EfficientFormer:轻量化ViT Backbone
论文:《EfficientFormer: Vision Transformers at MobileNet Speed 》
Vision Transformers (ViT) 在计算机视觉任务中取得了快速进展,开启了 Vision + Transformer 的先河,之后大量的论文和研究都基于 ViT 之上的。不过呢,Transformer 由于 Attention 的结构设计需要大量的参数,执行的性能也比经过特殊优化的 CNN 要慢一点。
像是之前介绍的 DeiT 利用 ViT + 蒸馏让训练得更快更方便,但是没有解决 ViT 在端侧实时运行的问题。于是后来有了各种 MateFormer、PoolFormer 等各种 XXXFormer 的变种。应该在不久之前呢,Facebook 就提出了 mobilevit,借鉴了端侧 YYDS 永远的神 mobileNet 的优势结构和 Block(CNN) + ViT 结合,让 ViT 开启了端侧可运行的先河。不管是 XXXFormer 还是 mobileNet,主要是试图通过网络架构搜索(AutoML)或与 MobileNet 块的混合设计来降低 ViT 的计算复杂度,但推理速度嘛,还是没办法跟 mobileNet 媲美。
这就引出了一个重要的问题:Transformer 能否在获得高性能的同时跑的跟 MobileNet 一样快?
作者重新审视基于 ViT 的模型中使用的网络架构和具体的算子,找到端侧低效的原因。然后引入了维度一致的 Transformer Block 作为设计范式。最后,通过网络模型搜索获得不同系列的模型 —— EfficientFormer。
ViT 实时运行分析
图中作者作者对不同模型在端侧运行进行了一些分析,主要是分为 ViT 对图像进行分块的 Patch Embedding、Transformer 中的 Attention 和 MLP,另外还有 LeViT 提出的 Reshape 和一些激活等。基于下面这个表,提出了几个猜想,然后设计出了 EfficientFormer 结构。

- 猜想分析1:大 kernel 和 stride 的Patch embedding是速度瓶颈
Patch embedding 通常使用具有较大kernel-size和stride的非重叠卷积层来实现。大部分AI编译器都不能很好地支持大内核卷积,并且无法通过 Winograd 等现有算法进行加速。
- 猜想分析2:特征维度一致对于 token mixer 的选择很重要
很多翻译这里写得很玄乎,ZOMI酱的理解是特征维度一致比多头注意力机制对延迟的影响更重要啦,也就是 MLP 实际上并没有那么耗时,但是如果 tensor 的shape一会大一会小,就会影响计算时延。所以 EfficientFormer 提出了具有 4D 特征实现和 3D 多头注意力的维度一致网络,并且消除了低效且频繁 Reshape 操作(主要指 LeViT 中的 Reshape 操作)。
- 猜想分析3:CONV + BN 比 MLP + LN 效率更高
在 CNN 结构中最经典的就是使用3x3卷积 Conv + Batch Normalization(BN)的组合方式(获取局部特征),而在 Transformer 中最典型的方式是使用 linear projection(MLP)+ layer normalization(LN)(获取全局特征)的组合。不过作者对比测试中发现呀,CONV + BN 比 MLP + LN 效率更高。
- 猜想分析4:激活函数取决于编译器
最后这个就比较简单,激活函数包括 GeLU、ReLU 和 HardSwish 的性能在 TensorRT 或者 CoreML 中都不一样,所以激活的优化主要是看用什么端侧编译器。
EfficientFormer 架构
第4个点不太重要,主要是关注1,2,3点。于是引出了 EfficientFormer 的总结架构啦。 EfficientFormer 由 patch embedding (PatchEmbed) 和 meta transformer blocks 组成,表示为 MB:
X_0 是输入图像,Batch Size 为 B,featur map 大小为 [H,W],Y 是输出,m 是Block的数量。MB 由未指定的 TokenMixer 和 MLP Block 组成,可以表示如下:
X_i 是第 i 个 MB 的featur map。进一步将 Stage 定义为处理具有相同空间大小的特征的几个 MetaBlock 的堆栈,图 N_1x 表示 S1 具有 N_1 个 MetaBlock。
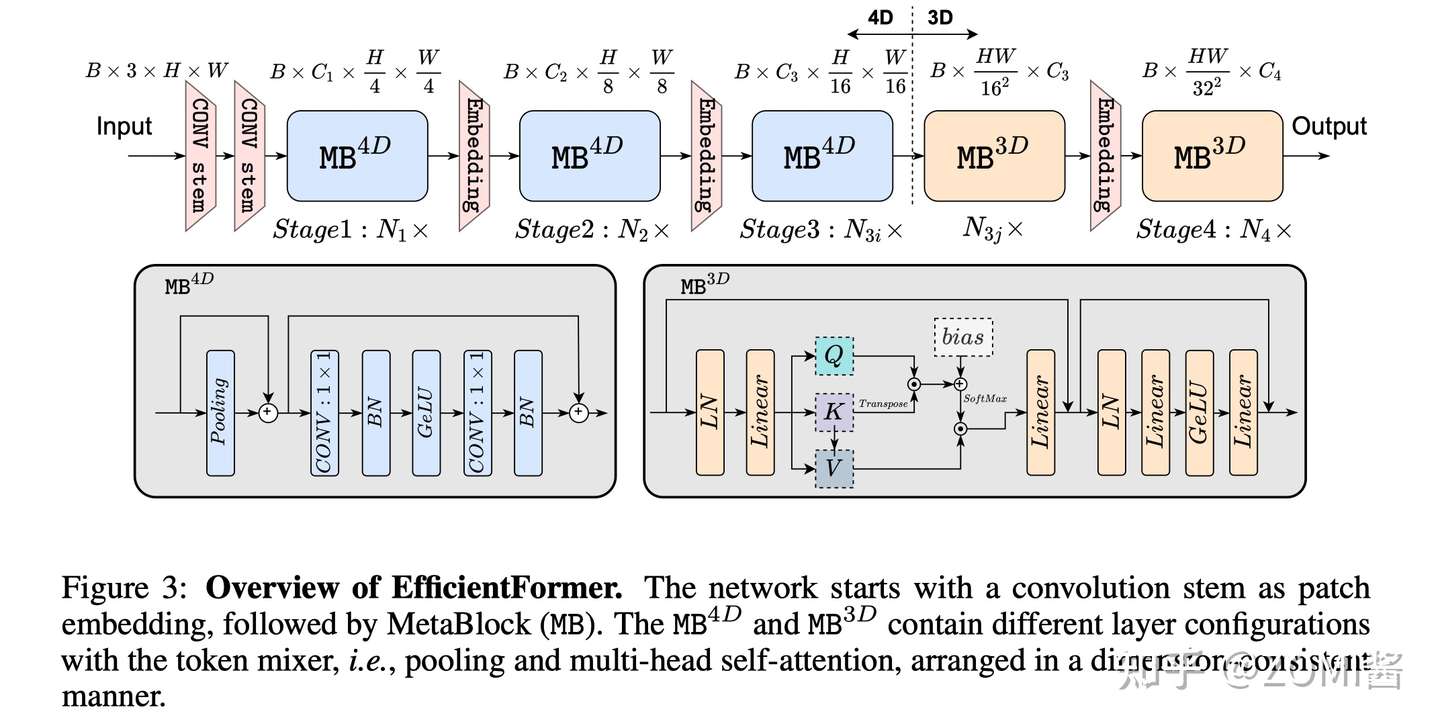
可以看到 EfficientFormer 一共有4个阶段。每个阶段都有一个 Embeding(两个3x3的Conv组成一个Embeding) 来投影 Token 长度(可以理解为CNN中的feature map)。可以看到啦,EfficientFormer 是一个完全基于Transformer设计的模型,没有集成 MobileNet 相关内容啦。
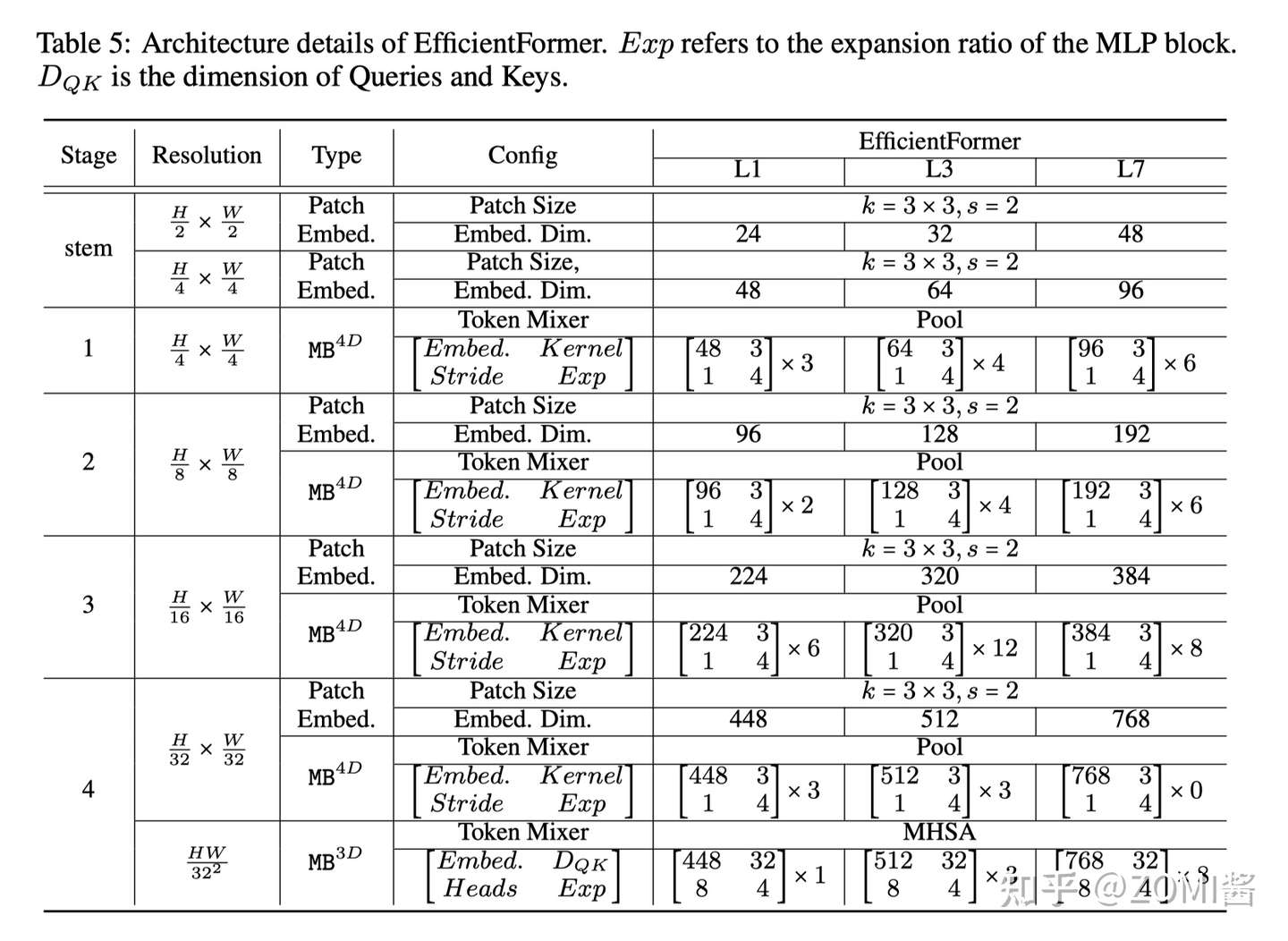
最后通过 AUTOML 来搜索 MB_3D 和 MB_4D block 相关参数。
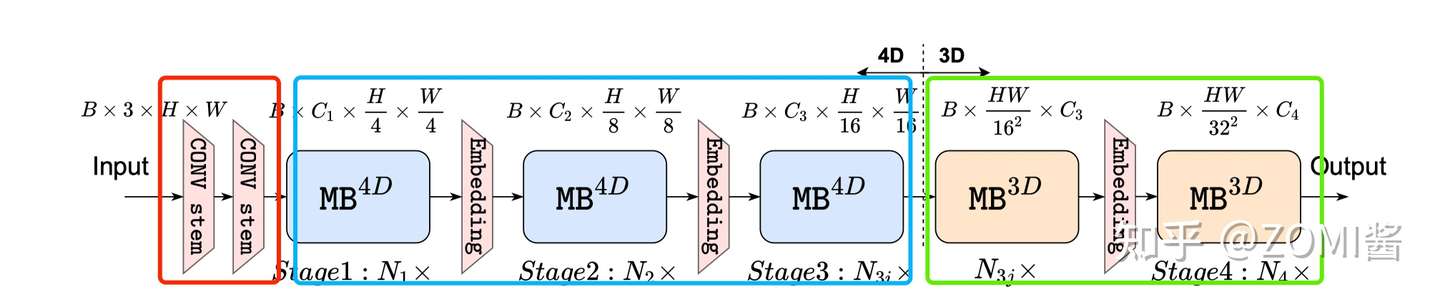
维度一致性 dimension-consistent
根据 猜想分析2:特征维度一致对于 token mixer 的选择很重要 EfficientFormer 提出了一种维度一致的设计,将网络分成一个 MB_4D,以 CNN 结构为主 (MB4D) 实现;以及一个 MB_3D ,MLP 线性投影和 Attention 注意力在 3D tensor 上运行。网络从 patch embedding 开始,然后就到了 4D 分区,3D 分区在最后阶段应用。最后 4D 和 3D 分区的实际长度是稍后通过架构搜索指定的。
这里面的 4D 主要是指 CNN 结构中 tensor 的维度 [B, C, W, H],而 3D 主要是指 Tran 结构中 tensor 的维度 [B, W, H]。
网络从使用由具有2个 kernel-size为 3×3, Stride=2 的卷积组成的 Conv stem 处理后的图像作为 patch embedding:
其中 C_j 是第 j 个阶段的通道数(宽度)。然后网络从 MB_4D 开始,使用简单的 Pool ing 来提取 low level特征:
其中 Conv_B,G 是指卷积后是否分加上BN和GeLU。
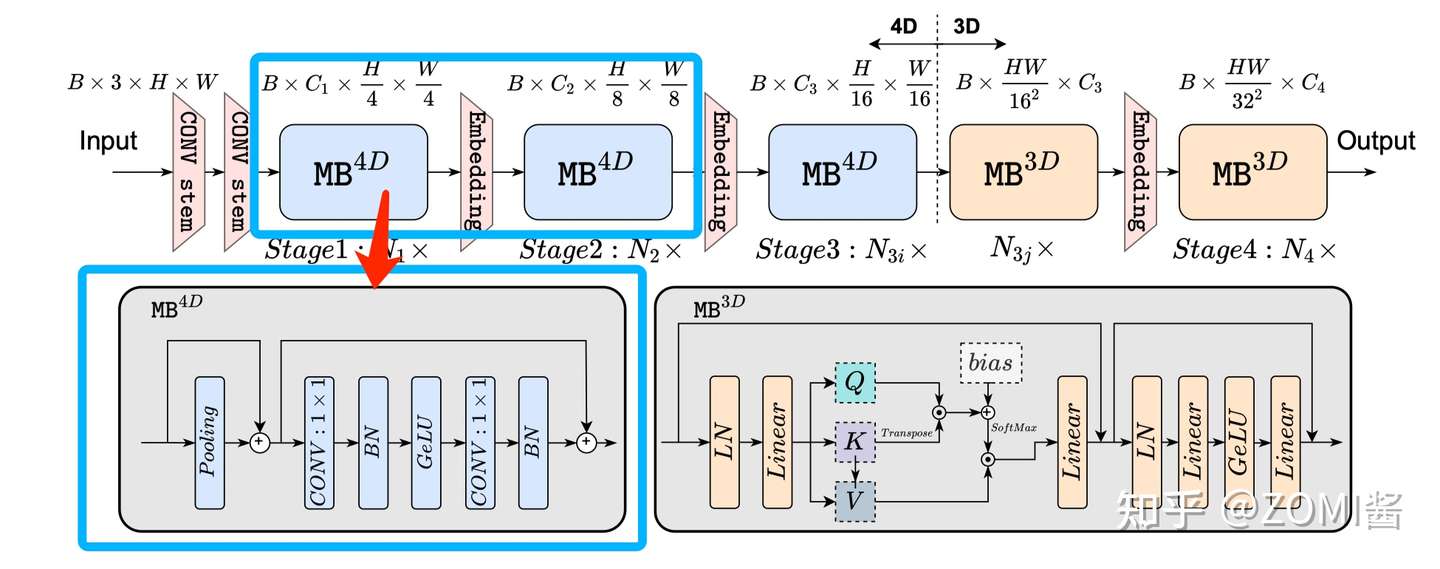
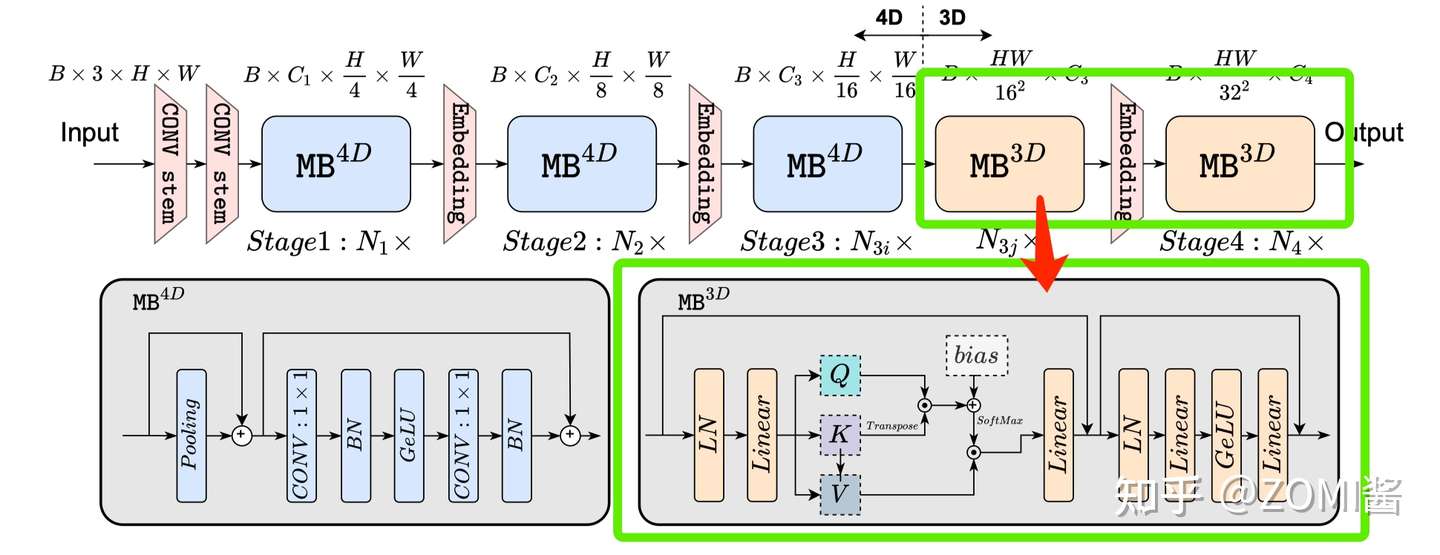
在处理完所有 MB4D 块后,执行一次Reshape以变换 freature map 并进入 3D 分区。MB3D 遵循传统的 ViT,不过作者把 ReLU 换成了 GeLU 哦。
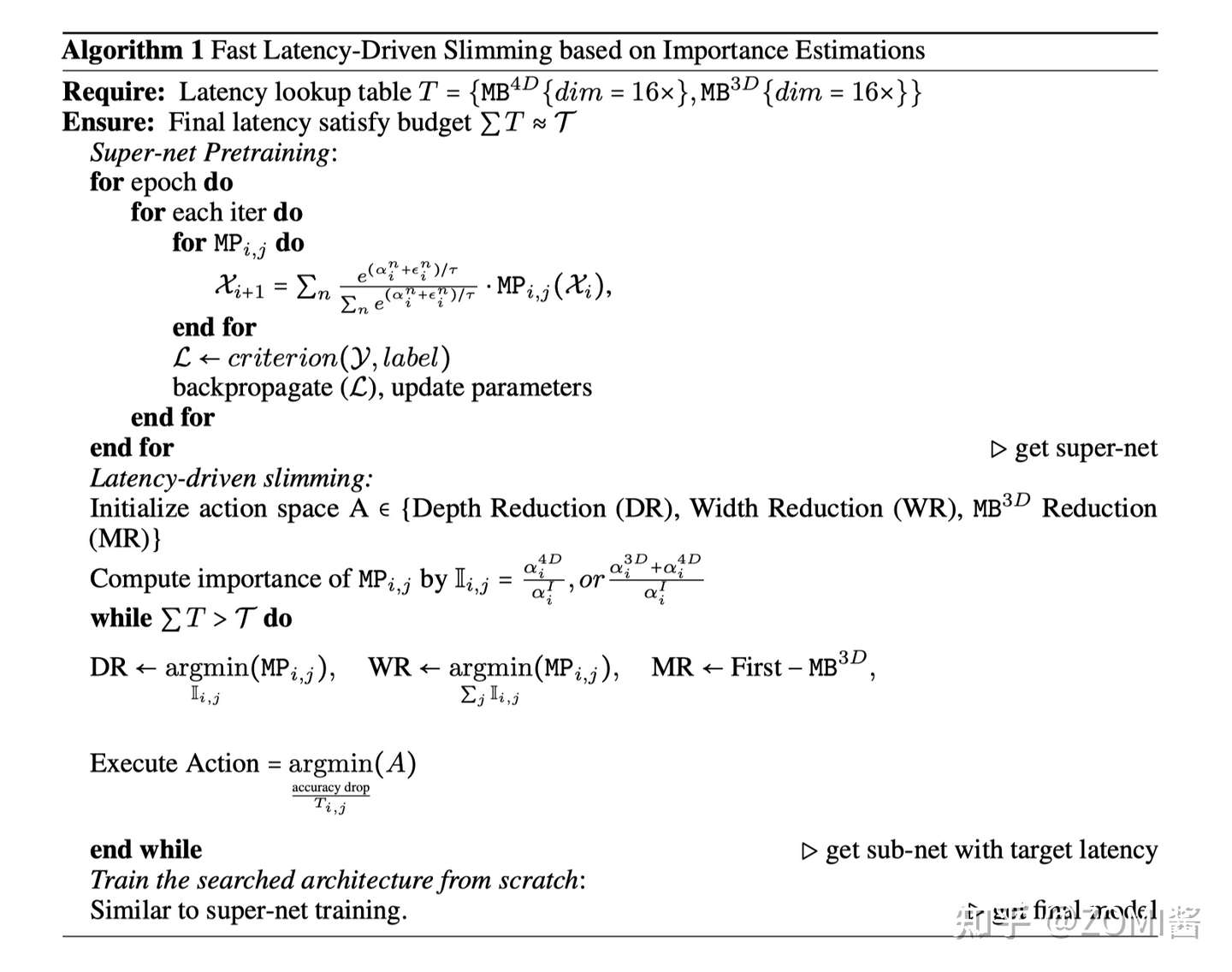
实时运行模型瘦身 Latency Driven Slimming
基于 dimension-consistent,EfficientFormer 构建了一个 Supernet,用于搜索 EfficientFormer 架构的高效模型。下面定义一个 MetaPath (MP):
I 呢表示 identity path,j 表示第 j 个阶段,i 表示第 i 个块。搜索网络Supernet 中通过用 MP 代替 EfficientFormer 的 MB。
在 Supernet 的第1阶段和第2阶段中,每个 Block 可以选择 MB4D 或 I,而在第3阶段和第4阶段中,Block可以是 MB3D、MB4D 或 I。
EfficientFormer 只在最后两个阶段启用 MB3D,原因有2个:1)多头注意力的计算相对于Token长度呈二次增长,因此在模型早期集成会大大增加计算成本。2)将全局多头注意力应用于最后阶段符合直觉,即网络的早期阶段捕获低级特征,而后期层则学习长期依赖关系。
- 搜索空间
搜索空间包括 C_j(每个 Stage 的宽度)、N_j(每个 Stage 中的块数,即深度)和最后 N 个 MB3D 的块。
- 搜索算法
传统的硬件感知网络搜索方法,通常依赖于每个候选模型在搜索空间中的硬件部署来获得延迟,这是非常耗时的。EfficientFormer提出了基于梯度的搜索算法,以获得只需要训练一次Supernet的候选网络。
(后续可以针对 NASA 搜索进行详细补充这个内容。)
实验结果
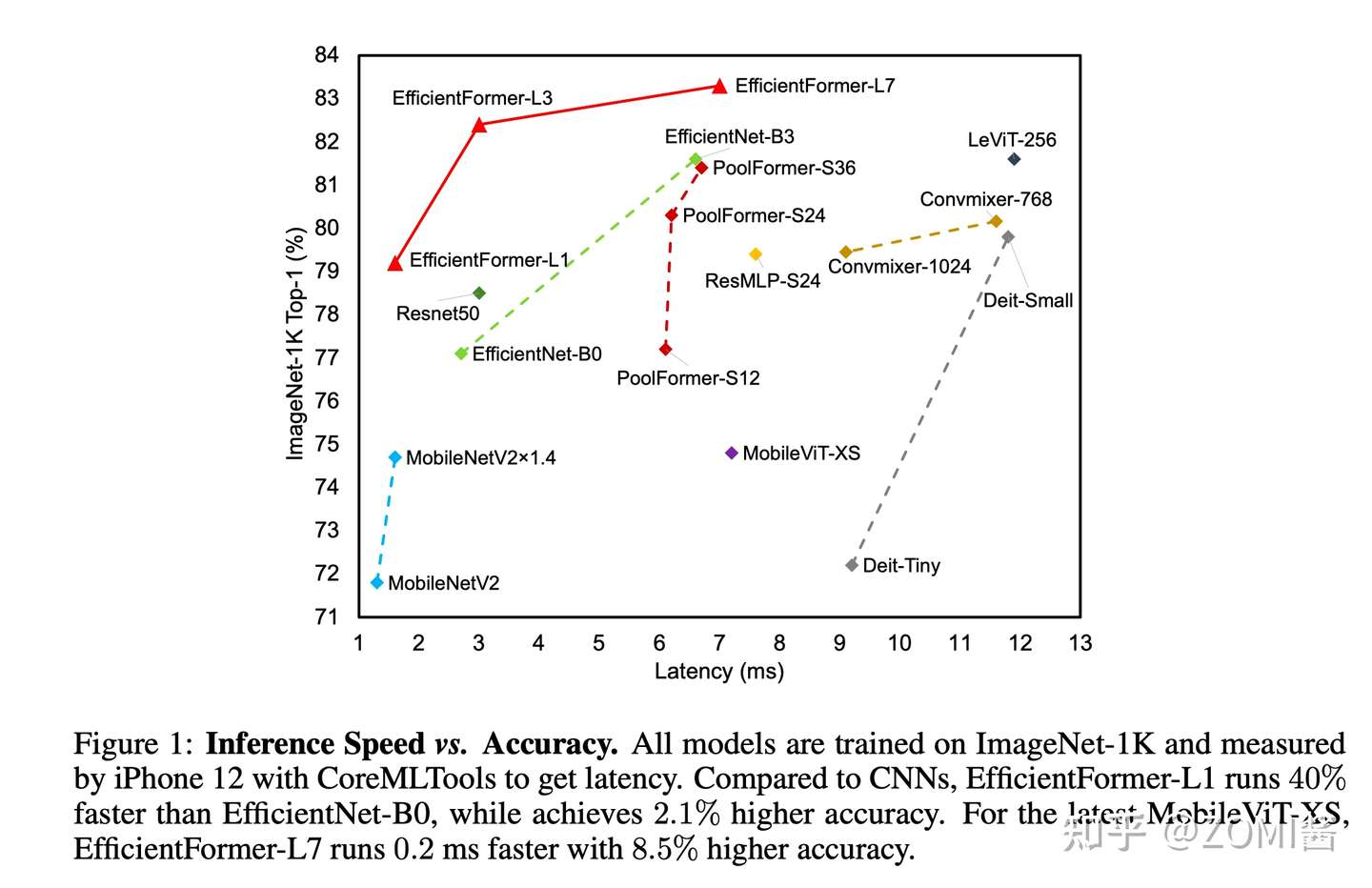
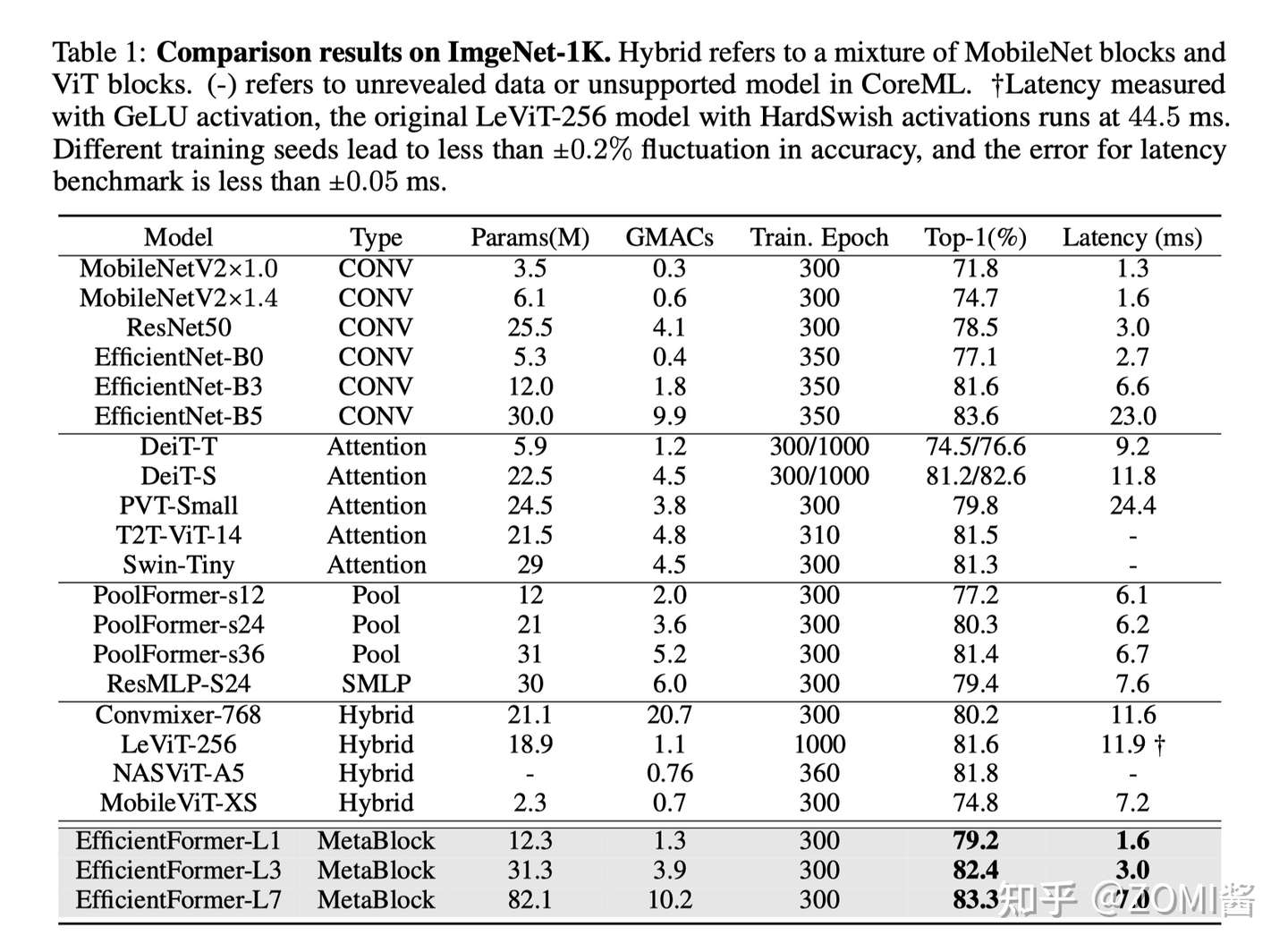
总的来说呢,EfficientFormer-L1 在 ImageNet-1K 分类任务上实现了 79.2% 的 top-1 准确率,推理时间仅为 1.6 ms,与 MobileNetV2 相比,延迟降低了 6%,top-1 准确率提高了 7.4%。延迟不是 ViT 在端侧部署的障碍。
另外,EfficientFormer-L7 实现了 83.3% 的准确率,延迟仅为 7.0 ms,大大优于 ViT×MobileNet 混合设计(MobileViT-XS,74.8%,7.2ms)。

最后通过使用 EfficientFormer 作为图像检测和分割基准的 Backbone,性能也是非常赞的。ViTs 确实可以实现超快的推理速度和强大的性能。
小结
MobileViT 结构上基本基于 MobileNet V2 而改进增加了 MobileViT block,但是同样能够实现一个不错的精度表现,文章实验部分大量的对比了 MobileViT 跟 CNN 和 ViT 模型的参数量和模型大小,不过值得一提的是在端侧除了模型大小以外,更加重视模型的性能,只能说这篇文章经典之处是开创了 CNN 融合 ViT 在端侧的研究。
引用
[1] Li, Yanyu, et al. "EfficientFormer: Vision Transformers at MobileNet Speed." arXiv preprint arXiv:2206.01191 (2022).
[2] EfficientFormer | 苹果手机实时推理的Transformer模型,登顶轻量化Backbone之巅

 浙公网安备 33010602011771号
浙公网安备 33010602011771号