GAMES101-03- Transformation变换
Transformation变换
Why study transformation
Modeling模型变换
Viewing视图变换
包括从3D转换为2D。
2D transformation : rotation,scale,shear
Representing transformation using matrix
Scale Matrix

横轴纵轴都缩放0.5倍,用式子表示为

用矩阵表示则如下(\(s=0.5\))

假设是不均匀的缩放,如下

那么矩阵形式可表示如下(\(s_x=0.5,s_y=1.0\)):

Reflection Matrix

Shear Matrix切变

怎么找出它们的矩阵形式?
答:观察水平x和垂直y上对应的变化,再考虑用矩阵来表示。
Rotate(关于原点,默认逆时针)

手推公式过程:
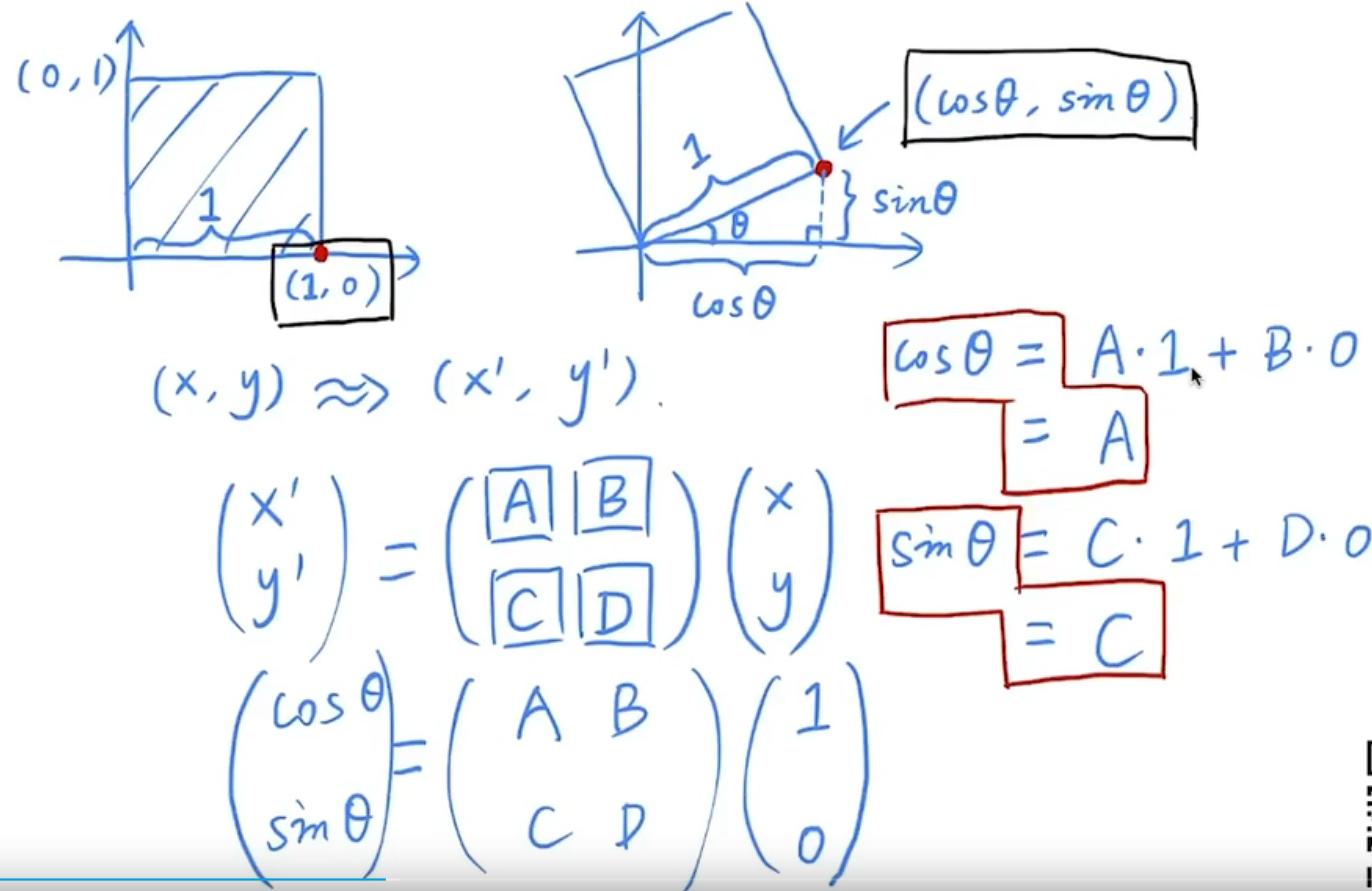
同理,可以用特殊点(0,1)推出B点和D点。
总结:
可以发现线性变换都可以写成矩阵形式如下,即矩阵乘以某输入向量等于对应输出向量。

Transiation平移

根据上图,可以发现此时式子不能再单纯地用矩阵乘以输入向量的形式了,而应该用以下形式表示:

把上图这种类似的变换,可以称为仿射变换
平移操作属于线性变换吗?
答:平移操作不属于线性变换。
Homogeneous coordinates齐次坐标
但我们不希望把平移当作一种特殊情况处理。所以思考有没有统一的方式来表示所有的变换形式呢?
答:引入齐次坐标的概念。

2维向量的第三行为什么设为0?
答:因为向量具有方向不变性,平移不变性。将向量的第三行设为0,一方面是为了保护二维向量的平移不变性,另一 方面还能保证以下操作的正确性。

需要注意的是,在齐次方程中,有个重要的概念如下:

从上面这个概念讨论,point+point等于什么呢?
答:point+point本身是没有意义的。但是从上面这个概念讨论的话,point+point等于这两个点的中点。(因为此时w为2,想要w为1点就要除以2)
将向量设为上述形式,那么此时平移变换可以表示成如下形式:

此时齐次变换就能够统一实现所有的变换形式,而所有的仿射变换都可以写成这样齐次坐标的形式。

举例说明如下:

那么引入齐次方程的代价是什么呢?
答:代价就是引入了一个额外的数字,任何一个点(x,y)都写成了(x,y,1),任何一个向量(x,y)都写成了(x,y,0)。而对矩阵来说,原本是2x2,现在是3x3的形式(只是最后一行,一般是0,0,1(表示仿射变换的时候),代价算是比较小的)。
其他变换
Inverse Transform逆变换

Composing transforms
考虑以下变换形式:

可能变换的过程如下:先旋转再平移。

而先平移再旋转,得不出目标形式:

由上面的变换过程可以得出什么?
答:一是可以得出复杂的变换过程可以由多个简单的变换实现;二是可以得出变换的顺序是很重要的(这点也可以用矩阵不可以用交换律的思维来考虑)。
用矩阵表示上述组合变换如下:

将上述这个组合变换进行推广,可以得到如下形式(利用了矩阵的结合律):

矩阵乘积的性质使得用一个\(A\)来表示多个矩阵\(A_i\)相乘,把复杂化为简单。
举例如下,下图中向量(x,y,1)先线性变换(旋转),再平移处理。等号右侧的式子中前两个矩阵是可以写在一起的。

Decomposing Complex Transform分解复杂变换
举例,考虑旋转不绕着原点,而是绕着点c。
那么此时就可以考虑分解。

3D transformations
三维的变换都可以用二维的变换来类比,那么三维也引入齐次坐标,那么其表示形式可以写为:

同理,对点的定义操作如下:

当然,写\((x/w,y/w,z/w,1)\)也是对的,这样就是用四个数来表示三维空间的点。
那么三维空间也可以用4x4的矩阵来表示(仿射变换的情况下,矩阵的最后一行就是0,0,0,1):

思考,在上式写成4x4矩阵形式的时候,是先考虑线性变换呢,还是先考虑平移呢?
答:同二维空间一样,如下式子可以看出是先线性变换再平移的。所以在三维空间也是一样的,先线性变换再平移。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号