麦克风均匀线阵(ULA)计算导向矢量(steering vector)
麦克风均匀线阵(ULA)计算导向矢量(steering vector)
本文使用python实现麦克风均匀线阵的导向矢量的计算
公式参考Sharon Gannot 的综述:
[1] S. Gannot, E. Vincent, S. Markovich-Golan, and A. Ozerov, “A Consolidated Perspective on Multimicrophone Speech Enhancement and Source Separation,” IEEE/ACM Trans. Audio Speech Lang. Process., vol. 25, no. 4, pp. 692–730, Apr. 2017, doi: 10.1109/TASLP.2016.2647702.
麦克风均匀线阵如下图(图片来自于[1])所示:
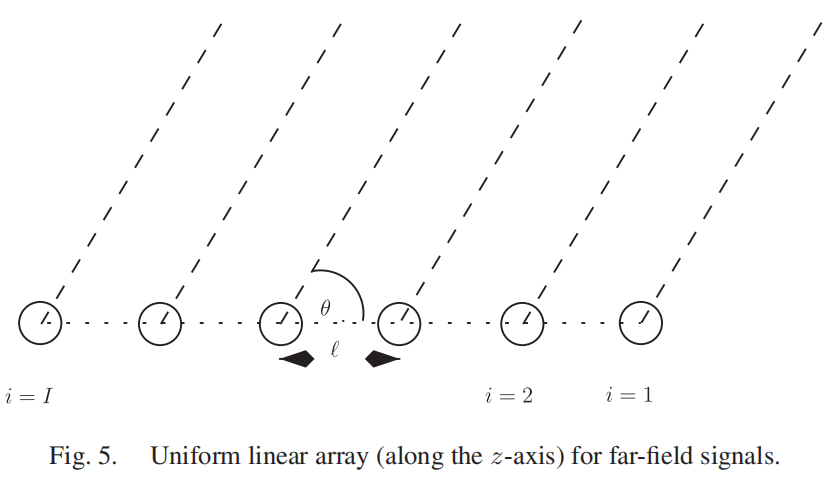
计算steering vector 的公式如下
\[\mathbf{d}\left( \theta ,\lambda \right) =\left[ 1,e^{-2j\pi \frac{\ell}{\lambda}\cos \left( \theta \right)},...,e^{-2j\pi \left( I-1 \right) \frac{\ell}{\lambda}\cos \left( \theta \right)} \right]^T
\]
上式中,\(I\) 为麦克风数量,\(\ell\) 为麦克风间距,\(\lambda=\frac{c}{\nu_{f}}\)为波长,\(c\)为声速,\(\nu_{f}\) 为实际频率,即\(\nu_f=\frac{f}{F}f_s\),\(f\in\{0,...,F-1\}\),\(F\)为FFT长度,\(f_s\)为采样频率。
import numpy as np
# |
# o 3
# / o 2
# / / o 1 mic #
# / /|
# / |
# / θ|
def cal_theta(ref_pos, src_pos):
if ref_pos[0, 2] == src_pos[0, 2]:
theta = np.arccos((ref_pos[0, 1]-src_pos[0, 1])/np.linalg.norm(ref_pos-src_pos))
return theta
else:
print('ref_pos\'s z-axis coordinate is not equal to src_pos z-axis coordinate!')
if __name__ == '__main__':
# this code calculates the degree between reference position and source position
ref_pos = np.array([3, 3, 1.2]).reshape(1, 3)
src_pos = np.array([1.05, 1.95, 1.2]).reshape(1, 3)
theta = cal_theta(ref_pos, src_pos)
theta = 6*np.pi/12
print(theta*180/np.pi, end='')
print('°')
c = 343 # sound speed m/s
mic_num = 4
mic_space = 0.08
fs = 16000
fft_size = 1024
SV_mat = np.zeros((mic_num, fft_size//2 + 1), dtype=complex) #
for f in range(int(fft_size/2 + 1)):
vf = f / fft_size * fs
if vf == 0:
for m in range(mic_num):
SV_mat[m, f] = np.exp(-2j * np.pi * m * 0 * np.cos(theta))
else:
lamb = c / vf
for m in range(mic_num):
SV_mat[m, f] = np.exp(-2j*np.pi*m*mic_space/lamb*np.cos(theta))
# SV_mat = SV_mat/np.linalg.norm(SV_mat, axis=0) # normalize

 浙公网安备 33010602011771号
浙公网安备 33010602011771号