The option-critic architecture(上)
Abstract
时间抽象是强化学习中扩大学习和规划的关键。虽然计划与时间扩展的行动是众所周知的,但从数据中自主地创建这样的抽象仍然具有挑战性。我们在option框架内解决这个问题[Sutton,Precup&Singh,1999;Precup,2000]。我们推导了option的策略梯度定理,并提出了一种新的 \(opiton\text{-}critic\) 体系结构,它能够同时学习 option 的内部策略和终止条件,并且不需要提供任何额外的奖励或子目标。在离散和连续环境下的实验结果表明了该框架的灵活性和高效性。
Temporal abstraction:
Introduction
时间抽象允许表示发生在不同时间尺度上的行为过程的知识。
How to understand? Option?
在强化学习中,option(Sutton、Precup和Singh 1999;Precup 2000)为定义此类行动方案以及与之无缝地学习和规划提供了框架。在过去的15年里,自主地发现时间抽象一直是广泛研究的主题(McGovern和Barto 2001;Stolle和Precup 2002;Menache、Mannor和Shimkin 2002;S¸ims¸ek和Barto 2009;Silver和Ciosek 2012),但是可以自然地与连续状态和/或动作空间一起使用的方法直到最近才开始变得可行(Konidaris等人。2011年;Niekum 2013年;Mann、Mannor和Precup 2015年;Mankowitz、Mann和Mannor 2016年;Kulkarni等人。2016年;V ezhnevets等人。2016年;Daniel等人。2016年)。
现有的大部分工作都集中在寻找子目标(代理应该达到的有用状态)以及随后学习实现这些目标的策略。这一想法导致了有趣的方法,但因为他们的 "combinatorial" flavor 也很难扩大规模,。此外,与子目标相关的策略学习在数据和计算时间方面可能代价很大;在最坏的情况下,它可能与解决整个任务一样昂贵。
我们提出了另一种观点,它模糊了发现option问题和学习option问题之间的界限。基于policy gradient 定理(Sutton等人。2000年),我们得到了一些新的结果,这些结果使得 \(intra-option\) 政策和终止函数的逐步学习过程能够与对它们的策略同时进行。在离散或连续的状态空间和动作空间下,这种方法可以自然地处理线性和非线性函数逼近器。当从单个任务中学习时,现有的学习option方法要慢得多:在类似的任务中重复使用已学习的选项,这是很大的好处。相比之下,我们证明了我们的方法能够在单个任务中成功地学习选项,而不会导致任何减速,同时仍然为转移学习提供好处。
- 我们首先回顾与我们工作的两个主要组成部分相关的背景:policy gradient method 和 option。
- 然后我们描述了我们方法的核心思想:the intra-option policy 和 termination gradient theorems。附加技术细节见附录。
- 实验结果表明,我们的方法能够有效地学习有意义的时间扩展行为。与其他方法不同,我们只需要指定所需选项的数量;不需要有子目标、额外奖励、描述demonstrations、多重问题或任何其他特殊调整(但是,如果需要,该方法可以利用伪奖励函数)。据我们所知,这是第一个端到端的学习方法,可以以相当的效率扩展到非常大的领域。
Preliminaries and Notation
一个马尔可夫决策过程包括:
为了方便起见,我们发展了假设离散状态和作用集的思想。然而,我们的结果扩展到连续空间使用通常的测量理论假设(我们的一些经验结果是在连续任务)。A (Markov Stationary) \(policy\) 是以状态为条件在动作上的概率分布:$$\pi:\mathcal{S}\times\mathcal{A}\to[0,1]$$。
在discount probelem中,策略\(\pi\)的值函数定义为期望:
其动作值函数为:
其中\(\gamma\in[0,1)\),为折扣因子。
一个策略 \(\pi\) 对给定的动作值函数 \(Q\) 是贪婪的,如果\(\pi(s,a)>0\)当且仅当\(a=\mathop{\arg\min}_{a'}Q(s,a')\)
在离散MDP中,至少有一个最优策略对其自身的作用值函数是贪婪的。
Policy gradient methods
policy gradient 方法(Sutton等人。2000;Konda和Tsitsiklis 2000)通过执行随机梯度下降来优化给定参数化随机策略族 \(\pi_\theta\) 的性能目标,来解决寻找一个好策略的问题。policy gradient 定理(Sutton等人。2000)提供了平均奖励和折扣奖励目标相对于θ的梯度的表达式。
在discounted 的设置下,目标是根据指定的开始状态(或分布)来定义的:
Policy gradient 定理表明:
\(\mu_{\pi\theta}(s|s_0)\) 是从 \(s_0\) 开始沿轨道的状态的折扣权重。
在实际应用中,政策梯度是沿着 on-policy 上的平稳分布从样本中估计出来的。(Thomas 2014)表明,忽略此平稳分布中的折扣因子会使通常的政策梯度估计有偏差。然而,纠正这种差异也会降低数据效率。为了简单起见,我们建立在(Sutton et al并根据(Thomas 2014)讨论如何扩展我们的结果。
The options framework
The options framework(Sutton、Precup和Singh 1999;Precup 2000)将时间扩展行动的概念正式化。
我们同时假设所有的options在任何地方都可以使用,即 \(\forall s\in\mathcal{S},\forall \omega\in\Omega:s\in\mathcal{I}_\omega\) ,这是大多数option发现算法中的一种假设。我们将在最后一节讨论如何消除这种假设。(Sutton,Precup,and Singh 1999;Precup 2000)表明,赋予一组option的MDP成为一个半马尔可夫决策过程(Puterman 1994,第11章),它在 \(V_\Omega(s)\) 和 option-value function \(Q_\Omega(s,\omega)\) 上具有对应的最优值函数。mdp的学习和规划算法在这种情况下有对应的算法。然而,底层MDP的存在提供了并行学习许多不同选项的可能性:这就是 \(intra\text{-}option\ learning\) 的思想,我们在工作中利用了这种思想。
Learning Options
我们对学习选择问题采取了持续的观点。在任何时候,我们都希望将所有可用的经验提炼到我们系统的每个组成部分:value function, policy over options, intra-option policies and termination functions 价值函数和期权政策、期权内政策和终止函数。为了实现这一目标,我们重点学习期权策略和终止函数,假设它们是用可微参数化函数逼近器表示的。
differentiable parameterized function approximators 可微参数化函数逼近器:
有很多 differentiable function approximators,如:
- 线性模型(Linear combinations of features)
- 神经网路(Neural network)
- 决策树(Decision tree)
- 最近邻(Nearest neighbour)
- ...
我们考虑了 \(call-and-return\) 执行模型,在该模型中,agent根据其在 \(\pi_\Omega\) 的策略选择option \(\omega\) ,然后遵循其 \(intra-option\) policy \(\pi_\omega\)直到终止(由 \(\beta_\omega\) 决定),此时该过程重复进行。
设 \(\pi_{\omega,\theta}\) 表示由θ参数化的option ω的intra-option policy,\(\beta_{\omega,\vartheta}\) 是由ϑ参数化的ω的终止函数。我们提出了两个新的学习option的结果,得到了作为蓝图的政策梯度定理(萨顿等人。2000年)。这两个结果都是在假设目标是学习使当前任务的预期收益最大化的option的前提下得出的。然而,如果要在目标函数中添加额外的信息,只要它以加性可微函数的形式出现,就可以很容易地做到这一点功能。
additive differentiable function:
假设我们的目标是优化在所有从指定状态 \(s_0\) 和option \(\omega_0\) 的轨迹上期望的discounted return,然后
7.24:此公式相对于式(a-1)同为 \(\rho()\) ,应该同样理解为\(s_0\) 的分布
请注意,此return取决于policy over options,以及option policies和termination函数的参数。我们将取这个目标相对于θ和ϑ的梯度。为了做到这一点,我们将使用类似于 \(intra-option\) 学习中使用的方程(Sutton,Precup,and Singh 1999,第8节)。具体来说,option-value 函数的定义可以写成:
首先可以很直观地看出此方法不是将option视为不可观察的黑盒,而是可以观察其内部更基础的action。基于此上式便可以理解为,option-value function就是基于状态s,option内策略得到值的期望,所以 \(Q_U()\) 从这个表达式推断,就可以推测是用来描述option内的state-action值函数,相当于是option的qlearning过程的值函数
\(Q_U:\mathcal{S}\times\Omega\times\mathcal{A}\to\mathbb{R}\) 是在state-option对的环境中执行action的值:
通过文章内的描述可以得知之前的推断是正确的,但是完全理解为option内的q-learning还是不妥
注意,\((s,ω)\)对导致了一个扩大的状态空间,参见(Levy和Shimkin 2011)。但是,我们不会显式地处理这个空间;它只用于简化推导。函数\(U:\Omega\times\mathcal{S}\to\mathbb{R}\)称为到达时的option-value函数(Sutton、Precup和Singh 1999,方程20)。
进入状态 \(s'\) 时执行 \(ω\) 的值由下式给出:
Between MDPs and semi-MDP中的表达式为:\(U(s,o)=(1-\beta(s))Q(s,o)+\beta(s)\mathop{\max}_{o'\in\mathcal{O'}}Q(s,o')\)
\(U(\omega,s')\) 的含义也即高亮——进入状态 \(s'\) 时执行 \(\omega\) 的值
\(P(s'|s,a)\) 指(s,a)时s'的概率,所以\(\sum_{s'}P(s'|s,a)U(\omega,s')\)即 \(\mathbb{E}[\omega|s,a]\)
请注意, \(Q_U\) and \(U\) 都依赖于θ和ϑ,但为了清楚起见,我们不在符号中包含它们。导出策略梯度所需的最后一个要素是Markov链,沿着该链可以估计性能度量。自然的方法是考虑在增广状态空间中定义的链,因为state-option对现在在通常的Markov链中扮演regular state的角色。如果option \(\omega_t\) 已经启动或在状态st的时间t执行,则一步中转换到 \((s_{t+1},ω_{t+1})\) 的概率为:
显然,(4)给出的过程是均匀的。在温和的条件下,且期权无处不在,它实际上是遍历的,并且在state-option对上存在唯一的稳态分布(stationary distribution)。
\(\mathbb{1}_{\omega_t=\omega_{t+1}}\) 的含义:简单理解应为 \(\omega_t=\omega_{t+1}\) 为1,不等则为0
所以对(4)的理解应为:*我将原文中的一处()改为了[]更有助于观察
整个的one-step概率公式为: intra-option策略在\(s_t\)时选择\(a\)的概率 乘以 \((s_t,a)\to s_{t+1}\)的转移概率 乘以 option变化的概率 之和
其中option变化的概率包括两部分:当 \(\omega_t\neq\omega_{t+1}\) 时,,即**option在\(s_{t+1}\) 时终止 并由上层策略 \(\pi_\Omega\) 选择了 \(\omega_{t+1}\) **;当 \(\omega_t=\omega_{t+1}\) 时,即 在 \(s_{t+1}\) 不终止仍为 \(\omega_t\) 的概率
稳态分布:
假设intra-option policies的参数 \(\theta\) 是随机可微的,我们现在将计算expected discounted return的梯度。从式(1,2)可以得到:
这一步的推导非常简单,就是直接展开
\[\because Q_\Omega(s,\omega)=\sum_a\pi_{\omega,\theta}(a|s)Q_U(s,\omega,a)\\ \therefore \frac{\partial Q_\Omega(s,\omega)}{\partial\theta}=\sum_a\left(\frac{\partial\pi_{\omega,\theta}(a|s)}{\partial\theta}Q_U(s,\omega,a)+\pi_{\omega,\theta}(a|s)\frac{\partial Q_U(s,\omega,a)}{\partial\theta}\right)\\ \because Q_U(s,\omega,a)=r(s,a)+\gamma\sum_{s'}P(s'|s,a)U(\omega,s')\\ \therefore \frac{\partial Q_U(s,\omega,a)}{\partial \theta}=\gamma\sum_{s'}P(s'|s,a)\frac{\partial U(\omega,s')}{\partial\theta} \]\[\frac{\partial Q_\Omega(s,\omega)}{\partial\theta}=\sum_a\frac{\partial\pi_{\omega,\theta}(a|s)}{\partial\theta}Q_U(s,\omega,a) + \sum_a\pi_{\omega,\theta}(a|s)\sum_{s'}\gamma P(s'|s,a)\frac{\partial U(\omega,s')}{\partial\theta}\tag{6} \]
我们可以用(3)和(4)进一步展开右手边,得到以下定理:
Intra-Option Policy Gradient Theorem
**Theorem 1 (Intra-Option Policy Gradient Theorem). **
给定一组参数 \(\theta\) 可微的随机intra-option的Markov期权,其gradient of the expected discounted return相对于 \(\theta\) 和初始条件 \((s_0,\omega_0)\) 的梯度为:
其中\(\mu_\Omega(s,\omega|s_0,\omega_0)\) 是state-option对沿着从 \((s_0,\omega_0)\) 开始的轨迹的discounted weighting,
证明在附录中。
为了阅读的连贯性将推导过程放在这里
在上述过程推导得到:
\[\frac{\partial Q_\Omega(s,\omega)}{\partial\theta}=\sum_a\frac{\partial\pi_{\omega,\theta}(a|s)}{\partial\theta}Q_U(s,\omega,a)+ \sum_a\pi_{\omega,\theta}(a|s)\sum_{s'}\gamma P(s'|s,a)\frac{\partial U(\omega,s')}{\partial\theta}\tag{6} \]\[\because U(\omega,s')=(1-\beta_{\omega,\vartheta}(s'))Q_\Omega(s',\omega)+\beta_{\omega,\vartheta}(s')V_\Omega(s')\tag{3} \]需要注意 \(\beta_{\omega,\vartheta}\) 定义即由 \(\vartheta\) 参数化的 \(\omega\) 的的终止函数,所以其中不含 \(\theta\)
\[\begin {aligned} \therefore \frac{\partial U(\omega,s')}{\partial \theta} &= (1-\beta_{\omega,\vartheta}(s'))\frac{\partial Q_\Omega(s',\omega)}{\partial \theta}+\beta_{\omega,\vartheta}(s')\frac{\partial V_\Omega(s')}{\partial \theta}\\ &=(1-\beta_{\omega,\vartheta}(s'))\frac{\partial Q_\Omega(s',\omega)}{\partial \theta}+\beta_{\omega,\vartheta}(s')\sum_{\omega'}\pi_\Omega(\omega'|s')\frac{\partial Q_\Omega(s',\omega')}{\partial \theta}\\ &=\frac{\partial Q_\Omega(s',\omega')}{\partial \theta}\sum_{\omega'}(\beta_{\omega,\vartheta}(s')\pi_\Omega(\omega'|s')+(1-\beta_{\omega,\vartheta}(s'))\mathbb{1}_{\omega=\omega'}) \end {aligned}\tag{7} \]将(7)带入(6)得:
\[\frac{\partial Q_\Omega(s,\omega)}{\partial\theta}=\sum_a\frac{\partial\pi_{\omega,\theta}(a|s)}{\partial\theta}Q_U(s,\omega,a) + \sum_a\pi_{\omega,\theta}(a|s)\sum_{s'}\gamma P(s'|s,a)\sum_{\omega'}(\beta_{\omega,\vartheta}(s')\pi_\Omega(\omega'|s')+(1-\beta_{\omega,\vartheta}(s'))\mathbb{1}_{\omega'=\omega})\frac{\partial Q_\Omega(s',\omega')}{\partial \theta}\tag{8} \]同时再引入上文已经提到得式(4),对其引入discount可得:
\[P^{(1)}_\gamma(s_{t+1},\omega_{t+1}|s_t,\omega_t)=\sum_a\pi_{\omega_t}(a|s_t)\gamma P(s_{t+1}|s_t,a)[(1-\beta_{\omega_t}(s_{t+1}))\mathbb{1}_{\omega_t=\omega_{t+1}}+\beta_{\omega_t}(s_{t+1})\pi_\Omega(w_{t+1}|s_{t+1})] \]同理可以得到同样的one-step转移概率:
\[P^{(1)}_\gamma(s_{t+1},\omega_{t}|s_t,\omega_{t-1})=\sum_a\pi_{\omega_t}(a|s_t)\gamma P(s_{t+1}|s_t,a)[(1-\beta_{\omega_{t-1}}(s_{t}))\mathbb{1}_{\omega_t=\omega_{t-1}}+\beta_{\omega_{t-1}}(s_{t})\pi_\Omega(w_{t}|s_{t})] \]进而可以得到k-steps的递归表达式:
\[P^{(k)}_\gamma(s_{t+k},\omega_{t+k}|s_t,\omega_t)=\sum_{s_{t+1}}\sum_{\omega_{t+1}}(P^{(1)}_\gamma(s_{t+1},\omega_{t+1}|s_t,\omega_t)P^{(k-1)}_\gamma(s_{t+k},\omega_{t+k}|s_{t+1},\omega_{t+1})) \]\[P^{(k)}_\gamma(s_{t+k},\omega_{t+k-1}|s_t,\omega_{t-1})=\sum_{s_{t+1}}\sum_{\omega_{t}}(P^{(1)}_\gamma(s_{t+1},\omega_{t}|s_t,\omega_{t-1})P^{(k-1)}_\gamma(s_{t+k},\omega_{t+k-1}|s_{t+1},\omega_{t})) \]所以针对式(8)论文给出化简:
\[\begin {aligned} \frac{\partial Q_\Omega(s,\omega)}{\partial\theta}&=\sum_a\frac{\partial\pi_{\omega,\theta}(a|s)}{\partial\theta}Q_U(s,\omega,a) + \sum_a\pi_{\omega,\theta}(a|s)\sum_{s'}\gamma P(s'|s,a)\sum_{\omega'}(\beta_{\omega,\vartheta}(s')\pi_\Omega(\omega'|s')+(1-\beta_{\omega,\vartheta}(s'))\mathbb{1}_{\omega'=\omega})\frac{\partial Q_\Omega(s',\omega')}{\partial \theta}\\ &=\sum_a\frac{\partial\pi_{\omega,\theta}(a|s)}{\partial\theta}Q_U(s,\omega,a) + \sum_{s'}\sum_{\omega'}P^{(1)}_\gamma(s',\omega'|s,\omega)\frac{\partial Q_\Omega(s',\omega')}{\partial \theta}\\ &=\sum_{k=0}^\infty\sum_{s',\omega'}P^{(k)}_\gamma(s',\omega'|s,\omega)\sum_a\frac{\partial\pi_{\omega',\theta}(a|s')}{\partial\theta}Q_U(s',\omega',a)\\ \end{aligned}\tag{9} \]疑问:(9)中第二步是如何到第三步的
问题关键:要注意表达式中字母角标的变化,递归得到的该表达式
\[\frac{\partial Q_\Omega(s',\omega')}{\partial\theta}=\sum_a\frac{\partial\pi_{\omega',\theta}(a|s')}{\partial\theta}Q_U(s',\omega',a) + \sum_{s''}\sum_{\omega''}P^{(1)}_\gamma(s'',\omega''|s',\omega')\frac{\partial Q_\Omega(s'',\omega'')}{\partial \theta}\\ \]\[\begin {aligned} \frac{\partial Q_\Omega(s,\omega)}{\partial\theta} &=\sum_a\frac{\partial\pi_{\omega,\theta}(a|s)}{\partial\theta}Q_U(s,\omega,a) + \sum_{s'}\sum_{\omega'}P^{(1)}_\gamma(s',\omega'|s,\omega)\frac{\partial Q_\Omega(s',\omega')}{\partial \theta}\\ &=\sum_a\frac{\partial\pi_{\omega,\theta}(a|s)}{\partial\theta}Q_U(s,\omega,a) + \sum_{s'}\sum_{\omega'}P^{(1)}_\gamma(s',\omega'|s,\omega)\left(\sum_a\frac{\partial\pi_{\omega',\theta}(a|s')}{\partial\theta}Q_U(s',\omega',a) + \sum_{s''}\sum_{\omega''}P^{(1)}_\gamma(s'',\omega''|s',\omega')\frac{\partial Q_\Omega(s'',\omega'')}{\partial \theta}\right)\\ &=\dots\\ &=\sum_{k=0}^\infty\sum_{s',\omega'}P^{(k)}_\gamma(s',\omega'|s,\omega)\sum_a\frac{\partial\pi_{\omega',\theta}(a|s')}{\partial\theta}Q_U(s',\omega',a)\\ \end{aligned} \]
这个梯度描述了原始水平上局部变化对全局期望折现收益的影响。相反,sub-goal或pseudo-reward方法假设option的目标仅仅是优化其自身的奖励函数,而忽略了提议的变更如何在总目标中如何传播。
Termination Gradient Theorem
现在我们将注意力转向计算终止函数的梯度,这次假设是随机的,并且在ϑ中是可微的。
从(1,2,3)可以得到:
直接展开,很容易得到
\[\because Q_\Omega(s,\omega)=\sum_a\pi_{\omega,\theta}(a|s)Q_U(s,\omega,a)\\ \therefore \frac{\partial Q_\Omega(s,\omega)}{\partial\vartheta}=\sum_a\pi_{\omega,\theta}(a|s)\frac{\partial Q_U(s,\omega,a)}{\partial\vartheta}\\ \because Q_U(s,\omega,a)=r(s,a)+\gamma\sum_{s'}P(s'|s,a)U(\omega,s')\\ \therefore \frac{\partial Q_U(s,\omega,a)}{\partial \vartheta}=\gamma\sum_{s'}P(s'|s,a)\frac{\partial U(\omega,s')}{\partial\vartheta}\\ \frac{\partial Q_\Omega(s,\omega)}{\partial\vartheta}=\sum_a\pi_{\omega,\theta}(a|s)\sum_{s'}\gamma P(s'|s,a)\frac{\partial U(\omega,s')}{\partial\vartheta} \]
因此,关键量是 \(U\) 的梯度。这是call-and-return执行的自然结果,其中终止函数的“goodness”只能在进入下一个状态时评估。相关梯度可进一步扩展为:
其中 \(A_\Omega\) 是advantage function(Baird,1993),\(A_\Omega(s',\omega)=Q_\Omega(s',\omega)-V_\Omega(s')\)。
\[\frac{\partial Q_\Omega(s,\omega)}{\partial\vartheta}=\sum_a\pi_{\omega,\theta}(a|s)\sum_{s'}\gamma P(s'|s,a)\frac{\partial U(\omega,s')}{\partial\vartheta}\\ U(\omega,s')=(1-\beta_{\omega,\vartheta}(s'))Q_\Omega(s',\omega)+\beta_{\omega,\vartheta}(s')V_\Omega(s') \]\[\begin{aligned} \frac{\partial U(\omega,s')}{\partial\vartheta}&=-\frac{\partial\beta_{\omega,\vartheta}(s')}{\partial\vartheta}Q_\Omega(s',\omega)+(1-\beta_{\omega,\vartheta}(s'))\frac{\partial Q_\Omega(s',\omega)}{\partial\vartheta}+\frac{\partial\beta_{\omega,\vartheta}(s')}{\partial\vartheta}V_\Omega(s')+\beta_{\omega,\vartheta}(s')\frac{\partial V_\Omega(s')}{\partial\vartheta}\\ &=-\frac{\partial\beta_{\omega,\vartheta}(s')}{\partial\vartheta}(Q_\Omega(s',\omega)-V_\Omega(s'))+(1-\beta_{\omega,\vartheta}(s'))\frac{\partial Q_\Omega(s',\omega)}{\partial\vartheta}+\beta_{\omega,\vartheta}(s')\frac{\partial V_\Omega(s')}{\partial\vartheta} \end{aligned} \]\[Q_\Omega(s',\omega)=\sum_a\pi_{\omega,\theta}(a|s')\left(r(s',a)+\sum_{s''}\gamma P(s''|s',a)U(\omega,s'')\right) \]\[\begin{aligned} V_\Omega(s')&=\sum_{\omega'}\pi_\Omega(\omega'|s')Q_\Omega(s',\omega')\\ &=\sum_{\omega'}\pi_\Omega(\omega'|s')\sum_a\pi_{\omega',\theta}(a|s')\left(r(s',a)+\sum_{s''}\gamma P(s''|s',a)U(\omega',s'')\right) \end{aligned} \]\[\frac{\partial Q_\Omega(s',\omega)}{\partial\vartheta}=\sum_a\pi_{\omega,\theta}(a|s')\sum_{s''}\gamma P(s''|s',a)\frac{\partial U(\omega,s'')}{\partial\vartheta}\\ \frac{\partial V_\Omega(s')}{\partial\vartheta}=\sum_{\omega'}\pi_\Omega(\omega'|s')\sum_a\pi_{\omega',\theta}(a|s')\sum_{s''}\gamma P(s''|s',a)\frac{\partial U(\omega',s'')}{\partial\vartheta} \]\[\begin{aligned} \frac{\partial U(\omega,s')}{\partial\vartheta} &=-\frac{\partial\beta_{\omega,\vartheta}(s')}{\partial\vartheta}(Q_\Omega(s',\omega)-V_\Omega(s'))+(1-\beta_{\omega,\vartheta}(s'))\frac{\partial Q_\Omega(s',\omega)}{\partial\vartheta}+\beta_{\omega,\vartheta}(s')\frac{\partial V_\Omega(s')}{\partial\vartheta}\\ &=-\frac{\partial\beta_{\omega,\vartheta}(s')}{\partial\vartheta}(Q_\Omega(s',\omega)-V_\Omega(s')))+(1-\beta_{\omega,\vartheta}(s'))\sum_a\pi_{\omega,\theta}(a|s')\sum_{s''}\gamma P(s''|s',a)\frac{\partial U(\omega,s'')}{\partial\vartheta}\\ &\quad+\beta_{\omega,\vartheta}(s')\sum_{\omega'}\pi_\Omega(\omega'|s')\sum_a\pi_{\omega',\theta}(a|s')\sum_{s''}\gamma P(s''|s',a)\frac{\partial U(\omega',s'')}{\partial\vartheta}\\ &=-\frac{\partial\beta_{\omega,\vartheta}(s')}{\partial\vartheta}A_\Omega(s',\omega)+\sum_{\omega'}\sum_{s''}P_\gamma^{(1)}(s'',\omega'|s',\omega)\frac{\partial U(\omega',s'')}{\partial\vartheta}\\ &=-\sum_{\omega',s''}\sum_{k=0}^\infty P_\gamma^{(k)}(s'',\omega'|s',\omega)\frac{\partial \beta_{\omega',\vartheta}(s'')}{\partial\vartheta}A_\Omega(s'',\omega') \end{aligned} \]
递归地展开 \(\frac{\partial U(\omega',s'')}{\partial\vartheta}\) 得到了与定理(1)相似的形式,但其中状态-选项对的权重现在是根据移动一个时间步的马尔可夫链:\(\mu_\Omega(s_{t+1},\omega_t|s_t,\omega_{t+1})\)(详见附录)。
Theorem 2 (Termination Gradient Theorem).
给出一组随机终止函数在其参数ϑ上可微的Markov期权,期望折现收益目标相对于ϑ和初始条件(s1,ω0)的梯度为:
其中\(\mu_\omega(s',\omega|s_1,\omega_0)\) (s1,ω0)中状态选项对的贴现权重:
优势函数经常出现在政策梯度方法中(Sutton等人。2000年)在形成基线以减少梯度估计的方差时。它在这种情况下的出现主要与算法设计有关。有趣的是,在我们的例子中,它是推导的直接结果,并且给了定理一个直观的解释:当期权选择相对于所有期权的期望值是次优时,优势函数是负的,它推动梯度修正上升,这增加了终止的几率。终止后,代理有机会使用πΩ选择更好的选项。类似的想法也构成了期权的中断执行模型(Sutton,Precup,and Singh 1999),在该模型中,只要QΩ(s?,ω)对于电流选项ω小于VΩ(s?)。(Mann、Mankowitz和Mannor 2014)最近在数值迭代设置下,通过打断Bellman算子的镜头研究了中断选项。终止梯度定理可以解释为提供了一个基于梯度的中断Bellman算子。
Algorithms and Architecture
基于定理1和定理2,我们现在可以设计一个学习option的随机梯度下降算法。利用双时间尺度框架(Konda和Tsitsiklis 2000),我们建议在快速的时间尺度上学习value,同时以较慢的速度更新内部期权策略和终止函数。
two-timescale framework:
我们将产生的系统称为一个 \(option\text{-}critic\ architecture\) ,参考actor-critic架构(Sutton 1984)。option内策略、终止函数和option上的策略属于系统的actor部分,而critic则由 \(Q_U\) 和 \(A_\Omega\) 组成。option-critic体系结构没有规定如何获得 \(\pi_\Omega\) ,因为现有的各种方法都可以应用:在SMDP级别使用策略梯度方法,在option模型上使用规划器,或者使用时间差分更新。如果 \(\pi_\Omega\) 是option上的贪婪策略,则由(2)得到相应的一步策略更新目标 \(g_t^{(1)}\) :
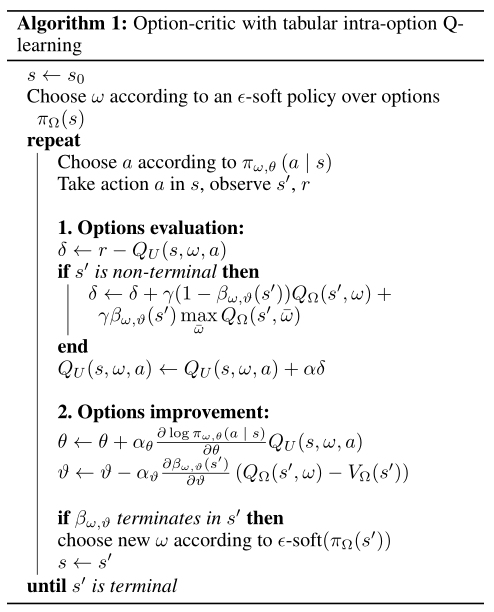
这也是Sutton,Precup和Singh 1999的intra-option Q-learning算法的更新目标。算法1给出了一个使用option内Q学习的option critic的原型实现。假设的表格设置只是为了表达的清晰。我们分别给出了critic、intra-option策略和终止函数的学习率的 \(\alpha,\alpha_\theta,\alpha_\vartheta\)。
除 \(Q_\Omega\) 学习 \(Q_U\) 在计算上浪费了大量的参数和样本。一个实际的解决方案是只学习 \(Q_\Omega\) 并从中得到 \(Q_U\) 的估计值。因为 \(Q_U\) 是对下一个state的期望, \(Q_U(s,\omega,a)=\mathbb{E}_{s'\sim P}[r(s,a)+\gamma U(\omega,s')|s,\omega,a]\) ,结果表明 \(g_t^{(1)}\) 是一个合适的估计量。我们选择这种方法作为我们在Arcade Learning Environment中使用深度神经网络的实验。
后续
由于篇幅太长网站渲染卡顿,影响浏览体验,因此根据理论与实验分为上下两篇
[The option-critic architecture(下)]( https://www.cnblogs.com/codonU/p/13390472.html )

 浙公网安备 33010602011771号
浙公网安备 33010602011771号