
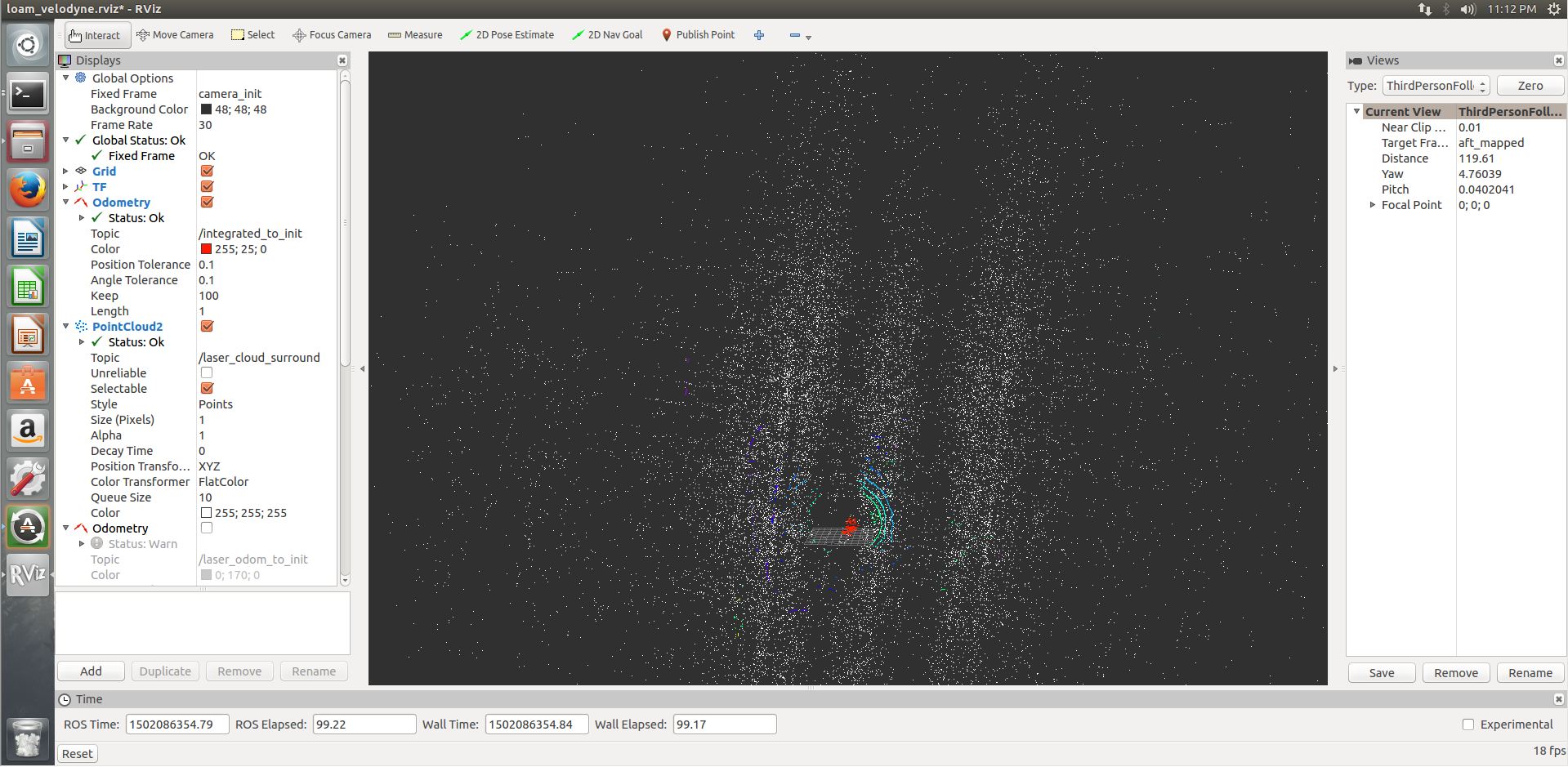
运行loam_velodyne时的步骤和存在的问题
ROS jizhang的工程 git laboshinl的工程
环境是ubuntu 14.04
ROS 版本 indigo
工程地址:
https://github.com/laboshinl/loam_velodyne.git
terminal 1:
$ cd ~/catkin_ws/src/
$ git clone https://github.com/laboshinl/loam_velodyne.git
$ cd ~/catkin_ws
$ catkin_make -DCMAKE_BUILD_TYPE=Release
$ source ~/catkin_ws/devel/setup.bash
roslaunch loam_velodyne loam_velodyne.launch
terminal 2:
$ cd ~/catkin_ws/src/
$ source ~/catkin_ws/devel/setup.bash
$ roslaunch velodyne_pointcloud VLP16_points.launch pcap:="/home/laboshinl/Downloads/velodyne.pcap"

bag 没有尝试 ,貌似虚拟机不能连接到雷达上保存数据.
等我更新我的ubuntu系统后再尝试一下吧
遇到的问题有两个:
1.ROS中执行前需运行$source ~/catkin_ws/devel/setup.bash.
[xxx] is neither a launch file in package [xxx] nor is [xxx] a launch file name
2.工程执行前需要对velodyne_driver单独进行编译,以确保 velodyne_point 下的VLP16_points.launch方法找到执行位置
编译velodyne的方法参照:http://wiki.ros.org/velodyne_driver
成功时,在
roslaunch velodyne_pointcloud 时Tab会出现需要的方法,否则也会出现1中的错误
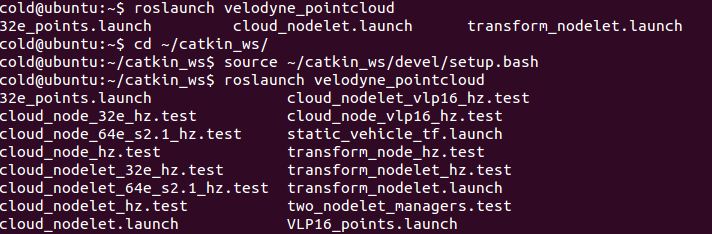
然后执行读取pcap文件.
编译不成功时,会出现 :

运行雷达的错误文件也会出现相同的问题.
论坛上了解说 改变const int N_SCANS = 32;可以解决
但尝试后没有效果
当VLP16时,N_SCANS是16 和32 都可以正常跑.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号