少
缺点:速度相对较慢,通常工作时只有一条数据线进行数据传输
8bit数据传输典型连接图:
传输的数据是二进制:11101010,则通信使用8条线同时进行数据传输,发送端一次性发送8位数据,接收端一次性接收8位数据。
8bit数据传输典型连接图:
传输的数据是二进制:11101010,则通信使用1条线进行数据传输,发送端一次性发送1位数据,接收端一次性接收1位数据。
串行通信的分类:
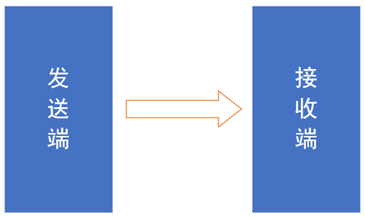
1.单工:数据只能在一个方向上传输,通信双方数据只能由一方传输到另一方
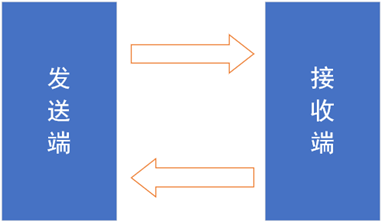
2.半双工:数据可以错时双向传输,通信双方数据可以支持两个方向传输,但是同一时间只能由一方传输到另外一方。

3.全双工:数据可以同时双向传输,通信双方数据可以同时进行双向传输,对于其中一个设备来说,设备需要支持发送数据时可以进行数据接收。
串行通信的通讯方式:
l 同步通信:带时钟同步信号的传输,如SPI、IIC、USART(同步)
l 异步通信:不带时钟同步信号的传输,如UART、USART(异步)
常见数据传输协议:

(三) UART和USART
UART:通用异步收发器
USART:通用同步/异步收发器,其可选使用异步方式,那将和UART无区别,如果是同步,则需要多一根时钟线(USART_CK)

(四) STM32的USART注意:
l 通常USART1接口的通信速率较快,其它USART接口较慢。如STM32F103C8T6的USART1接口通信速率是4.5Mbps,其它USART接口的通信速率是2.25Mbps。
l 片上所有的USART接口都可以使用DMA操作
l USART的扩展及距离:
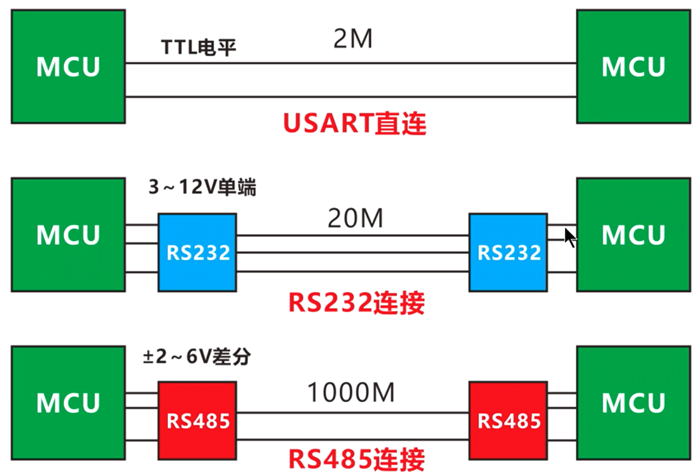
UART和COM是物理接口形式(物理接口)
TTL和RS-232是电平标准(电信号)
串口接收:
l 扫描模式
l 中断模式
l DMA模式
二、串口基础配置
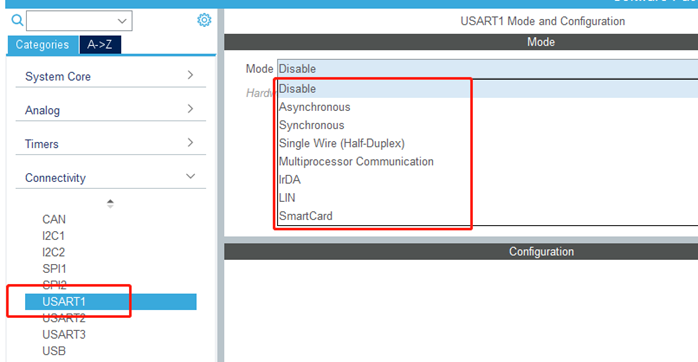
模式选择:
Asynchronous 异步通信
Synchronous 同步通信
Single Wire (Half-Duplex) 单线/半双工
Multiprocessor Communication 多处理器
支持局域互连网络LIN、智能卡(SmartCard)协议与lrDA(红外线数据协会) SIR ENDEC规范。

默认的TX GPIO:
l 模式为:推挽式复用功能
l 输出速率:高速
默认的RX GPIO:
l 模式为:浮空输入
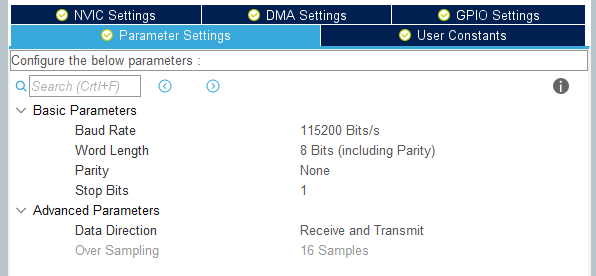
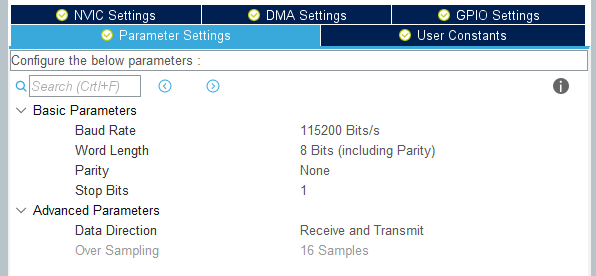
参数设置
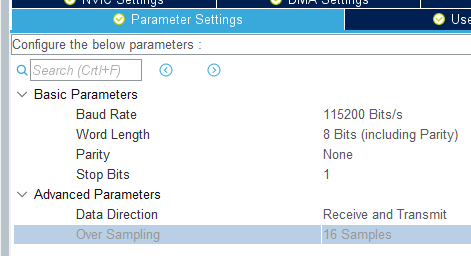
l Baud Rate
任意设置,未做限制,输入框

l Word Length
数据位可选8位或9位

l Parity
校验位可选无校验(None)、偶校验(Even)、奇校验(Odd)

l Stop Bits
停止位可选1位、2位

l Data Direction
数据方向,可选收发(Receive and Transmit)、只接收(Receive Only)、只发送(Transmit Only)

三、阻塞发送函数
以阻塞模式发送大量数据
当没有启用UART奇偶校验( PCE sign0 ),并且单词长度配置为9位( m1 - m0 sign01 )时,*发送的数据作为一组U16处理。在9位/无奇偶校验传输的情况下,pData需要作为uint16_t指针处理
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
参数:
huart: 指向uart _ handletypedef结构的huart指针,该结构包含指定uart模块的配置信息。
PData: 指向数据缓冲区的pData指针(U8或u16数据元素)。
Size: 要发送的数据元素( u8或U16 )的大小
Timeout:超时持续时间,单位ms,0就是0ms超时,数据最大发送时间,超过则返回异常
返回:
HAL 状态
typedef enum { HAL_OK = 0x00U, HAL_ERROR = 0x01U, HAL_BUSY = 0x02U, HAL_TIMEOUT = 0x03U } HAL_StatusTypeDef;
例如:
HAL_UART_Transmit(&huart1,"dongxiaodong\r\n",strlen("dongxiaodong\r\n"),0xFFFF);
四、串口扫描接收
(一)相关函数
l 阻塞接收函数
在阻塞模式下接收大量数据。
当没有启用UART奇偶校验( PCE sign0 ),并且单词长度配置为9位( m1 - m0 sign01 )时,*接收到的数据作为一组U16处理。
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
huart: 指向uart _ handletypedef结构的huart指针,该结构包含指定uart模块的配置信息。
pData:指向数据缓冲区的指针( u8或U16数据元素)。
Size: 要接收的数据元素数量( u8或U16 )。
Timeout:超时持续时间,单位ms,0就是0ms超时,数据接收最大等待时间,超出则异常
返回:
HAL 状态
typedef enum { HAL_OK = 0x00U, HAL_ERROR = 0x01U, HAL_BUSY = 0x02U, HAL_TIMEOUT = 0x03U } HAL_StatusTypeDef;
例如:
uint8_t data=0; while (1) { if(HAL_UART_Receive(&huart1,&data,1,0)==HAL_OK){ } }
(二)代码实现
HAL_UART_Transmit(&huart1,"dongxiaodong\r\n",strlen("dongxiaodong\r\n"),0xFFFF); uint8_t data=0; while (1) { //串口接收数据 if(HAL_UART_Receive(&huart1,&data,1,0)==HAL_OK){ //将接收的数据发送 HAL_UART_Transmit(&huart1,&data,1,0); } }
其中timeout为0表示没有延时,所以串口接收函数是不阻塞的,while循环将一直轮询
加个延时函数
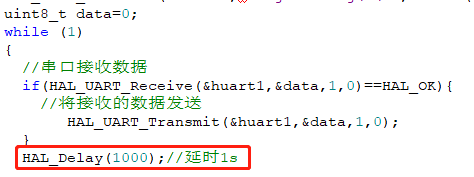
这样一来的话,接收数据就异常了,会接收数据不全,所以这样是不可靠的
那改成这样呢?
uint8_t data[100]={0}; if(HAL_UART_Receive(&huart1,data,100,1000)==HAL_OK){ }
接收100个数据,等待时间为1秒,这样的话接收区没满时,每次运行这条语句都要延时等待1S,这时相当于一个HAL_Dealy(1000),这会阻塞while循环。只有数据接收到刚刚等于100才能返回HAL_OK,所以不能用于接收变成数据,这是不理想的。
五、 串口中断接收
(一)cubemx设置
使能串口中断

优先级选择

Preemption Priorit:抢占优先级
Sub Priority :子优先级
数字越小优先级越高
自动生成的代码中已经使能了中断

(二)相关函数
l 接收中断开启,只开启一次中断
以非阻塞模式接收一定数量的数据,当UART奇偶校验未启用(PCE = 0),且字长配置为9位(M1-M0 = 01)时,
*接收到的数据作为一组u16处理。在这种情况下,Size必须指出数字
*的u16可通过pData。
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
参数:
huart: 指向uart _ handletypedef结构的huart指针,该结构包含指定uart模块的配置信息。
pData:指向数据缓冲区的指针(u8或u16数据元素)。
Size:需要接收的数据元素(u8或u16)的数量。
返回:
HAL 状态
typedef enum { HAL_OK = 0x00U, HAL_ERROR = 0x01U, HAL_BUSY = 0x02U, HAL_TIMEOUT = 0x03U } HAL_StatusTypeDef;
l 中断接收回调函数
HAL_UART_RxHalfCpltCallback();一半数据接收完成时调用
HAL_UART_RxCpltCallback();数据完全接受完成后调用
函数原型
void HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart); void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
(三) 编程实现方法1
uint8_t my_uart1_redata=0; //开启串口接收中断 void my_uart1_enable_inpterr(){ //开启一次中断 HAL_UART_Receive_IT(&huart1,&my_uart1_redata,1); } //串口收到数据回调 void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){ if(huart->Instance == USART1)//判断串口号 { //发送 HAL_UART_Transmit(&huart1,&my_uart1_redata,1,100); //开启一次中断 HAL_UART_Receive_IT(&huart1,&my_uart1_redata,1); } }
存在问题:
数据发送太快之后就可能导致单片机无法再接收数据,以至于永久性损坏,通常可以在主循环里判断标志位再次启动,可以避免永久性损坏问题。
(四) 编程实现方法2
修改stm32f1xx_it.c里面的串口中断
#include <usart.h> void USART1_IRQHandler(void) { /* USER CODE BEGIN USART1_IRQn 0 */ //正在接收 if(__HAL_UART_GET_FLAG(&huart1, UART_FLAG_RXNE) != RESET) { //NET_UART_RECV(READ_REG(huart1.Instance->RDR)); my_uart1_callback(huart1.Instance->DR); __HAL_UART_CLEAR_FLAG(&huart1,UART_FLAG_RXNE); } //溢出-如果发生溢出需要先读SR,再读DR寄存器 则可清除不断入中断的问题 if(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_ORE)== SET) { __HAL_UART_CLEAR_FLAG(&huart1,UART_FLAG_ORE); //读SR //READ_REG(huart1.Instance->RDR); //读DR } //手动关闭自带的串口中断处理 #if 0 /* USER CODE END USART1_IRQn 0 */ HAL_UART_IRQHandler(&huart1); /* USER CODE BEGIN USART1_IRQn 1 */ #endif /* USER CODE END USART1_IRQn 1 */ }
标准函数
//开启串口接收中断 void my_uart1_enable_inpterr(){ //开启一次中断 __HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE); //使能接收中断 } //串口收到数据回调 void my_uart1_callback(uint8_t rdata){ //发送 HAL_UART_Transmit(&huart1,&rdata,1,1); }
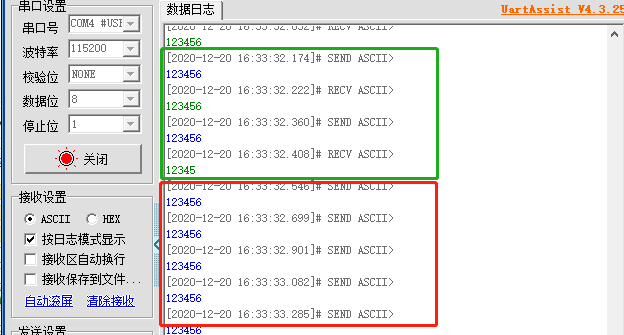
修改了HAL自带的串口中断函数,可以有效的避免接收中断失效问题,但是你测试的时候会发现串口助手发送的数据和串口助手接收到的数据不完整,这是正常的,因为中断接收是很快的,而发送是阻塞的,而实际也不会这样使用,所以一般都会用数组做缓冲区接收串口数据。
六、 配置串口为中断接收DMA发送
l STM32可用DMA的外设:定时器、ADC、SPI、IIC、USART
l 使用DMA必须开启中断
l 串口DMA模式最大为u16个字节,则65535
(一)cubmx设置
通用配置

中断开启

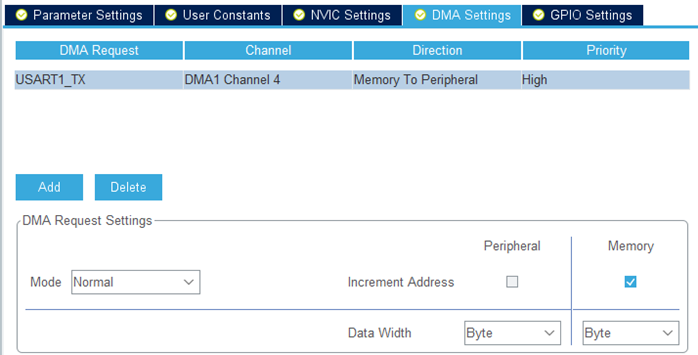
DMA发送设置
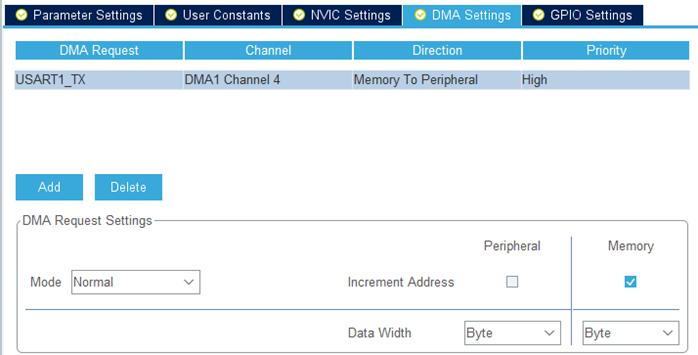
Dirction : DMA传输方向
四种传输方向:
l 外设到内存 Peripheral To Memory
l 内存到外设 Memory To Peripheral
l 内存到内存 Memory To Memory
l 外设到外设 Peripheral To Peripheral
Priority: 传输速度
l 最高优先级 Very Hight
l 高优先级 Hight
l 中等优先级 Medium
l 低优先级;Low
Priority: 优先级
l 最高优先级 Very Hight
l 高优先级 Hight
l 中等优先级 Medium
l 低优先级;Low
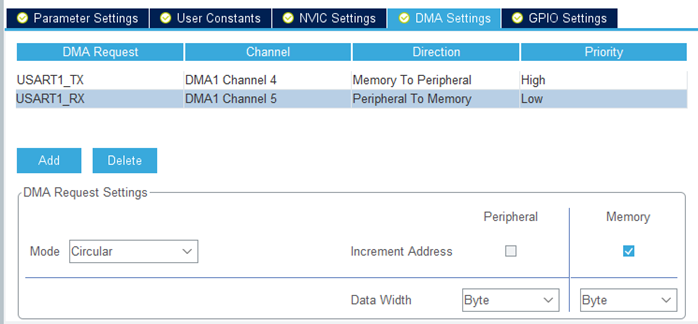
mode:模式
l Normal:正常模式,当一次DMA数据传输完后,停止DMA传送 ,也就是只传输一次
l Circular: 循环模式,传输完成后又重新开始继续传输,不断循环永不停止
Increment Address:地址增加
l Peripheral:设置传输数据的时候外设地址是不变还是递增。如果设置 为递增,那么下一次传输的时候地址加 Data Width个字节,勾选表示递增。
l Memory:设置传输数据时候内存地址是否递增。如果设置 为递增,那么下一次传输的时候地址加 Data Width个字节,这个Src Memory一样,只不过针对的是内存。,勾选表示递增。
data width:数据宽度
byte:字节,通用8位,与u8相同
word:字长,与硬件的位数相同,STM32是32位,所以对应是u32
Half Word:半个字长,所以对应是u16
(二) 编程实现
串口DMA发送
#include "string.h" extern DMA_HandleTypeDef hdma_usart1_tx; //发送数组数据 void my_uart1_send_data(uint8_t *tdata,uint16_t tnum){ //等待发送状态OK while(HAL_DMA_GetState(&hdma_usart1_tx) == HAL_DMA_STATE_BUSY) HAL_Delay(1); //发送数据 HAL_UART_Transmit_DMA(&huart1,tdata,tnum); } //发送字符串 void my_uart1_send_string(uint8_t *tdata){ //等待发送状态OK while(HAL_DMA_GetState(&hdma_usart1_tx) == HAL_DMA_STATE_BUSY) HAL_Delay(1); //发送数据 HAL_UART_Transmit_DMA(&huart1,tdata,strlen(tdata)); }
串口库函数中断接收
uint8_t my_uart1_redata=0; //开启串口接收中断 void my_uart1_enable_inpterr(){ //开启一次中断 HAL_UART_Receive_IT(&huart1,&my_uart1_redata,1); } //串口收到数据回调 void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){ if(huart->Instance == USART1)//判断串口号 { //发送 my_uart1_send_data(&my_uart1_redata,1); //开启一次中断 HAL_UART_Receive_IT(&huart1,&my_uart1_redata,1); } }
主函数
//开启中断 my_uart1_enable_inpterr(); //发送数据 my_uart1_send_data("1dongxiaodong_DMA_1\r\n",strlen("1dongxiaodong_DMA_1\r\n")); my_uart1_send_data("2dongxiaodong_DMA_2\r\n",strlen("2dongxiaodong_DMA_2\r\n")); my_uart1_send_string("3dongxiaodong_DMA_3\r\n");
七、 串口DMA收和发
(一)CubeMX配置
通用配置

中断开启

DMA发送设置
DMA接收设置,要注意这里是循环
(二)编程实现
收发函数原型
#include "string.h" extern DMA_HandleTypeDef hdma_usart1_tx; //发送数组数据 void my_uart1_send_data(uint8_t *tdata,uint16_t tnum){ //等待发送状态OK while(HAL_DMA_GetState(&hdma_usart1_tx) == HAL_DMA_STATE_BUSY) HAL_Delay(1); //发送数据 HAL_UART_Transmit_DMA(&huart1,tdata,tnum); } //发送字符串 void my_uart1_send_string(uint8_t *tdata){ //等待发送状态OK while(HAL_DMA_GetState(&hdma_usart1_tx) == HAL_DMA_STATE_BUSY) HAL_Delay(1); //发送数据 HAL_UART_Transmit_DMA(&huart1,tdata,strlen(tdata)); } uint8_t my_uart1_redata=0; //开启串口接收中断 void my_uart1_enable_inpterr(){ //开启一次中断 //HAL_UART_Receive_IT(&huart1,&my_uart1_redata,1); HAL_UART_Receive_DMA(&huart1,&my_uart1_redata,1);//设置接收缓冲区 } //串口收到数据回调 void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){ if(huart->Instance == USART1)//判断串口号 { //发送 my_uart1_send_data(&my_uart1_redata,1); //开启一次中断 //HAL_UART_Receive_IT(&huart1,&my_uart1_redata,1); } }
主函数使用
//初始化DMA接收 my_uart1_enable_inpterr(); //发送函数调用 my_uart1_send_data("1dongxiaodong_DMA_1\r\n",strlen("1dongxiaodong_DMA_1\r\n")); my_uart1_send_data("2dongxiaodong_DMA_2\r\n",strlen("2dongxiaodong_DMA_2\r\n")); my_uart1_send_string("3dongxiaodong_DMA_3\r\n");
八、printf实现
#include <stdio.h> int fputc(int ch,FILE *f) { uint32_t temp = ch; HAL_UART_Transmit(&huart1,(uint8_t *)&temp,1,0xFFFF); //huart1是串口的句柄 HAL_Delay(2); return ch; }
参考:
正点原子、洋桃电子

 浙公网安备 33010602011771号
浙公网安备 33010602011771号