


一、树
1.基本概念
- 用来模拟具有树状结构性质的数据集合。
- 连接的节点具有父子关系,和图相比树能表示节点间的层次关系。
2、名词解释
- 节点的度:一个节点子树的个数
- 树的度:一个树中,所有节点的度的最大值就成为树的度
- 根节点:树的第一层的节点,也是没有双亲的节点
-
高度/深度:从根开始到最多层次,最底下的节点,其长度就成为树的高度,根的高度为1
3、二叉树
- 其每一个节点的度都<=2。
- 在二叉树第i层最多有2^(i-1)个节点。
- 深度为k的二叉树最多有2^k-1个节点。
- 对于任何一棵二叉树T,叶子节点数为n0,度为2的节点数为n2则n0=n2 + 1。
二叉树的特殊类型有:满二叉树、完全二叉树、二叉查找树、平衡二叉查找树(AVL树)、红黑树
3.1 满二叉树
除了最后一层,其它层的结点都有两个子结点。
- 在二叉树第i层有2^(i-1)个节点。
- 深度为k的二叉树有2^k-1个节点。
3.2 完全二叉树
除了最后一层结点,其它层的结点数都达到了最大值;同时最后一层的结点都是按照从左到右依次排布。
- 具有n个节点的完全二叉树的深度为[log2n] + 1,
- 如果对一棵有n个节点的完全二叉树(深度为[log2n] + 1)的节点按层序编号,对任一节点i(1<=i<=n)有:
- 如果i=1,则i是根节点,无双亲;否则其双亲是 i/2.
- 如果2i>n,则节点i无左孩子(节点i为叶节点);否则左孩子为2i.
- 如果2i+1>n,则节点i无右孩子(节点i为叶子节点);否则右孩子为2i+1.
3.3 二叉查找树
是一棵空树,或者:若它的左子树不空,则左子树上所有结点的值均小于它的根结点的值;若它的右子树不空,则右子树上所有结点的值均大于它的根结点的值;它的左、右子树也分别为二叉排序树。
3.4 平衡二叉查找树(AVL树)
- 平衡二叉树的产生是为了解决二叉排序树在插入时发生线性排列,退化成链表的现象。
四种旋转方式:
(1)LR型:左叶子结点插入右子节点
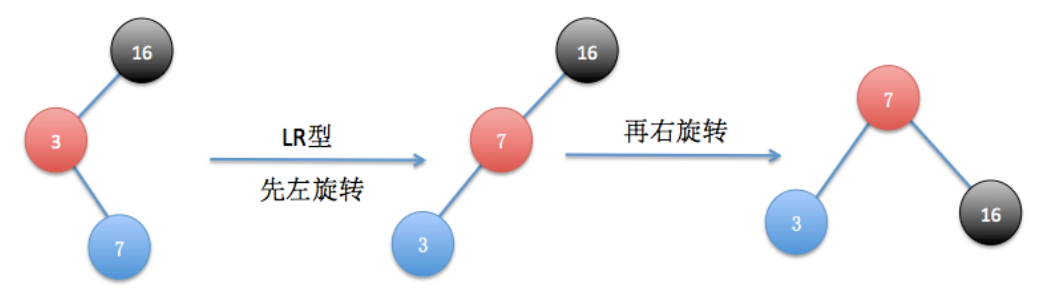
先通过以3为旋转中心,进行左旋转,结果如图所示,然后再以7为旋转中心进行右旋转,旋转后恢复平衡了。
(2)LL型:左叶子结点插入左子节点
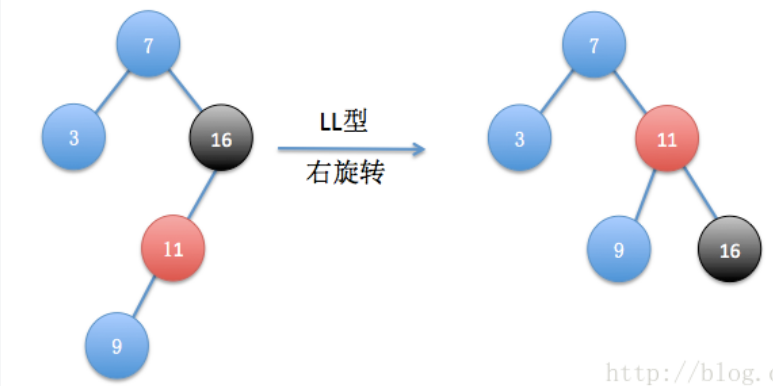
只用经过一次右旋转
(3)RR型:右叶子结点插入右子节点
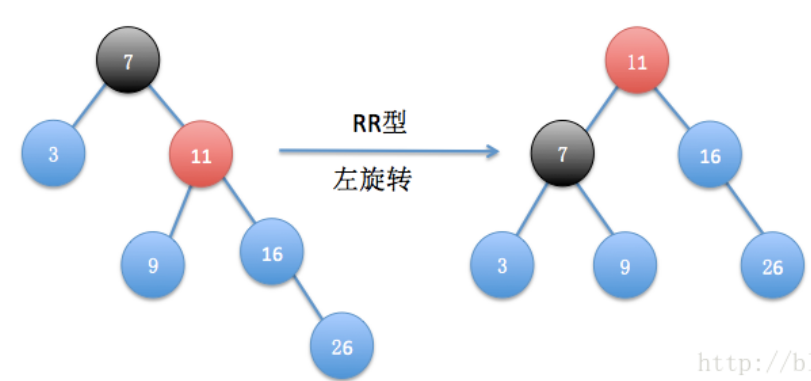
对插入节点的父节点进行左旋转
(4)RL型:
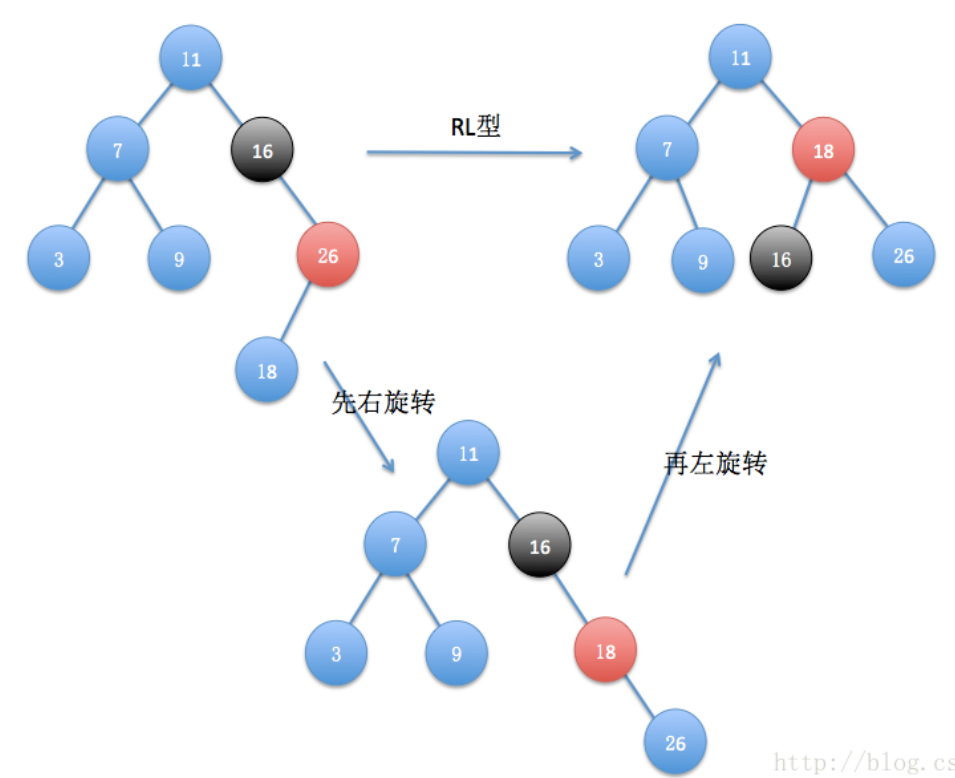
对插入节点先右旋转再左旋转
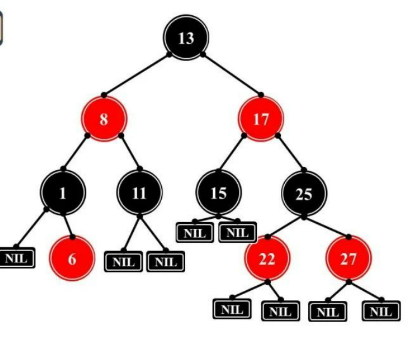
3.5 红黑树
红黑树是一种自平衡的二叉搜索树,它保证了每个节点都有一个颜色属性,可以是红色或者黑色,并且满足以下五个性质:
- 根节点是黑色的。
- 每个叶子节点(NULL节点)是黑色的。
- 如果一个节点是红色的,则其子节点必须是黑色的。
- 对于每个节点,从该节点到其所有后代叶子节点的简单路径上,均包含相同数目的黑色节点。
- 空节点被视为黑色。
这些性质确保了红黑树具有较好的平衡性和搜索效率,在插入、删除等操作时能够保持树的平衡,使得最坏情况下的时间复杂度为 O(log n)。
与AVL树的区别:
1、红黑树的插入和删除操作效率比AVL树高,因为红黑树在插入和删除节点时只需进行 O(1) 次数的旋转和变色操作,即可保持基本平衡状态,而不需要像 AVL 树一样进行 O(logn) 次数的旋转操作。
2、红黑树并不追求严格的平衡,而是大致的平衡。正因如此,红黑树的查询效率稍有下降,因为红黑树的平衡性相对较弱,可能会导致树的高度较高,
3、多叉树
B树和B+树都是一种多叉平衡搜索树
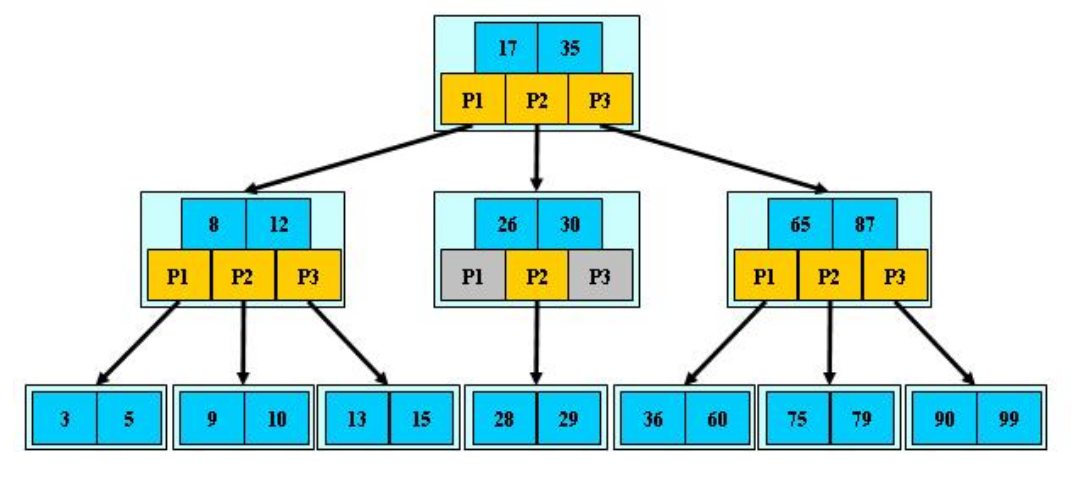
3.1B树
B树的定义如下,假设有M个子节点:
1.定义任意非叶子结点最多只有M个儿子;且M>2;
2.根结点的儿子数为[2, M];
3.除根结点以外的非叶子结点的儿子数为[M/2, M];
4.每个结点存放至少M/2-1(取上整)和至多M-1个关键字;(至少2个关键字)
5.非叶子结点的关键字个数=指向儿子的指针个数-1;
6.非叶子结点的关键字:K[1], K[2], …, K[M-1];且K[i] < K[i+1];
7.非叶子结点的指针:P[1], P[2], …, P[M];其中P[1]指向关键字小于K[1]的子树,P[M]指向关键字大于K[M-1]的子树,其它P[i]指向关键字大于K[i-1],小于 K[i]的子树;
8.所有叶子结点位于同一层;
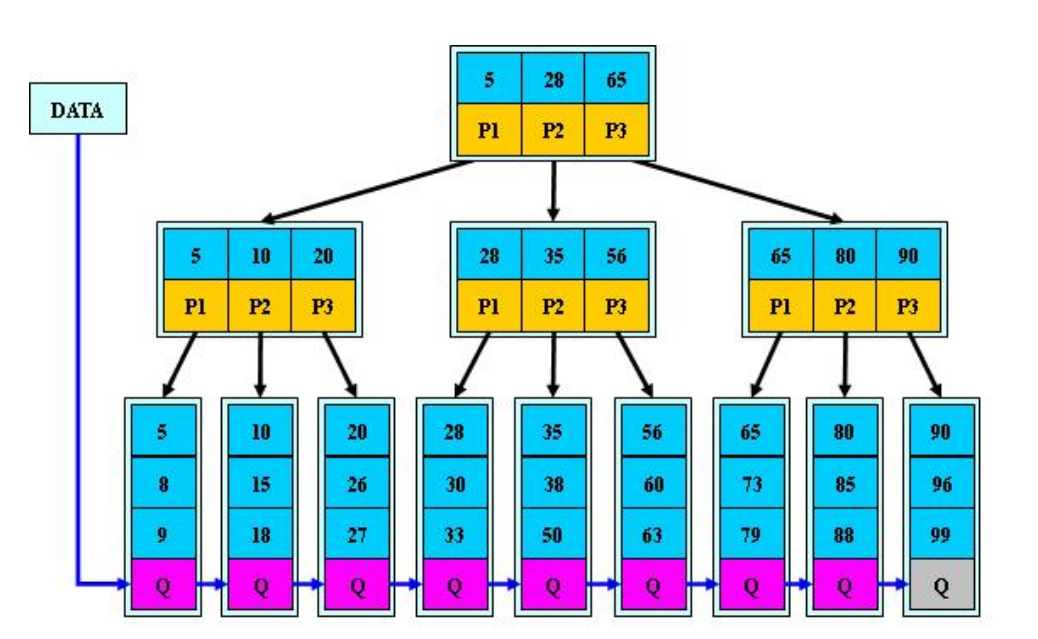
3.2 B+树
其定义基本与B树同,除了:
1.非叶子结点的子树指针与关键字个数相同;
2.非叶子结点的子树指针P[i],指向关键字值大于等于K[i]小于K[i+1] (左闭右开)的子树
5.为所有叶子结点增加一个链指针;
6.所有关键字都在叶子结点出现;
区别:
| B树 | B+树 | |
| 存储结构 | 每个节点既存储数据,也存储子节点指针 | 非叶子节点只存储子节点指针,数据只存储在叶子节点中, b+树的中间节点不保存数据,所以磁盘页能容纳更多节点元素,更“矮胖” |
| 叶子节点 | 叶子节点可以包含数据,也可以不包含数据 | 叶子节点必须包含全部数据,且按照键值大小排序形成一个链表。 |
| 遍历方式 | 为了遍历全部数据,需要对每个节点进行遍历 | B+树可以通过遍历叶子节点的链表来获取所有数据 |
| 范围查询 | 范围查询需要对每个节点进行遍历,相对较慢 | 通过遍历叶子节点的链表来快速定位并返回符合条件的数据 |
| 关键字个数 | 非叶子结点的关键字个数=指向儿子的指针个数-1 | 非叶子结点的子树指针与关键字个数相同 |
| 子节点指针的范围 | 开区间,P[i]指向关键字大于K[i-1],小于 K[i]的节点 | 左闭右开,P[i]指向关键字值大于等于K[i]小于K[i+1] (左闭右开)的节点 |
二、堆
-
堆在物理层面上,表现为一组连续的数组区间;将整个数组看作是堆。
堆在逻辑结构上,一般被视为是一颗完全二叉树。
- 对于任意一个父节点的序号n来说(这里n从0算),它的子节点的序号一定是2n+1,2n+2,因此可以直接用数组来表示一个堆。
- 堆中某个节点的值总是不大于或不小于其父节点的值。将根节点最大的堆叫做最大堆或大根堆,根节点最小的堆叫做最小堆或小根堆。
public class HeapTest {
/**
* 小堆的向下调整,要求满足向下调整的前提
* @param array 堆所在的数组
* @param size 前 size 个元素视为堆中的元素
* @param index 要调整位置的下标
*/
public static void shiftDown(long[] array, int size, int index) {
// 只要看到 int 类型的,基本就是下标或者个数,不是元素
// 这里直接 while(true)即可
// while (2 * index + 1 < size) { 如果这么写,下面就不用再进行叶子的判断
while (true) {
// 1. 判断 index 所在位置是不是叶子
// 逻辑上,没有左孩子一定就是叶子了(因为完全二叉树这个前提)
int left = 2 * index + 1;
if (left >= size) {
// 越界 -> 没有左孩子 -> 是叶子 -> 调整结束
return; // 循环的出口一:走到的叶子的位置
}
// 2. 找到两个孩子中的最值【最小值 via 小堆】
// 先判断有没有右孩子
int right = left + 1; // right = 2 * index + 2
int min = left; // 假设最小值就是左孩子,所以 min 保存的最小值孩子所在的下标
if (right < size && array[right] < array[left]) {
// right < size 必须在 array[right] < array[left] 之前,不能交换顺序
// 因为先得确定有右孩子,才有比较左右孩子的意义
// 有右孩子为前提的情况下,然后右孩子的值 < 左孩子的值
min = right; // min 应该是右孩子所在的下标
}
// 3. 将最值和当前要调整的位置进行比较,判断是否满足堆的性质
if (array[index] <= array[min]) {
// 当前要调整的结点的值 <= 最小的孩子值;说明这里也满足堆的性质了,所以,调整结束
return; // 循环的出口一:循环期间,已经满足堆的性质了
}
// 4. 交换两个值,物理上对应的就是数组的元素交换 min 下标的值、index 下标的值
long t = array[index];
array[index] = array[min];
array[min] = t;
// 5. 再对 min 位置重新进行同样的操作(对 min 位置进行向下调整操作)
index = min;
}
}
public static void main(String[] args) {
long[] array = { 27, 15, 19, 18, 28, 34, 65, 49, 25, 37 };
shiftDown(array,9,0);
}
}
2、堆的插入
堆的插入总共需要两个步骤:
1️⃣. 先将元素放入到最后
2️⃣. 将最后新插入的节点向上调整,直到满足堆的性质 ;


1 // 注意:上图是按照大堆来调整的,注意比较方式 2 public void shiftUp(int child) { 3 // 找到child的双亲 4 int parent = (child - 1) / 2; 5 6 while (child > 0) { 7 // 如果双亲比孩子大,parent满足堆的性质,调整结束 8 if (array[parent] > array[child]) { 9 break; 10 } 11 else{ 12 // 将双亲与孩子节点进行交换 13 int t = array[parent]; 14 array[parent] = array[child]; 15 array[child] = t; 16 17 // 小的元素向下移动,可能到值子树不满足对的性质,因此需要继续向上调增 18 child = parent; 19 parent = (child - 1) / 1; 20 } 21 } 22 }
3. 堆的删除(poll)
具体如下:( 注意:堆的删除一定删除的是堆顶元素。)
1️⃣. 将堆顶元素对堆中最后一个元素交换;
2️⃣. 将堆中有效数据个数减少一个;
3️⃣. 对堆顶元素进行向下调整;
1 public long poll() { 2 // 返回并删除堆顶元素 3 if (size < 0) { 4 throw new RuntimeException("队列是空的"); 5 } 6 7 long e = array[0]; 8 9 // 用最后一个位置替代堆顶元素,删除最后一个位置 10 array[0] = array[size - 1]; 11 array[size - 1] = 0; // 0 代表这个位置被删除了,不是必须要写的 12 size--; 13 14 // 针对堆顶位置,做向下调整 15 shiftDown(array, size, 0); 16 17 return e; 18 }
三、散列表
哈希冲突处理方式有很多,常用的包括以下几种:
开放地址法(也叫开放寻址法):这时对计算出来的地址进行一个探测再哈希,比如往后移动一个地址,如果没人占用,就用这个地址。
再哈希法:在产生冲突之后,使用关键字的其他部分继续计算地址,如果还是有冲突,则继续使用其他部分再计算地址。这种方式的缺点是时间增加了。
链地址法:链地址法其实就是对Key通过哈希之后落在同一个地址上的值,做一个链表。其实在很多高级语言的实现当中,也是使用这种方式处理冲突的。
公共溢出区:这种方式是建立一个公共溢出区,当地址存在冲突时,把新的地址放在公共溢出区里。
四、图
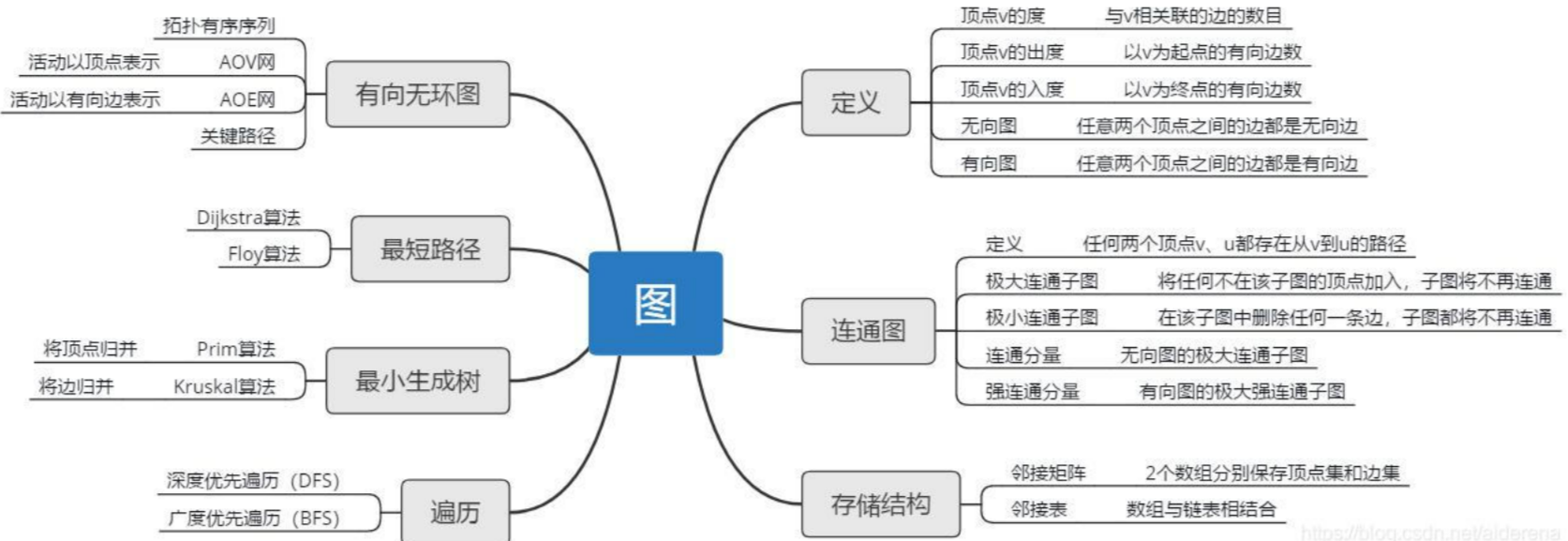
完全无向图:若有n个顶点的无向图有n(n-1)/2 条边, 则此图为完全无向图。
完全有向图:有n个顶点的有向图有n(n-1)条边, 则此图为完全有向图。
如果对于图中任意两个顶点都是连通的,则成G是连通图:
极大联通子图:加入任何一个节点,子图将不再联通
最小联通子图:删除任何一条边,子图将不再联通
有向的连通图称为强连通图。
1、邻接矩阵
邻接矩阵用两个数组保存数据。一个一维数组存储图中顶点信息,一个二维数组存储图中边或弧的信息。
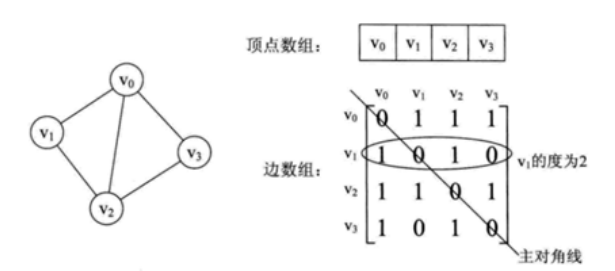
无向图中二维数组是个对称矩阵。
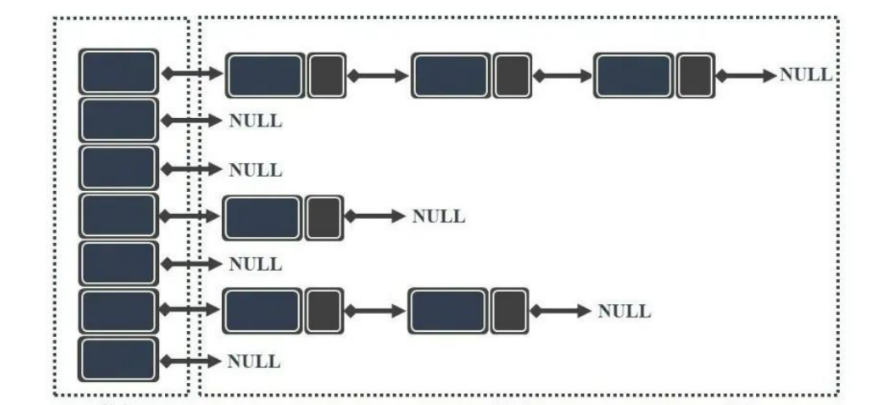
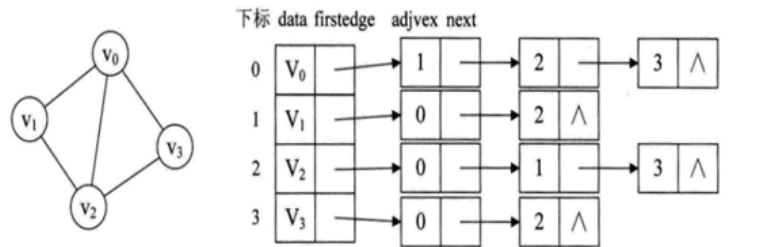
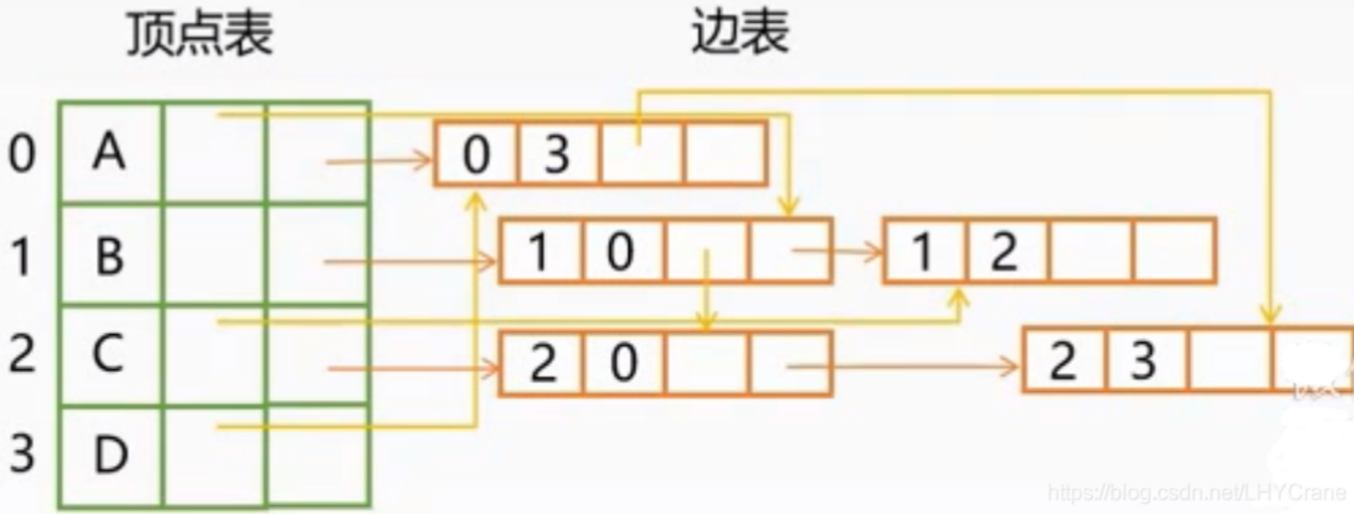
2、邻接表
邻接表:数组和链表相结合的存储方法为邻接表。
-
图中顶点用一个一维数组存储。
-
图中每个顶点Vi的所有邻接点构成一个线性表。
有向图也可以用邻接表,出度表叫邻接表,入度表尾逆邻接表。
3、十字链表
将有向图的邻接表和逆邻接表结合起来得到的。
1、重新定义表头结构
只需对表头结构稍加改动,增加firstIn和firstOut两个指针域,分别指向以A为弧尾和以A为弧头的第一个顶点地址。
2、重新定义节点结构
边表每个结点结构如下:
tailvex:弧起点的下标 headvex:弧终点的下标 headlink:入边指针 taillink:出边指针
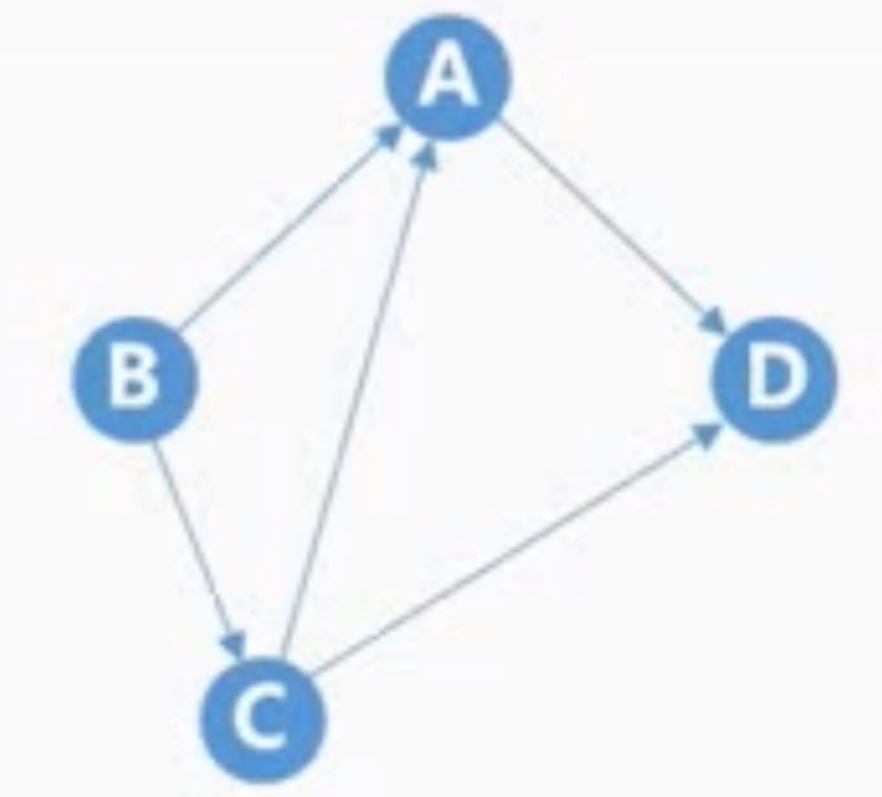
DFS:深度优先遍历,一般用堆或栈来辅助实现DFS算法。其过程简要来说是对每一个可能的分支路径深入到不能再深入为止,如果遇到死路就往回溯,回溯过程中如果遇到没探索过的支路,就进入该支路继续深入。
搜索图所有节点的DFS代码如下:
1 import java.util.*; 2 3 public class Graph { 4 private int V; // 图中节点数 5 private LinkedList<Integer> adj[]; // 邻接表表示图 6 7 public Graph(int v) { 8 V = v; 9 adj = new LinkedList[v]; 10 for (int i = 0; i < v; ++i) 11 adj[i] = new LinkedList(); 12 } 13 14 public void addEdge(int v, int w) { 15 adj[v].add(w); 16 } 17 18 public void DFS(int s) { 19 boolean visited[] = new boolean[V]; 20 Stack<Integer> stack = new Stack<Integer>(); 21 22 visited[s] = true; 23 stack.push(s); 24 25 while (!stack.isEmpty()) { 26 s = stack.pop(); 27 System.out.print(s + " "); 28 29 Iterator<Integer> i = adj[s].listIterator(); 30 while (i.hasNext()) { 31 int n = i.next(); 32 if (!visited[n]) { 33 visited[n] = true; 34 stack.push(n); 35 } 36 } 37 } 38 } 39 40 public static void main(String args[]) { 41 Graph g = new Graph(4); 42 43 g.addEdge(0, 1); 44 g.addEdge(0, 2); 45 g.addEdge(1, 2); 46 g.addEdge(2, 0); 47 g.addEdge(2, 3); 48 g.addEdge(3, 3); 49 50 System.out.println("Depth First Traversal (starting from vertex 2)"); 51 g.DFS(2); 52 } 53 }
深度优先搜索应用:先序遍历,中序遍历,后序遍历
BFS:广度优先遍历,BFS是从根节点开始,沿着树(图)的宽度遍历树(图)的节点。如果所有节点均被访问,则算法中止。一般用队列数据结构来辅助实现。
广度优先搜索应用:层序遍历、最短路径
1 import java.util.*; 2 3 public class Graph { 4 private int V; // 图中节点数 5 private LinkedList<Integer> adj[]; // 邻接表表示图 6 7 public Graph(int v) { 8 V = v; 9 adj = new LinkedList[v]; 10 for (int i = 0; i < v; ++i) 11 adj[i] = new LinkedList(); 12 } 13 14 public void addEdge(int v, int w) { 15 adj[v].add(w); 16 } 17 18 public void BFS(int s) { 19 boolean visited[] = new boolean[V]; 20 LinkedList<Integer> queue = new LinkedList<Integer>(); 21 22 visited[s] = true; 23 queue.add(s); 24 25 while (queue.size() != 0) { 26 s = queue.poll(); 27 System.out.print(s + " "); 28 29 Iterator<Integer> i = adj[s].listIterator(); 30 while (i.hasNext()) { 31 int n = i.next(); 32 if (!visited[n]) { 33 visited[n] = true; 34 queue.add(n); 35 } 36 } 37 } 38 } 39 40 public static void main(String args[]) { 41 Graph g = new Graph(4); 42 43 g.addEdge(0, 1); 44 g.addEdge(0, 2); 45 g.addEdge(1, 2); 46 g.addEdge(2, 0); 47 g.addEdge(2, 3); 48 g.addEdge(3, 3); 49 50 System.out.println("Breadth First Traversal (starting from vertex 2)"); 51 g.BFS(2); 52 } 53 }
