GRPO (Group Relative Policy Optimization )
GRPO
https://arxiv.org/pdf/2402.03300
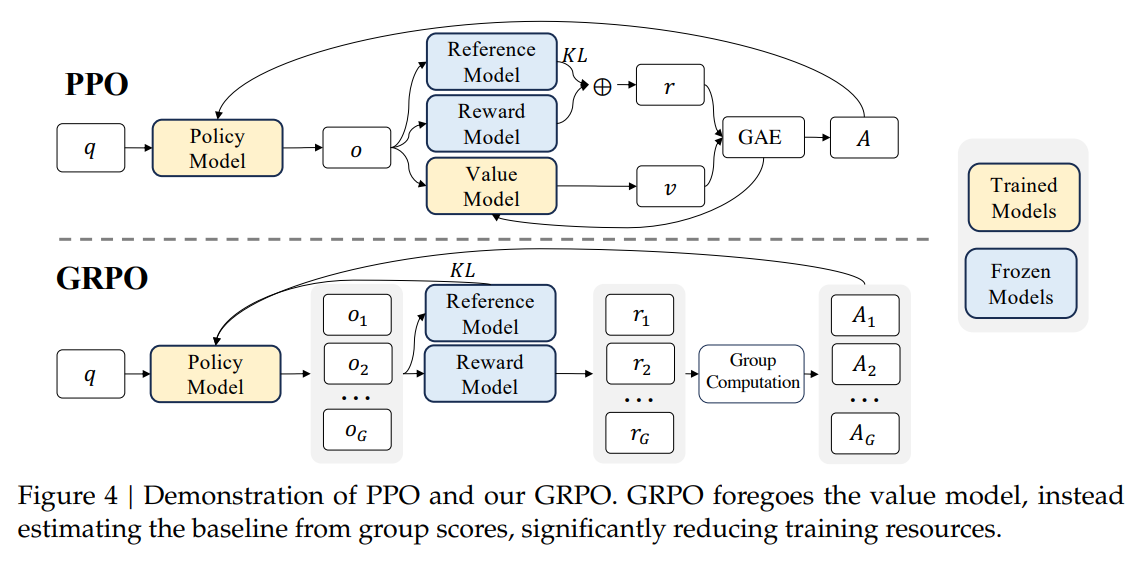
对于每个question q,GRPO从old policy \(\pi_{old}\) 采样一组输出 \({o_1, o_2 ...,o_G}\)
优化下面的objective以获得新的policy
\[J_{GRPO}(\theta) =E \left [ q \sim P(q), \{o_i \}^G_{i=1} \sim \pi_{\theta_{old}} (O | q) \right ]
\\
\frac{1}{G} \sum^{G}_{i=1} \frac{1}{|o_i|} \sum^{|o_i|}_{t=1} \{ \min \left [
\frac{\pi_\theta(o_{i,t}|q,o_{i,<t})}{\pi_{\theta_{old}}(o_{i,t}|q,o_{i,<t})}\hat{A}_{i,t},
clip(\frac{\pi_\theta(o_{i,t}|q,o_{i,<t})}{\pi_{\theta_{old}}(o_{i,t}|q,o_{i,<t})}, 1-\epsilon,1+\epsilon)\hat{A}_{i,t}
\right ]
-\beta D_{KL} \left [ \pi_{\theta} || \pi_{ref} \right]
\}
\]
\[D_{KL} \left [ \pi_{\theta}||\pi_{ref} \right] =
\frac{\pi_{ref}(o_{i,t} | q,o_{i, <t})}{\pi_{\theta}(o_{i,t} | q,o_{i, <t})} -
\log \frac{\pi_{ref}(o_{i,t} | q,o_{i, <t})}{\pi_{\theta}(o_{i,t} | q,o_{i, <t})} -1
\]
其中,\(\epsilon\)和\(\beta\)为超参数,\(\hat{A}_{i,t}\)是advantage。
采用reward modle对这些输出进行打分,生成对应的G的reward \(r = {r_1, r_2, ..., r_G}\)
对r进行标准化,得到对于每个输出\(o_i\)结束后的reward标准化advantage \(\hat{A}_{i,t}\),并根据上面objective对policy进行优化
\[\hat{A}_{i,t} = \tilde{r_i}=\frac{r_i-mean(r)}{std(r)}
\]
概括:根据old policy得到一组输出,计算输出的advantage,据此计算新的policy所需要的优化方向,也就是policy gradient。
所谓policy的old与new,即固定下的策略和正在更新的策略。通过对old policy进行采样,可以进行多步探索,但又通过clip使得更新幅度不过大,保证了数值的稳定性。计算同一组数据在新policy下的概率,得到新policy下的loss,更新新的policy让其相比旧policy能够提升objective。
Loss
https://github.com/huggingface/open-r1/issues/239#issuecomment-2646297851
观察objective,对于某prompt
如果假设每次迭代仅执行一步探索,此时也就是\(\pi_{\theta_{old}} = \pi_{\theta}\),用同一个policy进行采样,计算advantage并且更新这个policy
则objective
\[J_{\text{GRPO}}(\theta) = \frac{1}{G} \sum_{i=1}^{G} \frac{1}{|o_i|} \sum_{t=1}^{|o_i|} \Bigg[ \min \left( \frac{\pi_{\theta}(o_{i,t} \mid q, o_i, < t)}{\pi_{\theta}(o_{i,t} \mid q, o_i, < t)} \hat{A}_{i,t}, \right. \left. \text{clip} \left( \frac{\pi_{\theta}(o_{i,t} \mid q, o_i, < t)}{\pi_{\theta}(o_{i,t} \mid q, o_i, < t)}, 1-\epsilon, 1+\epsilon \right) \hat{A}_{i,t} \right) \\- \beta D_{\text{KL}}[\pi_{\theta} \parallel \pi_{\text{ref}}] \Bigg]
\\
= \frac{1}{G} \sum_{i=1}^{G} \frac{1}{|o_i|} \sum_{t=1}^{|o_i|} \left[ \min \left( \hat{A}_{i,t}, \text{clip}(1,1-\epsilon,1+\epsilon) \hat{A}_{i,t} \right) - \beta D_{\text{KL}}[\pi_{\theta} \parallel \pi_{\text{ref}}] \right]
\\
= \frac{1}{G} \sum_{i=1}^{G} \frac{1}{|o_i|} \sum_{t=1}^{|o_i|} \left[ \min \left( \hat{A}_{i,t}, \hat{A}_{i,t} \right) - \beta D_{\text{KL}}[\pi_{\theta} \parallel \pi_{\text{ref}}] \right]
\\
= \frac{1}{G} \sum_{i=1}^{G} \frac{1}{|o_i|} \sum_{t=1}^{|o_i|} \left[ \hat{A}_{i,t} - \beta D_{\text{KL}}[\pi_{\theta} \parallel \pi_{\text{ref}}] \right]
\\
= \frac{1}{G} \sum_{i=1}^{G} \frac{1}{|o_i|} \sum_{t=1}^{|o_i|} \hat{A}_{i,t} - \frac{1}{G} \sum_{i=1}^{G} \beta D_{\text{KL}}[\pi_{\theta} \parallel \pi_{\text{ref}}]
\]
Advantage \(A\) 不依赖于某个具体token \(t\),
\[\frac{1}{|o_i|} \sum_{t=1}^{|o_i|} \hat{A}_{i,t} = \frac{1}{|o_i|} \sum_{t=1}^{|o_i|} \hat{A}_i = \hat{A}_i
\]
此外,\(\hat{A}_t\) 由标准化可知
\[\frac{1}{G} \sum_{i=1}^{G} \frac{1}{|o_i|} \sum_{t=1}^{|o_i|} \hat{A}_{t} = 0
\]
因此
\[J_{\text{GRPO}}(\theta) = - \frac{1}{G} \sum_{i=1}^{G} \beta D_{\text{KL}}[\pi_{\theta} \parallel \pi_{\text{ref}}]
\]
实际训练loss与KL有关。
梯度
https://arxiv.org/pdf/2402.03300
同样进行一步探索,假设\(\pi_{\theta_{\text{old}}} = \pi_{\theta}\)
\[J_{\text{GRPO}}(\theta) = \mathbb{E} \big[q \sim p_{\text{sft}}(Q), \{o_i\}_{i=1}^{G} \sim \pi_{\theta_{\text{old}}}(O|q) \big]
\\
\frac{1}{G} \sum_{i=1}^{G} \frac{1}{|o_i|} \sum_{t=1}^{|o_i|} \left[
\frac{\pi_{\theta}(o_{i,t} | q, o_{i,<t})}{\pi_{\theta_{\text{old}}}(o_{i,t} | q, o_{i,<t})}
\hat{A}_{i,t} - \beta \left( \frac{\pi_{\text{ref}}(o_{i,t} | q, o_{i,<t})}{\pi_{\theta}(o_{i,t} | q, o_{i,<t})} - \log \frac{\pi_{\text{ref}}(o_{i,t} | q, o_{i,<t})}{\pi_{\theta}(o_{i,t} | q, o_{i,<t})} - 1 \right)
\right]
\]
求梯度,对于中间部分
\[\nabla_{\theta} [\frac{\pi_\theta}{\pi_{\theta_{old}}}A-\beta(\frac{\pi_{ref}}{\pi_\theta}-\log \frac{\pi_{ref}}{\pi_\theta} -1)]
\\
= \nabla_{\theta} [\frac{\pi_\theta}{\pi_{\theta_{old}}}A-\beta(\frac{\pi_{ref}}{\pi_\theta}+\log \pi_\theta)]
\\
= \frac{\nabla_{\theta}\pi_\theta}{\pi_{\theta_{old}}}A - \beta (-\frac{\pi_{ref}}{\pi_\theta}\frac{\nabla_{\theta}\pi_\theta}{\pi_\theta} + \frac{\nabla_{\theta}\pi_\theta}{\pi_\theta})
\\
= \frac{\nabla_{\theta}\pi_\theta}{\pi_\theta}(A+\beta(\frac{\pi_{ref}}{\pi_\theta}-1))
\\
=(A+\beta(\frac{\pi_{ref}}{\pi_\theta}-1))\nabla_{\theta}\log \pi_\theta
\]
得到
\[\nabla_{\theta} J_{\text{GRPO}}(\theta) = \mathbb{E} \big[q \sim p_{\text{sft}}(Q), \{o_i\}_{i=1}^{G} \sim \pi_{\theta_{\text{old}}}(O|q) \big]
\\
\frac{1}{G} \sum_{i=1}^{G} \frac{1}{|o_i|} \sum_{t=1}^{|o_i|} \left[
\hat{A}_{i,t} + \beta \left( \frac{\pi_{\text{ref}}(o_{i,t} | q, o_{i,<t})}{\pi_{\theta}(o_{i,t} | q, o_{i,<t})} - 1 \right)
\right] \nabla_{\theta} \log \pi_{\theta}(o_{i,t} | q, o_{i,<t})
\]
其中,\(\nabla_{\theta} \log \pi_{\theta}(o_{i,t} | q, o_{i,<t})\)是policy采样logits梯度,而梯度系数(Gradient Coefficient)为
\[GC_{GRPO}(q,o,t,\pi_{\theta_{rm}}) = \hat{A}_{i,t} + \beta \left( \frac{\pi_{\text{ref}}(o_{i,t} | q, o_{i,<t})}{\pi_{\theta}(o_{i,t} | q, o_{i,<t})} - 1 \right)
\]
实现
https://github.com/huggingface/trl
https://github.com/huggingface/trl/blob/main/trl/trainer/grpo_trainer.py
trl中关于gpro的实现
def compute_loss(self, model, inputs, return_outputs=False, num_items_in_batch=None):
...
# Compute the KL divergence between the model and the reference model
ref_per_token_logps = inputs["ref_per_token_logps"]
per_token_kl = torch.exp(ref_per_token_logps - per_token_logps) - (ref_per_token_logps - per_token_logps) - 1
# x - x.detach() allows for preserving gradients from x
advantages = inputs["advantages"]
per_token_loss = torch.exp(per_token_logps - per_token_logps.detach()) * advantages.unsqueeze(1)
per_token_loss = -(per_token_loss - self.beta * per_token_kl)
loss = ((per_token_loss * completion_mask).sum(dim=1) / completion_mask.sum(dim=1)).mean()
...
return loss
方法来自一步探索,
有\(\pi_{\theta_{\text{old}}} = \pi_{\theta}\)
\[J_{\text{GRPO}}(\theta) = \frac{1}{G} \sum_{i=1}^{G} \frac{1}{|o_i|} \sum_{t=1}^{|o_i|} \Bigg[ \min \left( \frac{\pi_{\theta}(o_{i,t} \mid q, o_i, < t)}{\pi_{\theta_{old}}(o_{i,t} \mid q, o_i, < t)} \hat{A}_{i,t}, \right. \left. \text{clip} \left( \frac{\pi_{\theta}(o_{i,t} \mid q, o_i, < t)}{\pi_{\theta_{old}}(o_{i,t} \mid q, o_i, < t)}, 1-\epsilon, 1+\epsilon \right) \hat{A}_{i,t} \right) \\- \beta D_{\text{KL}}[\pi_{\theta} \parallel \pi_{\text{ref}}] \Bigg]
\\
= \frac{1}{G} \sum_{i=1}^{G} \frac{1}{|o_i|} \sum_{t=1}^{|o_i|} ( \frac{\pi_\theta}{\pi_{\theta_{old}}} \hat{A}_{i,t} - \beta D_{\text{KL}}[\pi_{\theta} \parallel \pi_{\text{ref}}])
\]
将objective转成loss
代码中
per_token_loss = torch.exp(per_token_logps - per_token_logps.detach()) * advantages.unsqueeze(1)
torch.exp(per_token_logps - per_token_logps.detach())的值恒为1,对应$ \frac{\pi_\theta}{\pi_{\theta_{old}}}$,保留以便梯度传播。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号