
数据结构——有序向量的查找与改进
有序向量的查找
查找
- 接口:tempalte
static Rank search(T* a,T const& e, Rank lo, Rank hi) - 语义规定:在有序向量的区间[lo, hi)内,确定不大于e的最后一个节点的秩
- 复杂度:若采用最朴素的二分策略,那么每次都将问题规模缩小一半左右,这样经过至多\(log_2(hi-lo)\)次迭代,复杂度不超过\(O(logn)\),而改进基本上是线性因子。
- 查找长度:查找算法执行元素大小比较操作的次数
虽然我们定义了一个通常会使用的语义,但是这里我们还是先分析几个安利,方便我们理解改进的方法
在前3个查找方法中,我们规定查找的语义为:在有序向量的区间[lo, hi)内,返回e的秩,若有多个相同值则返回最大的秩,若查询失败则返回-1
二分查找
原理:每次取lo与hi的终点,不停调整区间,经过至多两次比较可以完成一次迭代。
直到最后lo>=hi时(其实就是lo=hi),此时的区间宽度为0,表示查询失败了。

// 二分查找算法(版本A):在有序向量的区间[lo, hi)内查找元素e,0 <= lo <= hi <= _size
template <typename T> static Rank binSearch ( T* S, T const& e, Rank lo, Rank hi ) {
while ( lo < hi ) { //每步迭代可能要做两次比较判断,有三个分支
Rank mi = ( lo + hi ) >> 1; //以中点为轴点(区间宽度的折半,等效于宽度之数值表示的右移)
if ( e < S[mi] ) hi = mi; //深入前半段[lo, mi)继续查找
else if ( S[mi] < e ) lo = mi + 1; //深入后半段(mi, hi)继续查找
else return mi; //在mi处命中
} //成功查找可以提前终止
return -1; //查找失败
} //有多个命中元素时,不能保证返回秩最大者;查找失败时,简单地返回-1,而不能指示失败的位置
查询长度分析:
为了评定各个查询的细微差距,我们考察查询长度,同样有最好最坏和平均。
这里我们依旧考察平均查询长度:\(C_{average}(k)\)
设在长度为\(n=2^k-1\)的有序向量中进行查询
1、成功查询长度
递推基:
\(C_{average}(k)=C(1)=2\)
递推分析:对于成功查询,总共有三种情况
1.经过1次比较,问题转化为2^{k-1}-1的新问题;
2.经过2次比较,问题转化为2^{k-1}-1的新问题;
3.经过2次比较,在mid处命中,查询成功.
那么则有递推公式
令
则有
于是
进而得到
n趋于无穷时忽略末尾收敛的无穷小量平均查找长度为:
2、失败查询长度
当查询失败时,则一定会在\(lo \ge hi\)时结束运行,那么运行时一定每次都经历了2次比较,与上方证明成功查询类似可证:查询失败的查找长度也为\(O(1.5\cdot log_{2}n)\)
Fibonacci查找
虽然上一节的二分查找已经把平均查找长度降到了\(O(1.5\cdot log_{2}n)\),比遍历查询的方式快不少,但是仍有改进空间。
我们刚刚设计的二分查找算法看似是将数组平均分成两半,这看似是一种平衡的分割方式,但实际上由于进入两侧所需要的比较次数不同,因此其中蕴含着不平衡的因素。
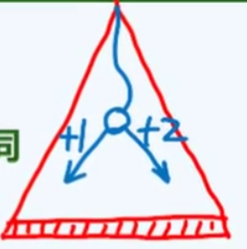
如图所示,在查找过程中,实际是向左侧查找成本更低,而右侧更高,因此我们得到了一个改进思路:将分割点向右侧移动,这样可以让低成本的操作执行次数更多,这对查找转向成本不平衡起到补偿作用。
在这里我们正好可以选择斐波那契数作为切分点,在这种策略下,这样切分的效率是最高的,这又一次展现出了黄金分割点的神奇。
假设向量长度为\(n=fib(k)-1\),则令切分点为\(fib(k-1)-1\)
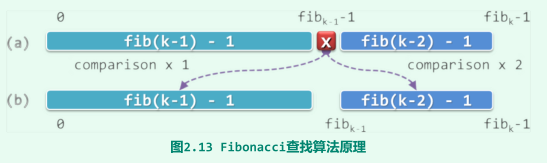
下面给出其查找长度的推导:
向量长度为\(n=fib(k)-1\),假设平均成功查找长度为\(C_{average}(k)\)
可以有两条边界条件式
递推公式为:
令
化简得
其中,\(\Phi=\frac{\sqrt{5}+1}{2}=1.618\)
于是
忽略末尾收敛的波动项,平均查找长度为:
这个相比于朴素的二分查找,效率略有提高。
#include "fibonacci/Fib.h" //引入Fib数列类
// Fibonacci查找算法(版本A):在有序向量的区间[lo, hi)内查找元素e,0 <= lo <= hi <= _size
template <typename T> static Rank fibSearch ( T* S, T const& e, Rank lo, Rank hi ) {
//用O(log_phi(n = hi - lo)时间创建Fib数列
for ( Fib fib ( hi - lo ); lo < hi; ) { //Fib数列制表备查;此后每步迭代仅一次比较、两个分支
while ( hi - lo < fib.get() ) fib.prev(); //自后向前顺序查找(分摊O(1))
Rank mi = lo + fib.get() - 1; //确定形如Fib(k) - 1的轴点
if ( e < S[mi] ) hi = mi; //深入前半段[lo, mi)继续查找
else if ( S[mi] < e ) lo = mi + 1; //深入后半段(mi, hi)继续查找
else return mi; //在mi处命中
} //成功查找可以提前终止
return -1; //查找失败
} //有多个命中元素时,不能保证返回秩最大者;失败时,简单地返回-1,而不能指示失败的位置
class Fib { //Fibonacci数列类
private:
int f, g; //f = fib(k - 1), g = fib(k)。均为int型,很快就会数值溢出
public:
Fib ( int n ) //初始化为不小于n的最小Fibonacci项
{ f = 1; g = 0; while ( g < n ) next(); } //fib(-1), fib(0),O(log_phi(n))时间
int get() { return g; } //获取当前Fibonacci项,O(1)时间
int next() { g += f; f = g - f; return g; } //转至下一Fibonacci项,O(1)时间
int prev() { f = g - f; g -= f; return g; } //转至上一Fibonacci项,O(1)时间
};
二分查找·改
在朴素的二分查找中,切分均等,但转向代价不均等;fibonacci查找用不均等切分补偿了转向代价的不均等。
那么我们可以换一种思路,也很容易想到,可以不可以使用一种专项条件均等的判断方式,使无论向左或向右,都只经历一次比较?答案是可以的。
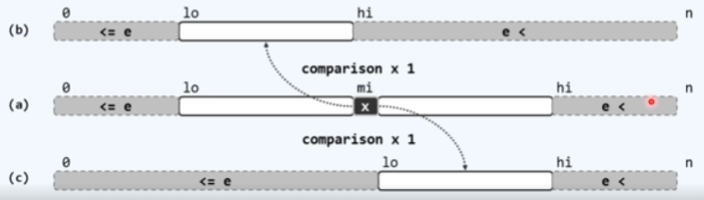
我们现在采用这种转换策略:只进行一次判断
1)\(e<x\):则e必然存在左侧区间\(S[lo,mi)\)中
2)\(x<=e\):则e必然存在左侧区间\(S[mi,high)\)中
这个策略的正确性是显而易见的

我们分析这个策略可以发现,他对于每一次查找,都必须深入到最深处,也就是说无论是最好情况还是最坏情况,他的查找长度都是一样的。
相对于朴素的二分查找,这种查找的最坏情况会更好(从\(O(1.5log_2n)\)变为\(O(log_{2}n)\)),但最好情况会更坏(从\(O(1)\)变为\(O(log_{2}n)\))。
假设\(n=2^k-1\)
解得通项公式为
n趋于无穷时去掉末尾收敛项
可以看到,前面的系数已经变为1了,这个策略的平均查找长度有了一些提升。
// 二分查找算法(版本B):在有序向量的区间[lo, hi)内查找元素e,0 <= lo < hi <= _size
template <typename T> static Rank binSearch ( T* S, T const& e, Rank lo, Rank hi ) {
while ( 1 < hi - lo ) { //每步迭代仅需做一次比较判断,有两个分支;成功查找不能提前终止
Rank mi = ( lo + hi ) >> 1; //以中点为轴点(区间宽度的折半,等效于宽度之数值表示的右移)
( e < S[mi] ) ? hi = mi : lo = mi; //经比较后确定深入[lo, mi)或[mi, hi)
} //出口时hi = lo + 1,查找区间仅含一个元素A[lo]
return e < S[lo] ? lo - 1 : lo; //返回位置,总是不超过e的最大者
} //有多个命中元素时,返回秩最大者;查找失败时,简单地返回-1,而不能指示失败的位置
二分查找·改二(符合原语语义)
刚才为了改进这个算法,我们研究了几种修改过语义的查找方法,而现在我们要实现最初所说的一个查找方法,但是这其实只需要对判断条件作出一点点修改,整体的策略是不变的,具体可以直接查看代码。
在如下代码中可以发现,我们查找的两个子区间分别是[lo, mi)和(mi, hi),这中间的元素mi并未被包含入子区间,但这并不是一个纰漏,而是一个巧妙的设计,下面证明他的正确性:
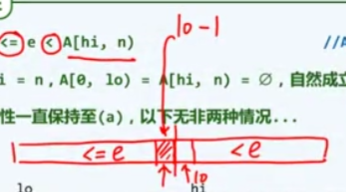
不变性:A[0,lo) <= e < A[hi,n)
初始时:lo=0 & hi=n, A[0,lo) = A[hi,n) = \(\varnothing\) 自然成立
单调性:在这个策略中,深入的子区间分别是[lo, mi)和(mi, hi),在各自区间内,仍严格满足不变性。
在算法执行的末尾,查询区间会被严格分割为两个部分(如下图所示),此时lo恰好指向<e的部分的头部,而lo-1则为我们要找的元素的秩。
template <typename T> static Rank binSearch ( T* S, T const& e, Rank lo, Rank hi ) {
while ( lo < hi ) { //每步迭代仅需做一次比较判断,有两个分支
Rank mi = ( lo + hi ) >> 1; //以中点为轴点(区间宽度的折半,等效于宽度之数值表示的右移)
( e < S[mi] ) ? hi = mi : lo = mi + 1; //经比较后确定深入[lo, mi)或(mi, hi)
} //成功查找不能提前终止
return lo - 1; //循环结束时,lo为大于e的元素的最小秩,故lo - 1即不大于e的元素的最大秩
} //有多个命中元素时,返回秩最大者;查找失败时,能够返回失败的位置
Fibonacci查找·改(符合原语语义)
#include "fibonacci/Fib.h" //引入Fib数列类
// Fibonacci查找算法(版本B):在有序向量的区间[lo, hi)内查找元素e,0 <= lo <= hi <= _size
template <typename T> static Rank fibSearch ( T* S, T const& e, Rank lo, Rank hi ) {
for( Fib fib ( hi - lo ); lo < hi; ) { //Fib数列制表备查
while( hi - lo < fib.get() ) fib.prev(); //自后向前顺序查找(分摊O(1))
Rank mi = lo + fib.get() - 1; //确定形如Fib(k) - 1的轴点
( e < S[mi] ) ? hi = mi : lo = mi + 1; //比较后确定深入前半段[lo, mi)或后半段(mi, hi)
} //成功查找不能提前终止
return --lo; //循环结束时,lo为大于e的元素的最小秩,故lo - 1即不大于e的元素的最大秩
} //有多个命中元素时,总能保证返回最秩最大者;查找失败时,能够返回失败的位置
参考资料
学堂在线——数据结构(上)2021秋(清华大学.邓俊辉)
课本、源码以及MOOC课程

 浙公网安备 33010602011771号
浙公网安备 33010602011771号