Numpy平移,旋转,镜像操作
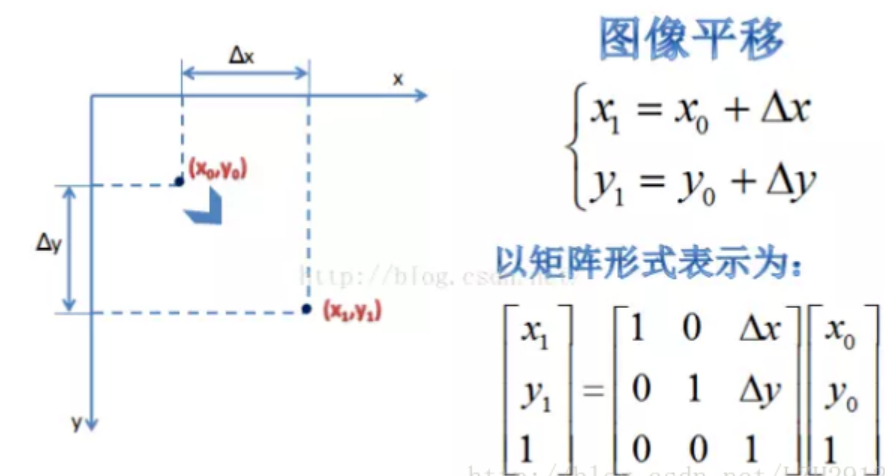
一、图像平移
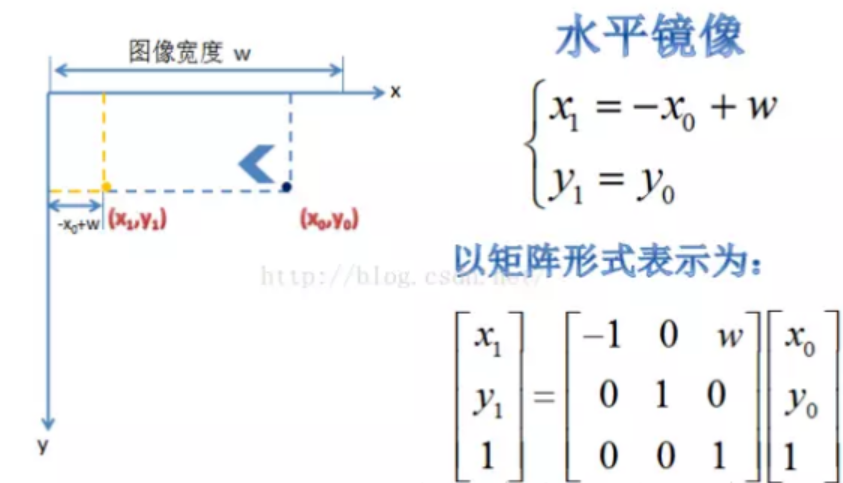
二、图像水平镜像
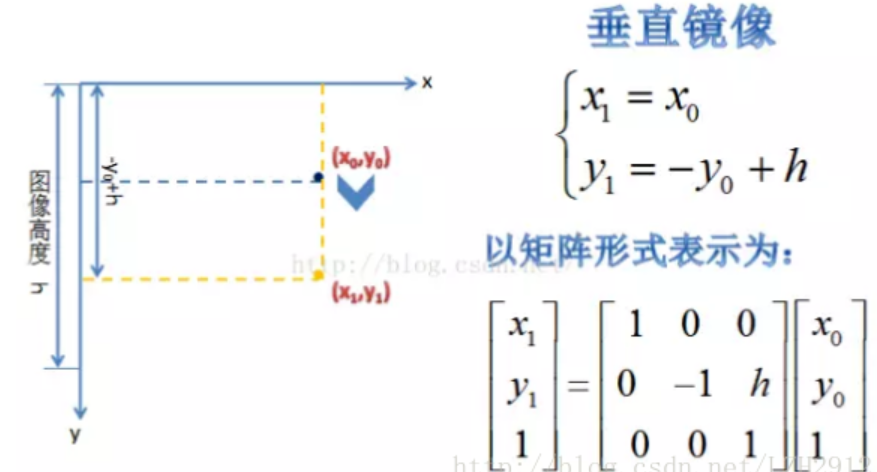
三、图像垂直镜像
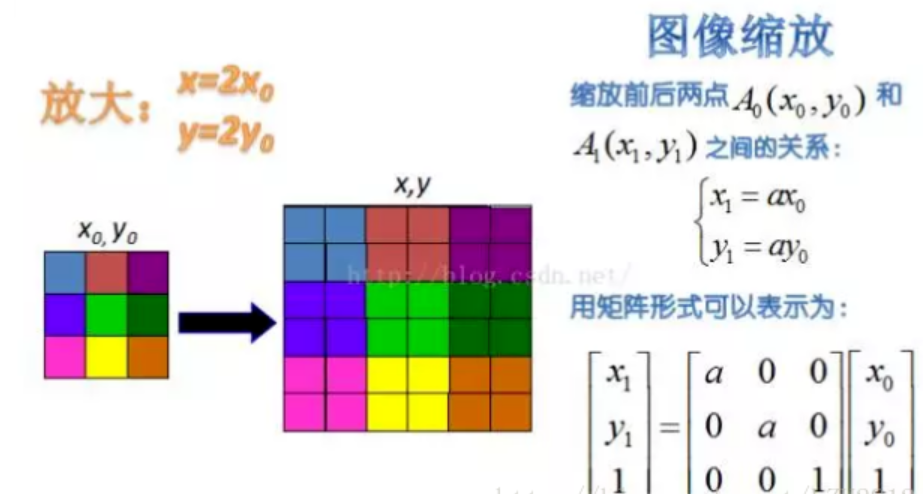
四、图像缩放
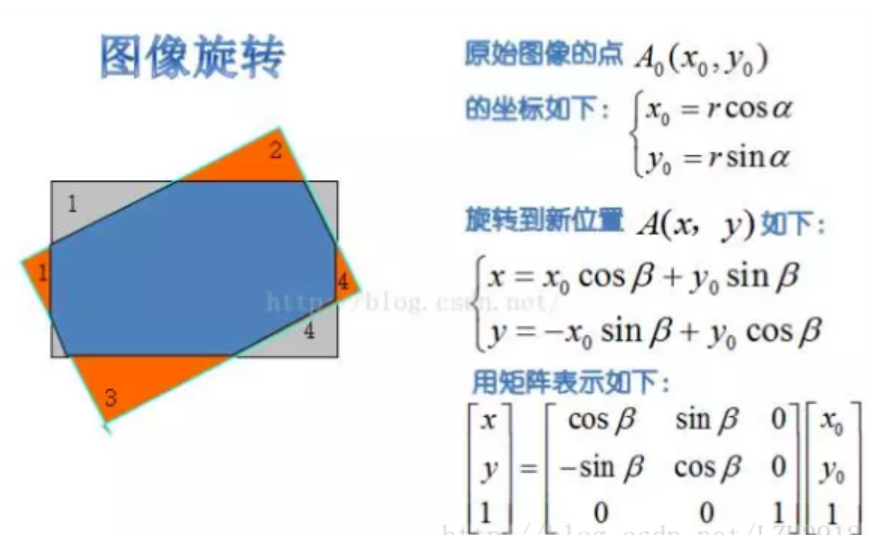
五、图像旋转(顺时针)
正确代码:
import cv2
import math
import numpy as np
class Img:
def __init__(self,image,rows,cols,center=[0,0]):
self.src=image #原始图像
self.rows=rows #原始图像的行
self.cols=cols #原始图像的列
self.center=center #旋转中心,默认是[0,0]
def Move(self,delta_x,delta_y): #平移
#delta_x>0左移,delta_x<0右移
#delta_y>0上移,delta_y<0下移
self.transform=np.array([[1,0,delta_x],[0,1,delta_y],[0,0,1]])
def Zoom(self,factor): #缩放
#factor>1表示缩小;factor<1表示放大
self.transform=np.array([[factor,0,0],[0,factor,0],[0,0,1]])
def Horizontal(self): #水平镜像
self.transform=np.array([[1,0,0],[0,-1,self.cols-1],[0,0,1]])
def Vertically(self): #垂直镜像
self.transform=np.array([[-1,0,self.rows-1],[0,1,0],[0,0,1]])
def Rotate(self,beta): #旋转
#beta>0表示逆时针旋转;beta<0表示顺时针旋转
self.transform=np.array([[math.cos(beta),-math.sin(beta),0],
[math.sin(beta), math.cos(beta),0],
[ 0, 0, 1]])
def Process(self):
self.dst=np.zeros((self.rows,self.cols),dtype=np.uint8)
for i in range(self.rows):
for j in range(self.cols):
src_pos=np.array([i-self.center[0],j-self.center[1],1])
[x,y,z]=np.dot(self.transform,src_pos)
x=int(x)+self.center[0]
y=int(y)+self.center[1]
if x>=self.rows or y>=self.cols or x<0 or y<0:
self.dst[i][j]=255
else:
self.dst[i][j]=self.src[x][y]
if __name__=='__main__':
src=cv2.imread('.\jay.bmp',0)
rows = src.shape[0]
cols = src.shape[1]
cv2.imshow('src', src)
img=Img(src,rows,cols,[248,231])
img.Vertically() #镜像
img.Process()
'''
img.Rotate(-math.radians(30)) #旋转
img.Process()
img.Move(-50,-50) #平移
img.Process()
img.Zoom(0.5) #缩放
img.Process()
'''
cv2.imshow('dst', img.dst)
cv2.waitKey(0)
旋转易错点:

原始图 beta=-30°
再Rotate的函数中,我们的transform矩阵完全是按照beta>0时为为逆时针旋转。但是我们需要注意到 时process:self.dst[i][j]=self.src[x][y];相当于又一次取反。最终,当beta>0时,我们是顺时针旋转。
这个时候你可能产生疑问,我直接写成:self.dst[x,y]=self.src[i,j]不就是逆时针的了????
结果如下:
原因分析:可能是因为在遍历过程中dst的元素无法全部访问到,会保留默认的像素值为0的点。
六、旋转延拓
上述方法的旋转之后的图像大小与原图像大小相等,接下来我们来看一个完全保留旋转后图像的方法:
import cv2
import math
import numpy as np
def XRotate(image, angle):
h, w = image.shape
anglePi = angle * math.pi / 180.0
cosA = math.cos(anglePi)
sinA = math.sin(anglePi)
X1 = math.ceil(abs(0.5 * h * cosA + 0.5 * w * sinA))
X2 = math.ceil(abs(0.5 * h * cosA - 0.5 * w * sinA))
Y1 = math.ceil(abs(-0.5 * h * sinA + 0.5 * w * cosA))
Y2 = math.ceil(abs(-0.5 * h * sinA - 0.5 * w * cosA))
hh = int(2 * max(Y1, Y2))
ww = int(2 * max(X1, X2))
emptyImage2 = np.zeros((hh, ww), np.uint8)
for i in range(hh):
for j in range(ww):
x = cosA * i + sinA * j - 0.5 * ww * cosA - 0.5 * hh * sinA + 0.5 * w
y = cosA * j- sinA * i+ 0.5 * ww * sinA - 0.5 * hh * cosA + 0.5 * h
x = int(x)
y = int(y)
if x > -1 and x < h and y > -1 and y < w :
emptyImage2[i, j] = image[x, y]*255
return emptyImage2
# image = cv2.imread("e:\\lena.bmp")
iXRotate12 = XRotate(img[:,:,1], 30)
cv2.imshow('image', img)
cv2.imshow('iXRotate12', iXRotate12)
cv2.waitKey(0)
代码解释:X1, X2, Y1, Y2的求解是考虑到了beta的正负;其次在两层的for循环里,cosA * i + sinA * j代表我们的transform矩阵是顺时针旋转;- 0.5 * ww * cosA - 0.5 * hh * sinA + 0.5 * w代表的是:根据图像中心进行旋转;同样的,由于我们 emptyImage2[i, j] = image[x, y]*255 操作,我们transform虽然是按照顺时针生成,但是最终结果会相反一下,为逆时针。
原始图像 旋转之后

 浙公网安备 33010602011771号
浙公网安备 33010602011771号