并行计算架构和编程 | Parallel Programing

Parallel Programing Basics
Creating a parallel program
并行加速比的下限:Amdahl’s Law(阿姆达尔定律)
并行程序的宏观思考过程可总结如下:
- 挖掘工作可并行的部分。
- 划分工作。
- 管理数据的方面,沟通,同步。
最初我们计算并行效率可通过如下公式:
\(Speedup (Pprocessor) = \frac{Time(1 Processor)}{Time(P Processor)}\)
我们能够依据Amdahl’s定律得知\(Speedup\)是有上限的,定义\(S\)为不可并行执行占总顺序执行的比例,那么:
\(Amdahl’s Law = \frac{1}{s+\frac{1-s}{p}}\)
举例
先需要对一个\(N * N\)的图片进行如下两个步骤:
- 提高图片每一个像素的亮度至两倍
- 对图片全部像素求平均
我们可以很容易此种方法:对于步骤1无数据依赖完全可并行,对于步骤2可以先P个线程分别并行求和某一块区域,最终将P块区域的和相加,求平均。那么就有下图所示:
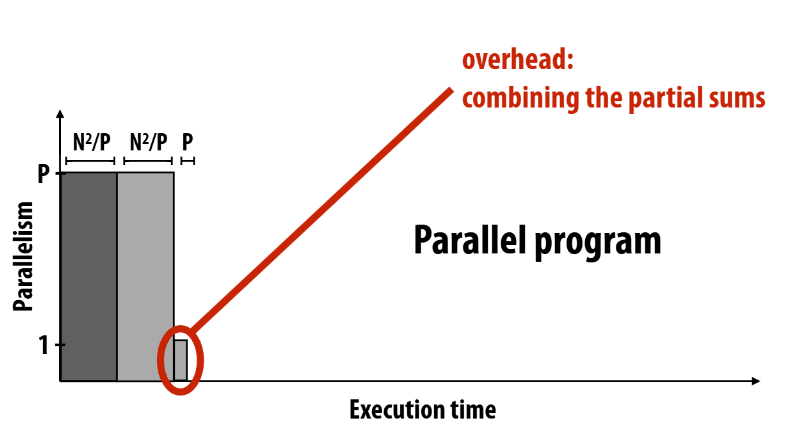
其中\(S = \frac{p}{2^n}\), \(Speedup <= \frac{2n^2p}{p^2+2n^2-p},当n>>p时,Speedup <= 1\)
并行加速比的上限: Gustafson's law(古斯塔夫森定律)
Parallel Programming Process
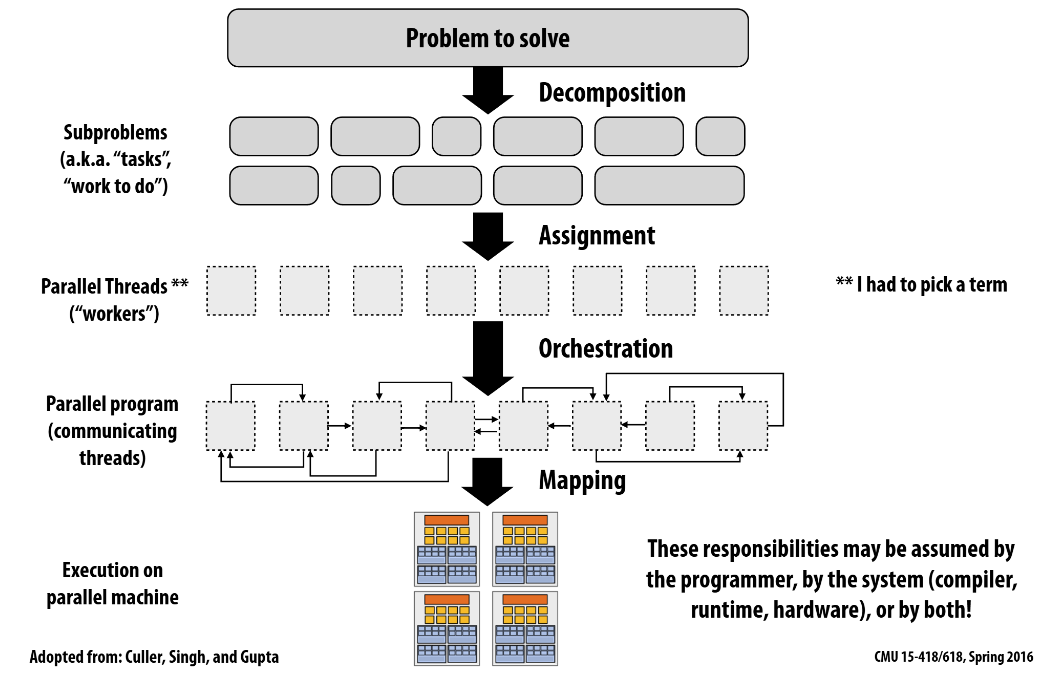
- Decomposition(分解):将原问题分解为许多子问题(tasks),这个过程需要思考依赖关系,最好能够分解出足够的子问题让全部的执行部件处于忙碌状态
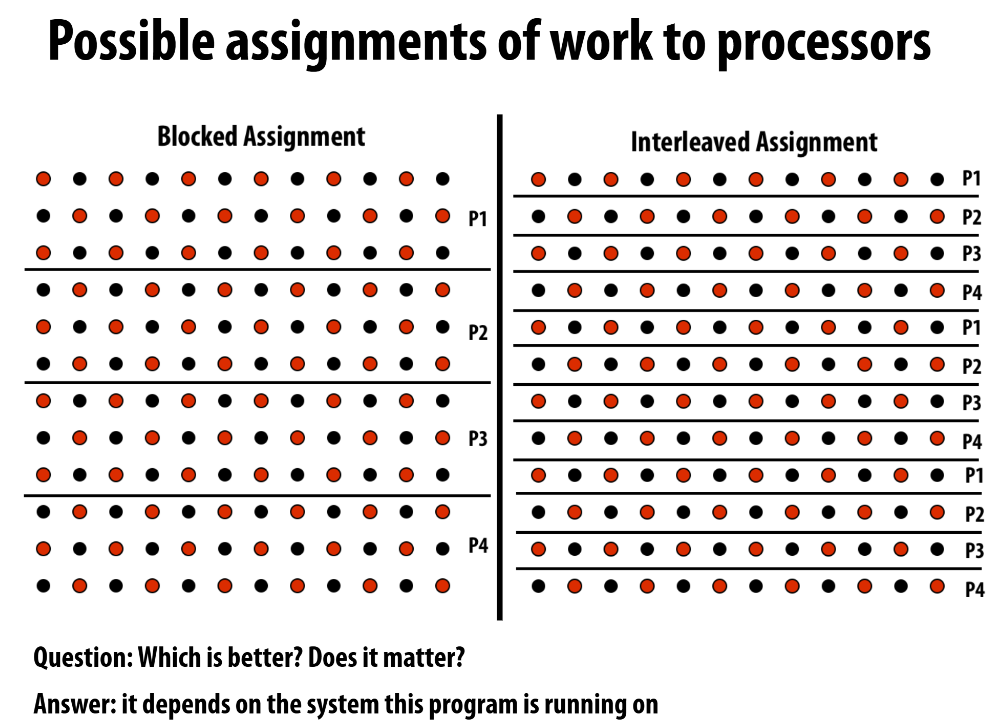
- Assignment(分配):将子问题分配给线程进行执行,这个过程需要思考负载均衡,减少消息传递消耗(communication costs)
- 静态分配:硬编码分配方式,指定tasks给线程执行
- 动态分配:运行时决定线程执行哪些tasks,比如将tasks装入queue,线程执行完task后再从queue中取出task,一般不会有太差的负载均衡
- Orchestration(编排):需要考虑组织消息传递,同步,保持较好的局部性
- Mapping(映射):将线程的工作映射到处理器执行单元上,一般不是程序员需要考虑的事情,一般由操作系统,编译器,硬件(CPU,GPU)决定
A parallel programming example
算法执行Gauss - Seidel sweeps
$Gauss-Seidel \ sweeps更新方式: A[i,j] = 0.2 * (A[i, j] + A[i,j - 1] + A[i - 1, j] + A[i, j + 1] + A[i + 1, j]) $, 数据依赖如下:(回想下PLCS问题,其LCS普通算法数据依赖很像这个)
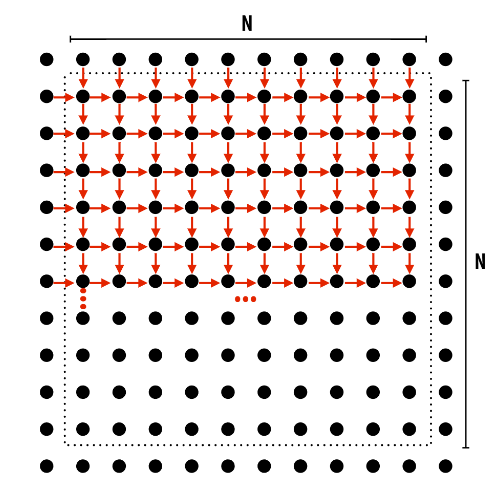
对于这个算法,我们挖掘其中的可并行性,发现对角线上的元素无数据依赖:
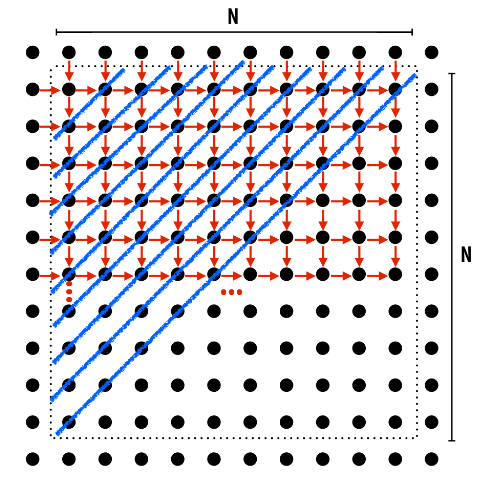
但是这依旧有许多问题:
- 负载不均衡:每个对角线上需处理的元素个数偏差较大
- 局部性差
- 需要同步
换个算法吧,我们需要让生活更美好更简单一点:红黑排序
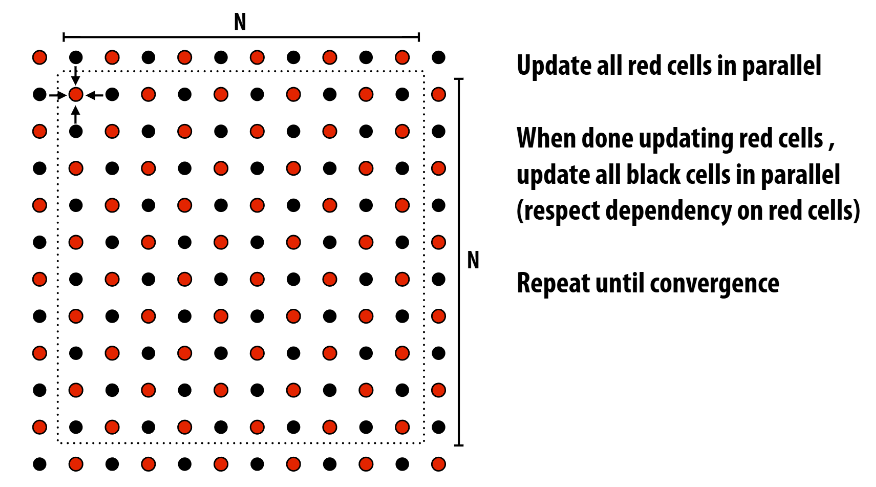
为什么说要取决于程序运行在哪个机器上呢?
需要注意边界情况,当程序运行在Message passing Model时,因为数据在不同的机器/处理器上,边界数据传递需要开销,那么边界越多开销也越大
Work Distribution and Scheduling
Assignment
Static Assignment
- 优点:减少了运行时动态分配所需的额外计算。
- 缺点:容易负载不均衡。尽管我们静态分配看起来分配平均,但可能总有某些任务运行的时间很长。
- 适合静态分配的场景:
- work num和work execution time已知或可预测
- work num已知,work execution time未知但其统计分布可知
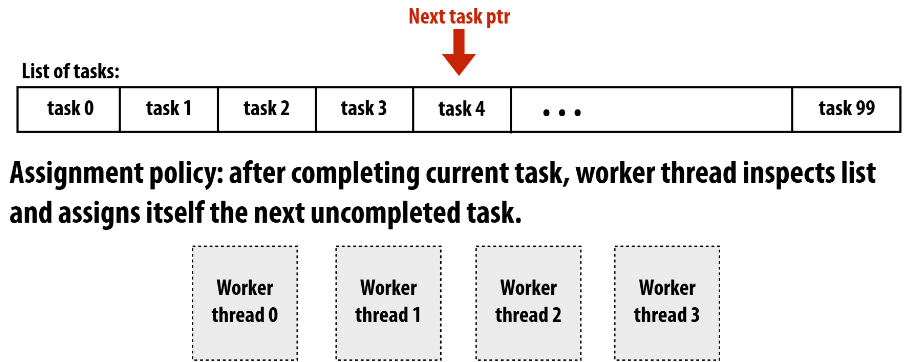
Dynamic Assignment
实现方式之一就是任务队列和线程池了,be like:
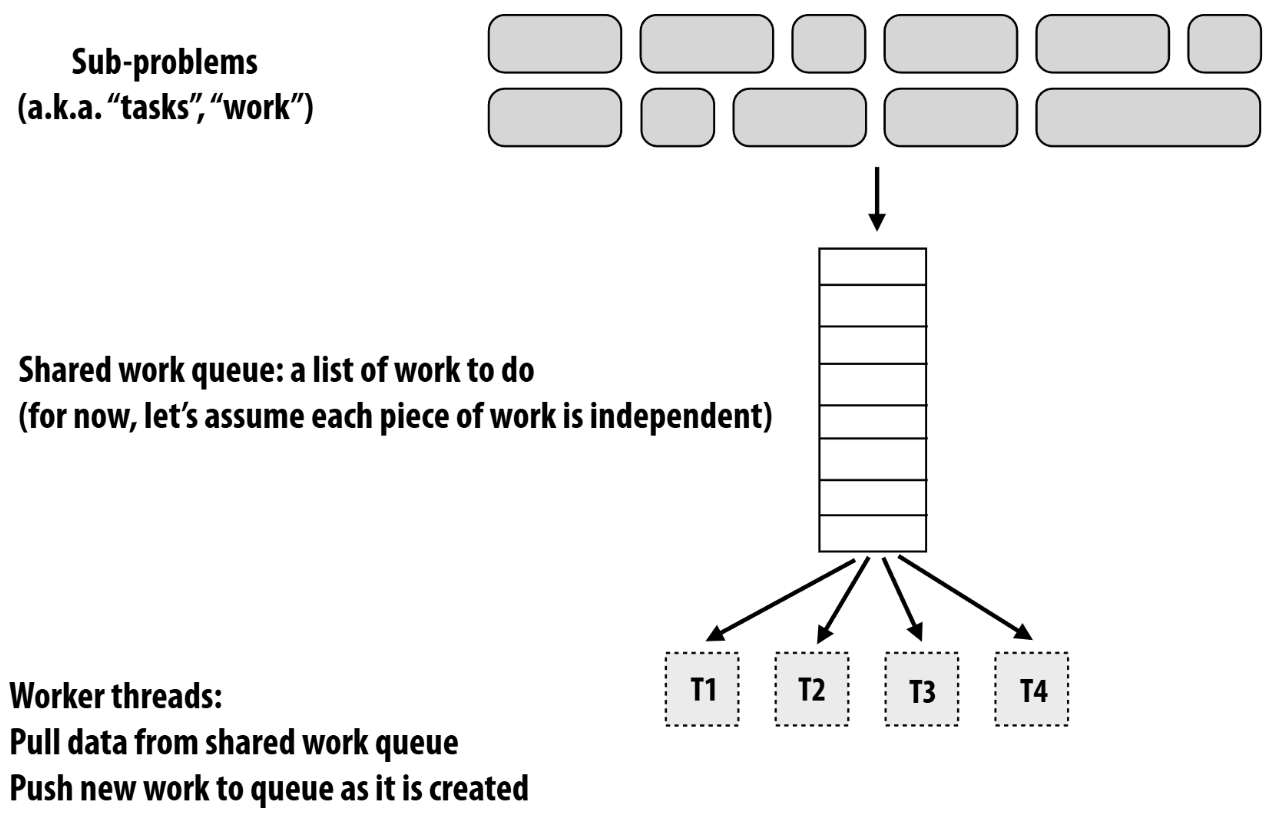
- 优点:很好地缓解了负载不均衡的问题,不管任务执行时间长短,线程执行完即可继续到任务队列中获取任务执行。(当然这需要一点额外任务的安排,下面将会讲解)
- 缺点:锁的竞争。在任务队列中获取任务涉及到同步,通信等问题,情况可能be like:
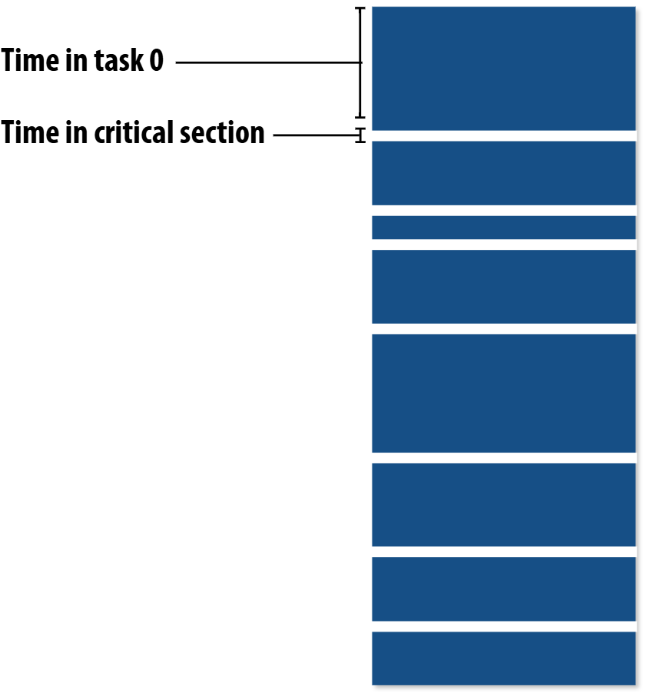
critical section即临界区,可以看到上图中有很多临界区的开销。- 大颗粒度的任务划分解决临界区开销,但是会引入负载不均衡的问题。
- 小颗粒度的任务划分解决负载不均衡,但是会引入更对临界区的开销。
所以我们需要一些聪明的任务划分方法,经验告诉我们:先划分为大颗粒度,再不断细化为小颗粒度,大颗粒度任务优先执行
上述问题的主要来源是只有一个任务队列,那么我们拥有Distributed work queues不就解决了这个问题吗?be like:
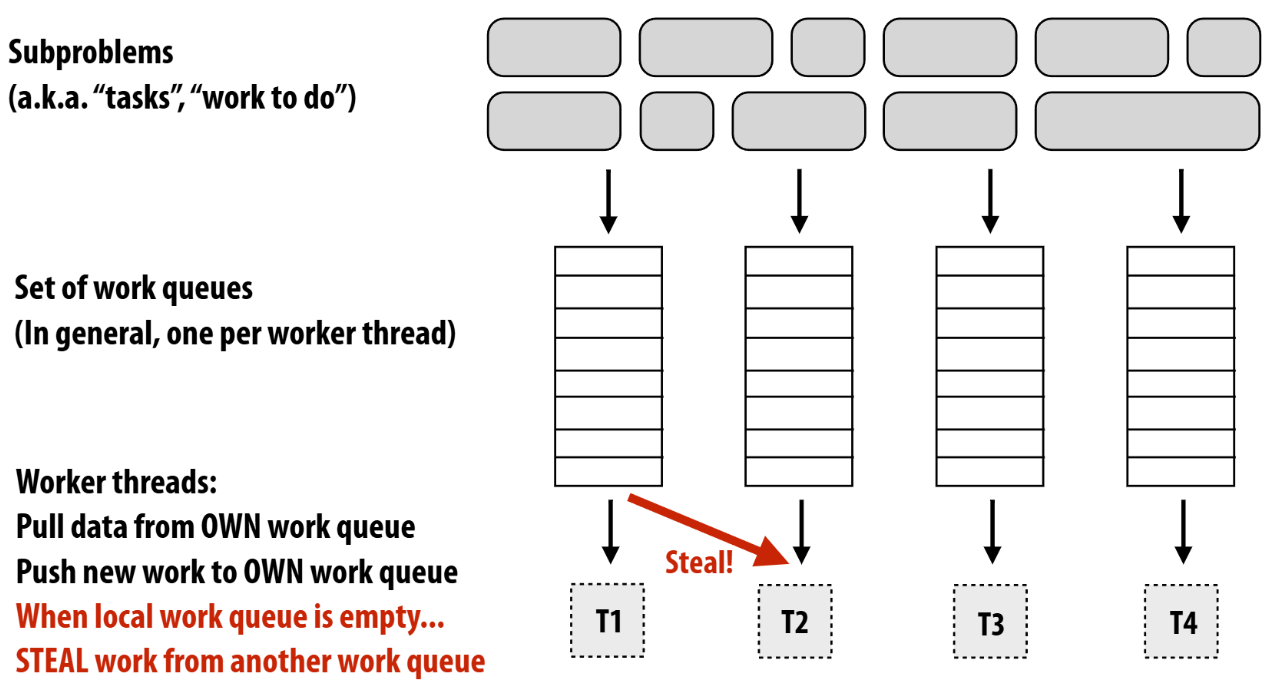
对于steal还有很多问题有待解决:1. 从哪个任务队列中steal? 2.steal多少?...
fork-join parallelism
Common parallel programming patterns
-
Data parallel. such as: ISPC foreach, ISPC bulk tasj launch
-
用线程显示地管理并行,such as C code with pthreads
- 需要注意的是这种方式会导致每一个thread占用一个core(如果是超线程的话,两个thread占用一个core)。
- 当显示创建的软件线程超过了硬件线程,那么软件线程会抢占硬件资源,导致上下文管理花费较高。
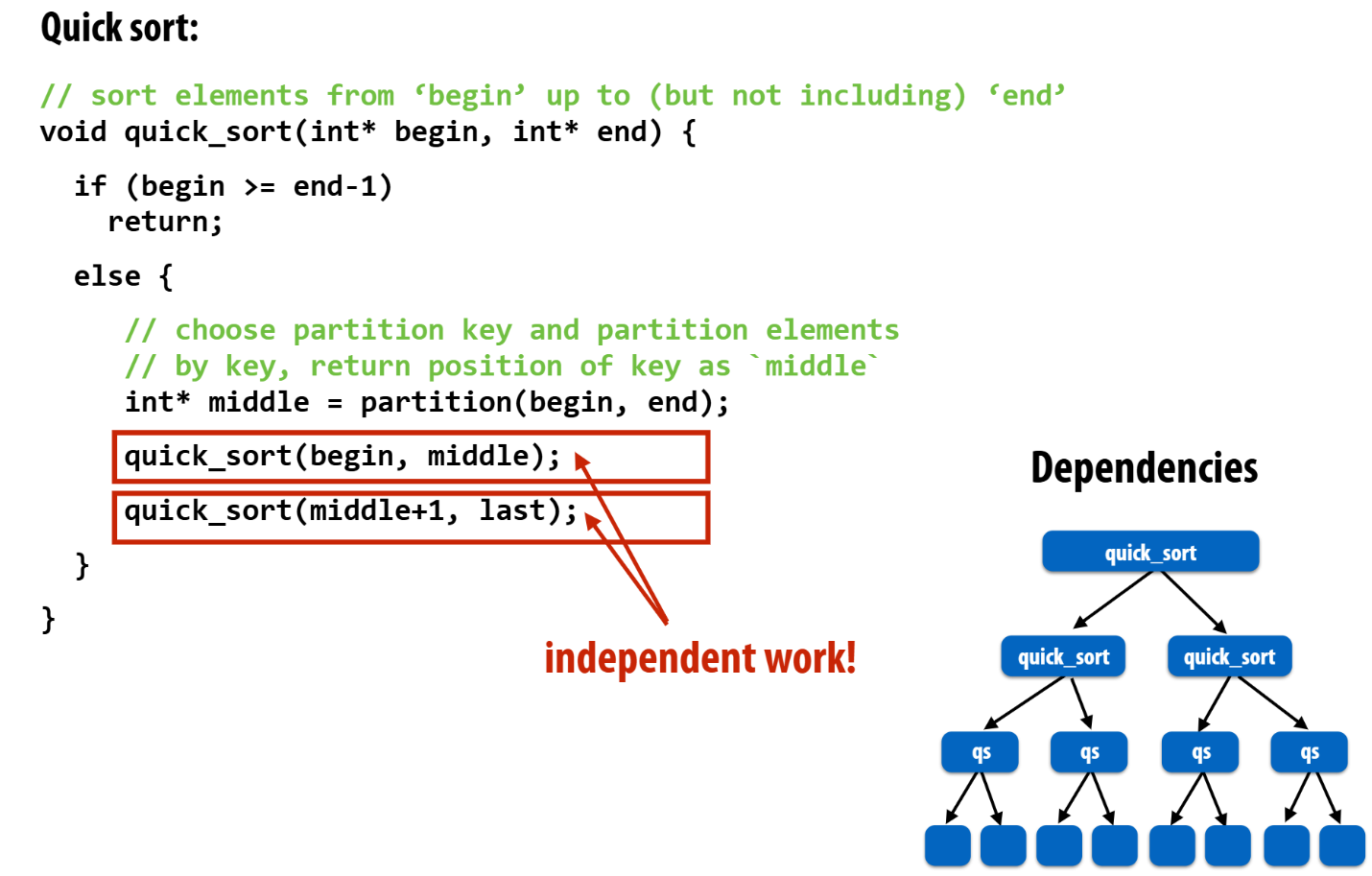
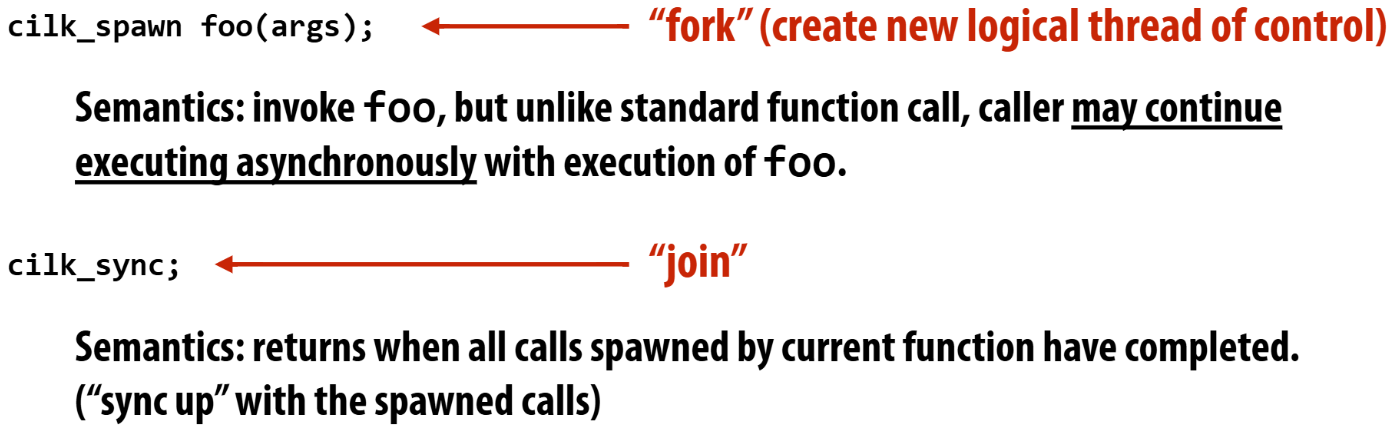
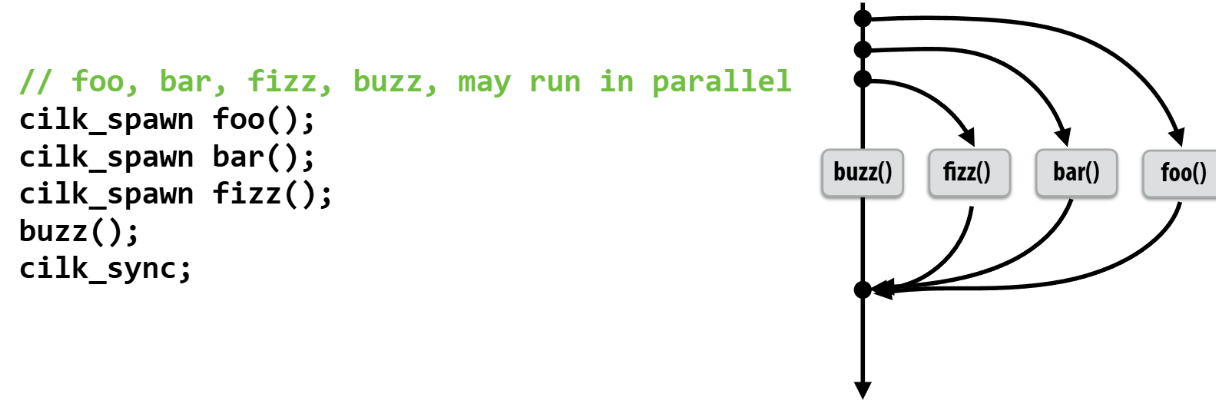
fork-join parallelism是一种隐式的基于线程管理并行的方式。典型运用场景为需要用分治算法解决的问题。be like:
抽象实现
逻辑效果
具体效果
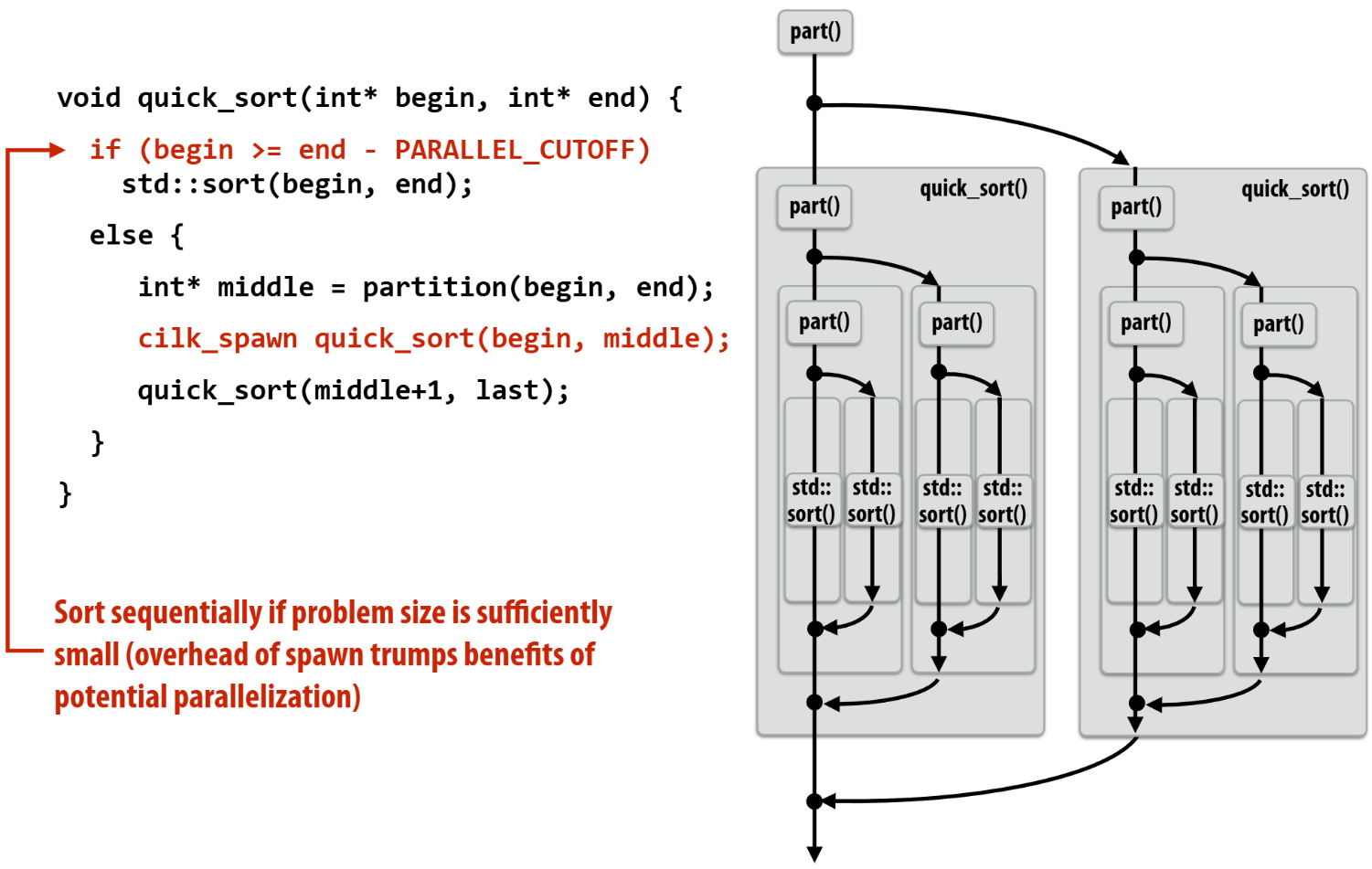
具体实现
实现思路即上述提及到的Distributed work queues + threads pool
数据并行(Data Parallelism)
并行计算模式(Parallel Patterns)是一组可复用的设计方案,用于组织并行算法的结构,以提升可扩展性和性能。
并行模式大致可分为两类:
-
任务并行(Task Parallelism):将一个大任务递归或系统地拆分为多个子任务,分别并行处理,再将结果汇聚。这类模式包括 Fork–Join 和 Branch-and-Bound 等。
-
数据并行(Data Parallelism):对大规模数据集合执行相同的操作,每个数据元素或块独立并行地被处理,常见模式有 Map、Reduce、Scan 等。
理论知识
介绍了相关优化知识
Map 模式
Map 模式对集合中每个元素执行相同的操作,完全独立,典型实现为并行 for-loop。每次迭代互不依赖,易于在多处理器上分配。例如,将数组中每个元素乘以常数、图像像素滤波等。
parallel_for(i = 0; i < N; ++i)
B[i] = f(A[i]);
Reduce 模式
Reduce(规约)模式将集合中的所有元素通过某个二元操作(如求和、最大值)合并为单个结果。并行实现通常先将数据分块,在各自块内完成局部规约(local reduction),然后再将所有局部结果汇总(global reduction)。
形式化定义:给定二元函数 ⊕、输入集合 A[0..n) 和初始值 b0,最终结果
b = A[0] ⊕ (A[1] ⊕ ( ... ⊕ (A[n-1] ⊕ b0)...))
Scan(Prefix Sum)模式
Scan(前缀和或前缀运算)与 Reduce 类似,但输出一个与输入等长的数组,其中每个元素 S[i] 是前 i 个元素规约的结果。即
S[0] = b0
S[i] = S[i-1] ⊕ A[i-1], for 1 ≤ i ≤ n
并行实现典型算法(Blelloch scan)分为上升(up-sweep)和下降(down-sweep)两个阶段,时间复杂度为 O(log n),适用于 GPU 和多核 CPU。
Assagement 3的作业即是完成Scan

 浙公网安备 33010602011771号
浙公网安备 33010602011771号