

DBSCAN算法(转)
一、什么是DBSCAN算法
DBSCAN算法指定一个半径ε和一个数量M,它将空间中的点分成3种:核心点指在半径范围ε内含有超过M个相邻点的点;边界点指非核心点,但在核心点半径ε范围内的点;其余的点称为噪声。DBSCAN遍历每个点,判断每个点是否为核心点,寻找每个核心点周围的所有点,并将周围的点和相应核心点标记为同一个类别。
在遍历整个样本集的过程中,首先根据一个点的半径ε范围内的点的数量判断其是否为核心点。若是核心点,就将半径ε范围内的点和该点标记为同一类,并对每个周围的点做相同操作,再次查看是否为核心点。持续该过程,直到每个点都被遍历过。此时,未被分类的点就是噪声。DBSCAN算法需要对半径ε和阀值M进行调参。
没有进行DBSCAN算法:

图中的epsilon指的是半径,minPoints指的是在半径为1的空间里有四个小球即可扩散
进行过DBSCAN算法:
二、DBSCAN算法的算法步骤:
(1)计算所有点的ε邻域: 对于数据集中的每一个点P,计算其ε邻域中有多少个邻居。这个邻居数量的阈值通常由一个参数MinPts定义。
(2)标记核心点: 如果一个点的ε邻域中的点的数量大于或等于MinPts,那么这个点就被标记为核心点。
(3)寻找密度相连的点: 对于每一个核心点,寻找所有与其密度相连的点。如果点P在点O的ε邻域中,并且O是一个核心点,那么P就是一个与O密度相连的点。
(4)标记噪声点和边界点: 没有被标记为核心点的点被标记为噪声点。与某个核心点密度相连但不是核心点的点被标记为边界点。
为每一个核心点或与其密度相连的点赋予一个独立的簇标签: 为每一个核心点或与其密度相连的点赋予一个独立的簇标签。如果一个点与多个核心点密度相连,那么它将被赋予第一个找到的核心点的簇标签。
(5)噪声点形成独立的簇: 所有的噪声点形成一个独立的簇。
三、DBSCAN算法的优缺点如下:
优点如下所示:
1. 不需要预设聚类数:DBSCAN不需要事先指定聚类的数量,这使得算法更加灵活。
2. 识别噪声点:DBSCAN能够识别并处理噪声点,这对于包含异常值的数据集来说非常有用。
3. 任意形状的聚类:DBSCAN可以发现任意形状的聚类,不仅限于球形或圆形。
4. 密度基础:聚类是基于密度的连通性,这使得算法能够识别出由密度变化定义的聚类。
5. 参数较少:只需要设置两个参数(ε和MinPts),相比其他算法,参数调整较为简单。
缺点如下所示:
1. 参数敏感性:ε和MinPts的选取对聚类结果有很大影响,不恰当的参数可能导致聚类效果不佳。
2. 对高维数据效率低:随着数据维度的增加,计算邻域点的复杂度增加,导致算法效率降低。
3. 对均匀密度的数据效果不佳:如果数据集中的聚类具有相似的密度,DBSCAN可能无法很好地区分它们。
4. 边界点处理:DBSCAN对边界点的处理可能不如其他一些算法,因为它可能将边界点归入最近的聚类,这可能不是最优的。
5. 计算复杂度:对于大数据集,DBSCAN可能需要较长的运行时间,尤其是在计算每个点的ε邻域时。
6. 空间复杂度:在存储邻域信息时,DBSCAN可能需要较高的空间复杂度。
7. 对密度变化敏感:如果数据集中的聚类密度差异较大,DBSCAN可能将它们识别为不同的聚类,即使它们在其他方面是相似的。
8. 不适合大规模数据集:对于非常大的数据集,DBSCAN可能不是最佳选择,因为它需要存储和处理大量的邻域信息。
四、代码
1、使用Matplotlib观察所有样本根据连续值age、bmi和charges绘制的图像,相关代码如下:
import matplotlib.pyplot as plt # 定义一个函数用于绘制3D散点图 def graph3d(data, x, y, z): # 创建一个新的图形,并添加一个3D子图 ax = plt.figure().add_subplot(111, projection='3d') # 使用散点图绘制3D数据点 # s参数控制点的大小,c参数控制点的颜色,marker参数控制点的形状 ax.scatter(data[x], data[y], data[z], s=10, c='r', marker='.') # 设置x轴的标签 ax.set_xlabel(x) # 设置y轴的标签 ax.set_ylabel(y) # 设置z轴的标签 ax.set_zlabel(z) # 显示图形 plt.show() # 假设train是一个包含年龄、体重指数和医疗费用数据的DataFrame # 调用graph3d函数,绘制年龄、体重指数和医疗费用的3D散点图 # 这里假设'age', 'bmi', 'charges'是DataFrame train中的列名 graph3d(train, 'age', 'bmi', 'charges')
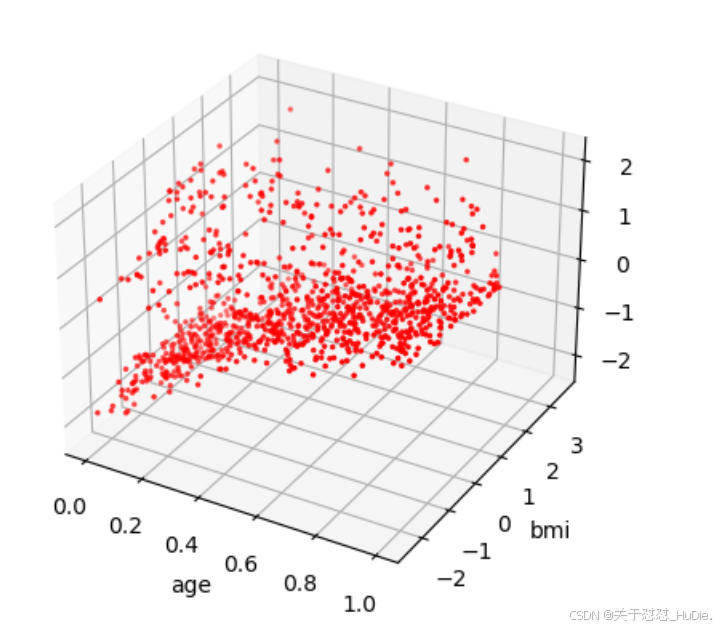
图6-4 空间中的分布
可以发现,数据大致分布于三个曲面。当数据具有明显的分层时,适合使用DBSCAN聚类方法对数据进行分类,从而对不同类别的样本分别进行分析。
2、DBSCAN算法需要对半径ε和阀值M进行调参。在本例中,由于需要将样本分为3类,因此调整ε=0.45,M=10,相关代码如下所示
import sklearn.cluster as cluster # 定义一个DBSCAN聚类函数,用于对数据进行聚类分析 def dbscan(data, features=None): # 创建DBSCAN聚类对象,eps是邻域的半径,min_samples是形成密集区的最小样本点数 clusterer = cluster.DBSCAN(eps=0.45, min_samples=10) # 如果指定了特征,则只使用这些特征进行聚类 x = data if (features): x = data[features] # 对数据进行聚类,并返回每个样本的聚类标签 y = clusterer.fit_predict(x.values) # 将聚类标签添加到原始数据中 data["type"] = y # 返回包含聚类标签的数据 return data # 从原始训练数据train中选择特定的列进行DBSCAN聚类分析 # 这里选择了'age', 'bmi', 'charges'这三列 train1 = train[['age', 'bmi', 'charges']].copy(deep=True) # 调用dbscan函数进行聚类,并将聚类结果的'type'列返回到原始训练数据train中 train["type"] = dbscan(train1)["type"] # 打印唯一的聚类标签,以查看数据被分为几个不同的聚类 print(train["type"].unique())
运行结果:

3、聚类的结果可以使用Matplotlib进行观察,相关代码如下所示:
import matplotlib.pyplot as plt import sklearn.cluster as cluster # 定义一个函数用于绘制3D散点图,展示聚类结果 def graph3dc(train, x, y, z, type_name='type'): # 创建一个新的图形,并添加一个3D子图 ax = plt.figure().add_subplot(111, projection='3d') # 根据聚类标签绘制不同颜色的散点图 # 假设聚类标签为0,绘制红色散点图 data = train[train[type_name] == 0] ax.scatter(data[x], data[y], data[z], s=10, c='r', marker='.') # 假设聚类标签为1,绘制绿色散点图 data = train[train[type_name] == 1] ax.scatter(data[x], data[y], data[z], s=10, c='g', marker='.') # 假设聚类标签为2,绘制蓝色散点图 data = train[train[type_name] == 2] ax.scatter(data[x], data[y], data[z], s=10, c='b', marker='.') # 设置x轴的标签 ax.set_xlabel(x) # 设置y轴的标签 ax.set_ylabel(y) # 设置z轴的标签 ax.set_zlabel(z) # 显示图形 plt.show() # 调用graph3dc函数,绘制年龄、体重指数和医疗费用的3D散点图,展示聚类结果 # 这里假设'age', 'bmi', 'charges'是DataFrame train中的列名,且'type'是聚类标签列 graph3dc(train, 'age', 'bmi', 'charges')
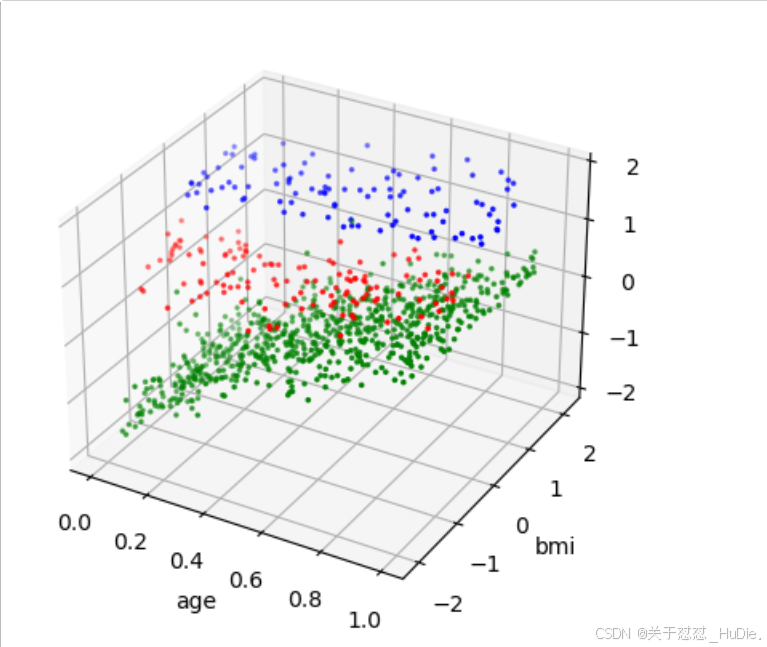
图6-5 聚类的结果
五、应用场景
DBSCAN算法的应用领域广泛,包括但不限于以下方面:
1. 地理信息系统(GIS):在地理信息系统中,DBSCAN可以用来识别城市中的不同区域,比如根据人口密度识别住宅区、商业区等。
2. 图像处理:在图像分割中,DBSCAN可以基于像素点的密度将图像中的不同区域分离开来,用于目标检测和图像分割。
3. 生物信息学:在基因表达数据分析中,DBSCAN可以用来识别基因表达模式的聚类,帮助研究者发现基因之间的相似性。
4. 客户细分:在市场分析中,DBSCAN可以用于客户细分,根据购买行为和偏好将客户分为不同的群体。
5. 网络安全:在网络安全领域,DBSCAN可以用于异常检测,比如识别网络流量中的异常模式或潜在的恶意活动。
6. 天文学:在天文学中,DBSCAN用于星系的聚类分析,帮助天文学家根据星系的分布和密度发现星系团。
7. 传感器网络:在传感器网络中,DBSCAN可以用于数据融合和异常检测,比如根据传感器读数识别异常的环境变化。 DBSCAN算法的优势在于它不需要预先指定簇的数量,能够处理噪声数据,并且能够发现任意形状的簇。然而,DBSCAN算法对参数选择较为敏感,特别是邻域半径(eps)和最小点数(minPts)的选择,这需要根据具体应用场景进行调整。
六、拓展部分
DBSCAN、分层聚类和K均值聚类比较:
分层聚类(Hierarchical Clustering):
原理:采用自底向上的方法,开始时将每个样本视为一个簇,然后逐步合并相近的簇,直到满足终止条件(如达到预设的簇数量或簇间的距离超过某个阈值)。
优点:能够生成一个具有层次结构的聚类树,便于观察和理解数据的聚类过程。同时,可以通过设置不同的终止条件来控制簇的数量和大小。
缺点:合并操作一旦完成就无法撤销,因此可能导致某些错误的合并。此外,当数据量较大时,计算复杂度较高,可能导致算法运行时间较长。
K均值聚类(K-Means Clustering):
原理:通过迭代的方式将数据划分为K个簇,使得每个样本点与其所属簇的中心点之间的距离之和最小。算法的核心是不断更新簇的中心点,直到达到收敛条件。
优点:原理简单易懂,计算效率高,尤其适用于大规模数据集。同时,K均值聚类能够发现球状簇,对于某些特定形状的数据集具有较好的聚类效果。
缺点:需要提前设定簇的数量K,不同的K值可能导致不同的聚类结果。此外,K均值聚类对初始簇中心的选择敏感,可能导致局部最优解而非全局最优解。同时,对于非凸形状的簇或噪声数据,K均值聚类的效果可能不佳。
4. 与K-means算法的对比:
与K-means算法的对比:K-means算法需要预定义聚类数量,且不能处理噪声数据或非凸形状的聚类,而DBSCAN算法则可以处理这些问题。

对噪声的敏感度:
DBSCAN:能够识别并处理噪声(图中未分配到任何簇的点)。它通过设置邻域的大小(eps)和最小样本点数(min_samples)来定义一个簇。如果一个点的邻域内没有足够的点,它将被标记为噪声。
k-means:没有明确的噪声处理机制。每个点都会被分配到最近的簇中心,即使这个点可能是一个异常值。
簇的形状:
DBSCAN:可以识别任意形状的簇,因为它是基于密度的。这意味着即使簇的形状不规则,DBSCAN也能够识别出来。
k-means:倾向于识别大小相似的球状簇。这是因为k-means通过最小化每个点到簇中心的距离(通常是欧几里得距离)来形成簇。
簇的数量:
DBSCAN:不需要预先指定簇的数量。算法会根据数据的密度自动确定簇的数量。
k-means:需要预先指定簇的数量(k值)。这可能会导致对数据的误解,如果选择的k值与数据的实际簇数量不匹配。
对初始条件的敏感度:
DBSCAN:对初始条件(如选择的邻域大小和最小样本点数)敏感,但对初始簇中心的选择不敏感。
k-means:对初始簇中心的选择非常敏感,不同的初始条件可能导致不同的聚类结果。
计算复杂度:
DBSCAN:计算复杂度较高,尤其是在处理大规模数据集时,因为它需要计算数据集中每一对点的距离。
k-means:计算复杂度相对较低,因为它主要涉及距离计算和簇中心的更新。
总结来说,这三种聚类算法各有优缺点,适用于不同的数据集和场景。在选择聚类算法时,需要根据数据的特性、聚类的目的以及算法的性能要求进行综合考虑。例如,当数据集中存在噪声或异常值时,DBSCAN可能是一个更好的选择;当需要观察数据的层次结构时,分层聚类可能更合适;而当数据量较大且需要快速得到聚类结果时,K均值聚类可能是一个更高效的选择。
————————————————
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/2201_75552078/article/details/144334352

 浙公网安备 33010602011771号
浙公网安备 33010602011771号