

算法与数据结构 7 - 斜率优化
引入
斜率优化是一种优化动态规划时间复杂度的优化寄巧,能够极大降低算法的时间复杂度。
斜率优化的一般形式是:
。
这种状态转移方程暴力计算显然是 \(\mathcal{O}(n^2)\) 的,那么能不能快一些呢?
转化斜率
首先去掉丑陋的 \(\min / \max\)得到:
,接着考虑存在决策点 \(j_1,j_2\) 使得 \(j_2\) 优于 \(j_1\)。这里以原式是 \(\min\) 为例。
\(j_2\) 优于 \(j_1\) 的充要条件时
。令
\(y_p=d_p\),\(k'_p=a_p\),\(x_p=b_p\),则有
可以看到上式形似直线斜率。
数形结合
设 \(k_p=-k'_p\),则 $$k_i < \frac{y_{j_2} - y_{j_1}}{x_{j_2} - x_{j_1}}$$。将 \((x_p,y_p)\) 看成平面直角坐标系上的决策点。
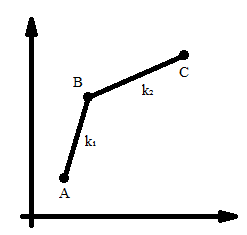
假设坐标系上存在 \(A\),\(B\),\(C\) 三个决策点,考虑将 DP 转移方程变形为 \(f_i - c_i - C = a_i \times b_j + d_j\) 即 \(B_i=k_i \times x_j + y_j\),\(AB\) 斜率为 \(k_1\),\(BC\) 斜率为 \(k_2\)。
显然 \(B_i\) 最小时最优。当 \(k_1 > k_2\) 时,
若 \(k_0 > k_1\),则 \(B\) 优于 \(A\),否则 \(A\) 优于 \(B\);若 \(k_0 > k_2\),则 \(C\) 优于 \(B\),否则 \(B\) 优于 \(C\)。
于是有三种情况:
- \(k_0 > k_1 > k_2\),此时 \(C\) 最优;
- \(k_1 > k_0 > k_2\),此时 \(A\) 最优;
- \(k_1 > k_2 > k_0\),此时 \(A\) 最优;
因此 \(B\) 不可能最优。
同理可得,当 \(k_1 > k_2\) 时,\(B\) 也不可能最优。
因此,所有的最优决策点构成上/下凸壳:
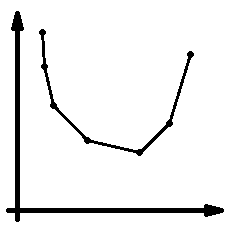
下文以下凸壳为例。现在需要求出 \(f_i\),目前已知 \(k_i\):
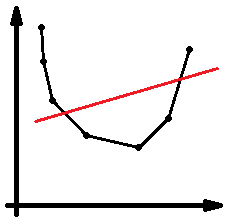
瞪眼法可看出最优决策点为切线位置:
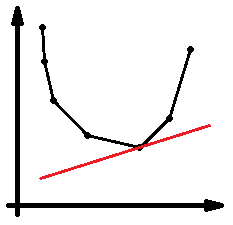
因此二分即可。计算完毕后向凸壳中插入决策点,可以使用李超树、CDQ 分治和平衡树解决,在此先暂时跳过。
特殊情况
\(k_i\) 、\(x_i\) 单调
因为 \(x_i\) 单调,所以不需要二分求决策点。可以使用单调队列维护决策点集,在查找时直接弹出不合法的决策点,因为被弹出的决策点不再可能被使用。此时由于每个决策点只进队一次,时间复杂度降为 \(\mathcal{O}(n)\)。
\(k_i\) 单调
由于 \(k_i\) 单调,可以二分求插入位置。
本文来自博客园,作者:cwkapn,转载请注明原文链接:https://www.cnblogs.com/cwkapn/p/18844681

 浙公网安备 33010602011771号
浙公网安备 33010602011771号