pcss 软阴影
PCF
Percentage Closer Filtering:PCF是一种用于阴影反锯齿的方法,本身不是软阴影方法。
算法流程说明:
- Perform multiple (e.g. 7x7) depth
comparisons for each fragment - Then, averages results of comparisons
- e.g. for point P on the floor,
- compare its depth with all pixels
in the red box, e.g. 3x3- get the compared results, e.g.
1, 0, 1,
1, 0, 1,
1, 1, 0,- take avg. to get visibility, e.g. 0.667

pcf使用的过滤size越大,得到的阴影结果越模糊,范围也被扩大。
code:
vec2 poissonDisk[NUM_SAMPLES];
void poissonDiskSamples( const in vec2 randomSeed ) {
float ANGLE_STEP = PI2 * float( NUM_RINGS ) / float( NUM_SAMPLES );
float INV_NUM_SAMPLES = 1.0 / float( NUM_SAMPLES );
float angle = rand_2to1( randomSeed ) * PI2;
float radius = INV_NUM_SAMPLES;
float radiusStep = radius;
for( int i = 0; i < NUM_SAMPLES; i ++ ) {
poissonDisk[i] = vec2( cos( angle ), sin( angle ) ) * pow( radius, 0.75 );
radius += radiusStep;
angle += ANGLE_STEP;
}
}
float PCF(sampler2D shadowMap, vec4 coords,float filterSize) {
if(coords.x <-1.0 || coords.y>1.0 || coords.y<-1.0 || coords.y>1.0){
//不在灯光相机视野中,默认完全照亮
return 1.0;
}
float pixelSize = 1.0/2048.0;
float count = 0.0;
poissonDiskSamples(vec2(coords.x,coords.y));
for(int i=0;i<NUM_SAMPLES;i++){
vec2 uv = poissonDisk[i]*pixelSize*filterSize + coords.xy;
if(uv.x <-1.0 || uv.y>1.0 || uv.y<-1.0 || uv.y>1.0){
//不在灯光相机视野中,默认完全照亮
return 1.0;
}
float dNearest = sampleDepth(shadowMap, uv) * Z_RANGE;
float d = (coords.z+1.0)/2.0*Z_RANGE;//[-1,1]->[0,1.0]
if(!(d > dNearest+Z_EPS)){//pcf 返回可见性指标
count += 1.0;
}
}
float res = count/float(NUM_SAMPLES);
return res;
}
result:

PCF_8X8
PCF_64X64
PCSS
Percentage Closer Soft Shadows
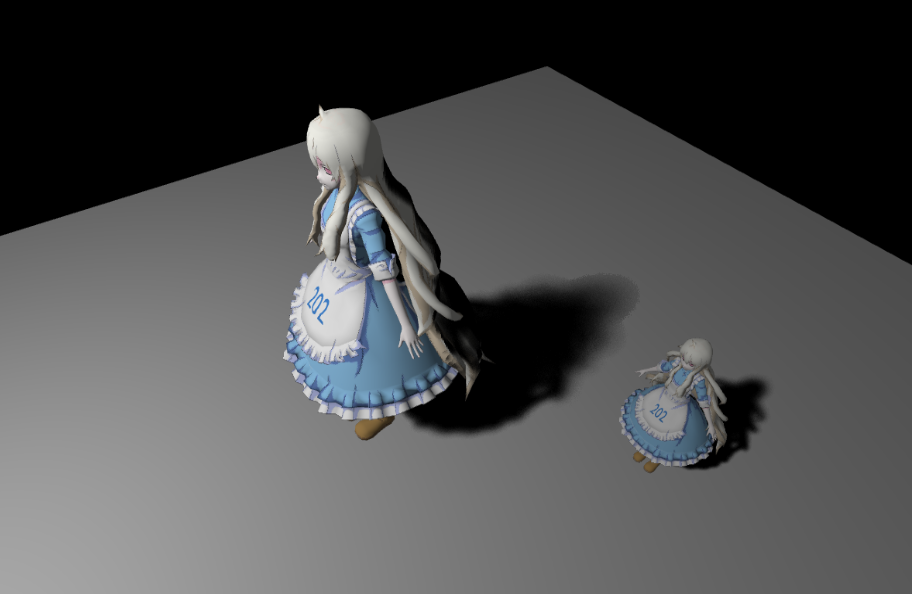
通过观察可知阴影的软硬与阴影距离阴影投掷物的距离有关,距离越近,阴影越实(硬);距离越远,阴影越虚(软)。因此可以在PCF的基础上,动态调整filter size从而实现软阴影效果。
关键在于如何选择filter size,filter size和阴影距离阴影投掷物的距离(d_receiver-d_blocker)和遮挡物距离光源的距离(d_blocker)有关, 如下图所示:
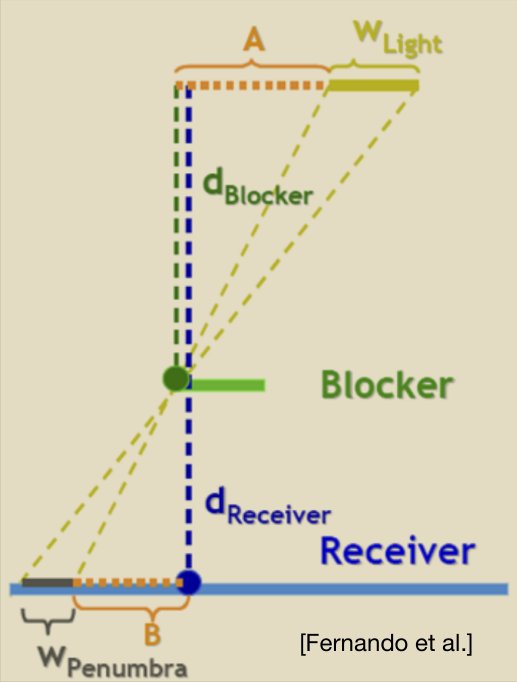
其中W_penumbra就是面光源形成的软阴影范围,也就是pcf使用的filter size。
通过三角相似关系,可以得到下面的数量关系:
其中W_light为光源宽度,在代码中可以取常量;d_receiver是物体深度,可以在shader中uLightMVP*aPosition计算得到;
d_blocker是遮挡物深度可以从pass1中记录的最近物体深度读取,读取一定范围内的遮挡物的平均深度,这个范围需要取多大?
1.Can be set constant (e.g. 5x5), but can be better with heuristics
2.理论上的blocker search region:
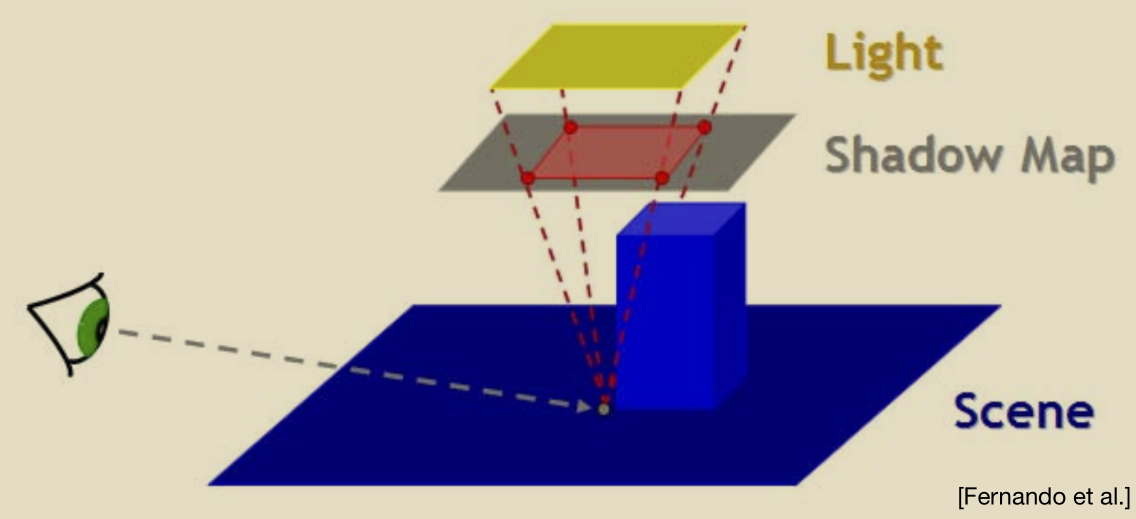
依赖于光源面积大小和观察点距离光源的距离,即图中红虚线构成四棱锥范围。有一个问题是从面光源的不同点看场景会有不同的shadw map,如果只用一个shadw map进行采样,本身这里是精确分析,最后的结果又变成了近似。
最后得到PCSS的算法流程:
The complete algorithm of PCSS
- Step 1: Blocker search
(getting the average blocker depth in a certain region) - Step 2: Penumbra estimation
(use the average blocker depth to determine filter size) - Step 3: Percentage Closer Filtering
code:
vec2 findBlocker( sampler2D shadowMap, vec2 uv, float zReceiver ) {
if(uv.x <-1.0 || uv.y>1.0 || uv.y<-1.0 || uv.y>1.0){
//不在灯光相机视野中,默认没有遮挡物
return vec2(0.0,0.0);
}
//uniformDiskSamples(uv);
float pixelSize = 1.0/2048.0;
float db = 0.0;
float ds = 0.0;
//启发式的得到搜索范围,单位:像素
float searchSize = 0.0;
searchSize = LIGHT_WIDTH*(zReceiver-NEAR_PLANE)/zReceiver;
searchSize = searchSize/200.0/pixelSize;
searchSize *= 1.5;
//固定
//searchSize = 64.0;// 64.0;
float count = 0.0;
poissonDiskSamples(vec2(uv.x*9999.0+8888.0,uv.y*7777.0+12345.0));
for(int i = 0; i < NUM_SAMPLES; i++){
vec2 uv2 = poissonDisk[i]*pixelSize*searchSize + uv;
if(uv2.x <-1.0 || uv2.y>1.0 || uv2.y<-1.0 || uv2.y>1.0){
//不在灯光相机视野中,默认没有遮挡物
return vec2(0.0,0.0);
}
float d = sampleDepth(shadowMap, uv2);
d = d*Z_RANGE;
if(d < zReceiver-5.0 ){
db += d;
count += 1.0;
}
}
db = db / count;
ds = zReceiver - db;
//db = db / float(NUM_SAMPLES);
//ds = ds / float(NUM_SAMPLES);
return vec2(db,ds);
}
float PCF(sampler2D shadowMap, vec4 coords,float filterSize) {
if(coords.x <-1.0 || coords.y>1.0 || coords.y<-1.0 || coords.y>1.0){
//不在灯光相机视野中,默认完全照亮
return 1.0;
}
float pixelSize = 1.0/2048.0;
float count = 0.0;
poissonDiskSamples(vec2(coords.x,coords.y));
for(int i=0;i<NUM_SAMPLES;i++){
vec2 uv = poissonDisk[i]*pixelSize*filterSize + coords.xy;
if(uv.x <-1.0 || uv.y>1.0 || uv.y<-1.0 || uv.y>1.0){
//不在灯光相机视野中,默认完全照亮
return 1.0;
}
float dNearest = sampleDepth(shadowMap, uv) * Z_RANGE;
float d = (coords.z+1.0)/2.0*Z_RANGE;//[-1,1]->[0,1.0]
if(!(d > dNearest+10.0)){//pcf 返回可见性指标
count += 1.0;
}
}
float res = count/float(NUM_SAMPLES);
return res;
}
float PCSS(sampler2D shadowMap, vec4 coords){
float d_r = (coords.z+1.0)/2.0*Z_RANGE;// d_receiver
float pixelSize = 1.0/2048.0;
float d_b = 0.0;//d_blocker
float d_s = 0.0;//average d_reciver - d_blocker
float filterSize = 16.0;
// STEP 1: avgblocker depth
vec2 vB = findBlocker(shadowMap,coords.xy,d_r);
d_b = vB.x;
d_s = vB.y;
//return d_b/Z_RANGE;
//return d_s/Z_RANGE;
if(d_s<=EPS){
//不受遮挡,可见性为1
return 1.0;
}
// STEP 2: penumbra size
//float wp = pow(d_s / d_b,2.0) * LIGHT_WIDTH; // d_s / d_b* LIGHT_WIDTH;//
float wp = d_s / d_b* LIGHT_WIDTH;
//float wp = (dr/db-1.0) * L_WIDTH;
float penumbraPixelSize = wp/200.0/pixelSize;//200是正交相机里设定的窗口范围
//return penumbraPixelSize/100.0;
// STEP 3: filtering
//filterSize = penumbraPixelSize+8.0;
filterSize = penumbraPixelSize;
float res = PCF(shadowMap, coords, filterSize);
return res;
}
result:
PCF 64X64
PCSS

 浙公网安备 33010602011771号
浙公网安备 33010602011771号