


GAMES101
Introduction
the definition of CG
- computer graphics: the use of computer to synthesize and manipulate visual information
the application of CG
- video games
- movies
- animations
- design
- virtual reality
- illustration
- simulation
- GUI (Graphical User Interface)
- Typography(字体设计)
Why study computer graphics
- technical challenges
- math of (perspective) projections, curves, surfaces
- physics of lighting and shading
- representing/operating shapes in 3D
- animation/simulation
3D graphics software programming and hardware
- CG is AWESOME
Course Topics
- Rasterization
- Project geommetry primitives (3D triangles/polygons) onto the screen
- break projected primitives into fragments(pixels)
- gold standard in video games (real-time applications)
- Curves and Meshes
- How to represent geometry in computer graphics
- Ray Tracing
- shoot rays from the camera though each pixel
- calculate intersection and shading
- continue to bounce the rays till they hit light sources
- gold standard in animation/movies (offline applications)
- shoot rays from the camera though each pixel
- Animation/Simulation
- Key frame animation
- mass-spring system
- NOT about:
- using OpenGL/DirectX/Vulkan
- 3D modeling using Maya/3DS MAX/Belnder, or VR/game development using Unity/Unreal Engine
- computer vision/deep learing topics
- differences:
- model \(\rightarrow\) image: CG (rendering)
- model \(\rightarrow\) model: CG(modeling, simulation)
- image \(\rightarrow\) image: CV(image processing)(not Computer Photography)
- image \(\rightarrow\) model: CV
Course Logistic
- comprehensive but without hardware programming
- pace/contents subjecft to change
- use IDE
- textbook: tiger book
Basis
- CG dependencies:
- mathematics: Algebra, calculus, statistics
- physics: optics, mechanics
- misc:
- signal processing
- numerical analysis
- a bit of aesthetics
Linear Algebra
- vector: \(\vec a=(a_i)_n^T\) (column vector default)
- vector addition
- cartesian coordinate
- dot(scalar) product
- usage: same/opposite/vertical direction, length of vector
- cross product
- the judgement of right-handed system(RHS): \(\hat i \times \hat j=\hat k\)
- usage: inside/outside, left/right
- orthonormal coordinate frames:
- \(\hat i \cdot \hat j=\hat j \cdot \hat k=\hat k \cdot \hat i=0\)
- \(\hat i \times \hat j=\hat k\)
- \(\vec p=(\vec p \cdot \hat i)\hat i+(\vec p \cdot \hat j)\hat j+(\vec p \cdot \hat k)\hat k\)
- matrix
- matrix-matrix multiplication
- associative and distributive
- matrix-vector multiplication
- transpose
- vector multiplication in matrix form
- dot product: \(\vec a \cdot \vec b=\vec a^T\vec b\)
- cross product: \(\vec a \times \vec b=A^*\vec b\)
- dual matrix: $$A^*=\left\lgroup\begin{matrix}
0 & -z_a & y_a \
z_a & 0 & -x_a \
-y_a & x_a & 0 \
\end{matrix}\right\rgroup$$
- dual matrix: $$A^*=\left\lgroup\begin{matrix}
- matrix-matrix multiplication
transformation
- why study transformation:
- modeling: translation, rotation, scaling
- viewing: (3D to 2D) projection
- categories of transformation:
- Linear transformation: \(\vec x'=M\vec x\)
- affine transform \(=\) linear transform \(+\) translation
- inverse transform: \(M^{-1}\)
- Homogenous Coordinates:
- 2D point: \((x,y,1)^T\)
- \((x,y,a)^T=(\frac xa,\frac ya,1)^T\)
- 2D vector: \((x,y,0)^T\)
- why diff for point and vector:
- vector \(+\) vector \(=\) vector
- point \(-\) point \(=\) vector
- point \(+\) vector \(=\) point
- point \(+\) point \(=\) mid-point
- 2D point: \((x,y,1)^T\)
- 2D transformations:
- scale: \(S(s_x,s_y)=\left\lgroup\begin{matrix}
s_x & 0 & 0\\
0 & s_y & 0\\
0 & 0 & 1\\
\end{matrix}\right\rgroup\)
- reflection: \(R_x=\left\lgroup\begin{matrix}
-1 & 0 & 0\\
0 & 1 & 0\\
0 & 0 & 1\\
\end{matrix}\right\rgroup,R_y=\left\lgroup\begin{matrix}
1 & 0 & 0\\
0 & -1 & 0\\
0 & 0 & 1\\
\end{matrix}\right\rgroup\)
- shear: \(Sh(a)=\left\lgroup\begin{matrix}
1 & a & 0\\
0 & 1 & 0\\
0 & 0 & 1\\
\end{matrix}\right\rgroup\)
- rotate: \(R(\theta)=\left\lgroup\begin{matrix}
\cos\theta & -\sin\theta & 0\\
\sin\theta & \cos\theta & 0\\
0 & 0 & 1\\
\end{matrix}\right\rgroup\)
- translation: \(T(t_x,t_y)=\left\lgroup\begin{matrix}
1 & 0 & t_x\\
0 & 1 & t_y\\
0 & 0 & 1\\
\end{matrix}\right\rgroup\)
- scale: \(S(s_x,s_y)=\left\lgroup\begin{matrix}
s_x & 0 & 0\\
0 & s_y & 0\\
0 & 0 & 1\\
\end{matrix}\right\rgroup\)
- composite transform: the multiplication of matrixes
- formula representation: \(A_n(...A_2(A_1(\vec x)))=(A_n...A_2A_1)\vec x\)
- one step forward \(\Leftrightarrow\) left multiplication of matrix
- decomposing complex transformation: (take rotate around a given point c as example)
- translate center to origin
- rotate
- translate back
- 3D transformation: just add an axis based on 2D transformation (model transformation)
- special: rotation: \(R_x(\theta)=\left\lgroup\begin{matrix}
1 & 0 & 0 & 0\\
0 & \cos\theta & -\sin\theta & 0\\
o & \sin\theta & \cos\theta & 0\\
0 & 0 & 0 & 1\\
\end{matrix}\right\rgroup, R_y(\theta)=\left\lgroup\begin{matrix}
\cos\theta & 0 & \sin\theta & 0\\
0 & 1 & 0 & 0\\
-\sin\theta & 0 & \cos\theta & 0\\
0 & 0 & 0 & 1\\
\end{matrix}\right\rgroup,R_z(\theta)=\left\lgroup\begin{matrix}
\cos\theta & -\sin\theta & 0 & 0\\
\sin\theta & \cos\theta & 0 & 0\\
0 & 0 & 1 & 0\\
0 & 0 & 0 & 1\\
\end{matrix}\right\rgroup\)
- \(R_{xyz}(\alpha,\beta\gamma)=R_x(\alpha)R_y(\beta)R_z(\gamma)\)
- \(R(\hat n,\alpha)=\cos\alpha I+(1-\cos\alpha)\hat n\hat n^T+\sin\alpha N\)
- \(N=\left\lgroup\begin{matrix}0 & -n_z & n_y & 0\\n_z & 0 & -n_x & 0\\-n_y & n_x & 0 & 0\\0 & 0 & 0 & 1\\\end{matrix}\right\rgroup\)
- special: rotation: \(R_x(\theta)=\left\lgroup\begin{matrix}
1 & 0 & 0 & 0\\
0 & \cos\theta & -\sin\theta & 0\\
o & \sin\theta & \cos\theta & 0\\
0 & 0 & 0 & 1\\
\end{matrix}\right\rgroup, R_y(\theta)=\left\lgroup\begin{matrix}
\cos\theta & 0 & \sin\theta & 0\\
0 & 1 & 0 & 0\\
-\sin\theta & 0 & \cos\theta & 0\\
0 & 0 & 0 & 1\\
\end{matrix}\right\rgroup,R_z(\theta)=\left\lgroup\begin{matrix}
\cos\theta & -\sin\theta & 0 & 0\\
\sin\theta & \cos\theta & 0 & 0\\
0 & 0 & 1 & 0\\
0 & 0 & 0 & 1\\
\end{matrix}\right\rgroup\)
- viewing transformation:
- steps:
- find a good place and arrange people (model transformation)
- find a good "angle" to put the camera (view transformation)
- cheese! (projection transformation)
- view/camera transformation
- basic defs:
- position: \(\vec e\)
- look-at/gaze direction: \(\hat g\)
- up direction: \(\hat t\)
- key observation: If the camera and all objects move together, the photo will be the same \(\Rightarrow\) put camera at \((0,0)\) (the thing view transformation do)
- steps:
- translate \(\vec e\) to origin
- rotate \(\hat g\) to \(-\hat k\)
- rotate \(\hat t\) to \(\hat j\)
- rotate \(\hat g \times \hat t\) to \(\hat i\)
- representation: \(M_{view}=R_{view}T_{view}\)
- \(T_{view}=\left\lgroup\begin{matrix}
1 & 0 & 0 & -x_e\\
0 & 1 & 0 & -y_e\\
0 & 0 & 1 & -z_e\\
0 & 0 & 0 & 1\\
\end{matrix}\right\rgroup\)
- \(R^{-1}_{view}=\left\lgroup\begin{matrix}
x_{\hat g \times \hat t} & x_t & x_{-g} & 0\\
y_{\hat g \times \hat t} & y_t & y_{-g} & 0\\
z_{\hat g \times \hat t} & z_t & z_{-g} & 0\\
0 & 0 & 0 & 1\\
\end{matrix}\right\rgroup \Rightarrow R_{view}=\left\lgroup\begin{matrix}
x_{\hat g \times \hat t} & y_{\hat g \times \hat t} & z_{\hat g \times \hat t} & 0\\
x_t & y_t & z_t & 0\\
x_{-g} & y_{-g} & z_{-g} & 0\\
0 & 0 & 0 & 1\\
\end{matrix}\right\rgroup\)
- \(T_{view}=\left\lgroup\begin{matrix}
1 & 0 & 0 & -x_e\\
0 & 1 & 0 & -y_e\\
0 & 0 & 1 & -z_e\\
0 & 0 & 0 & 1\\
\end{matrix}\right\rgroup\)
- basic defs:
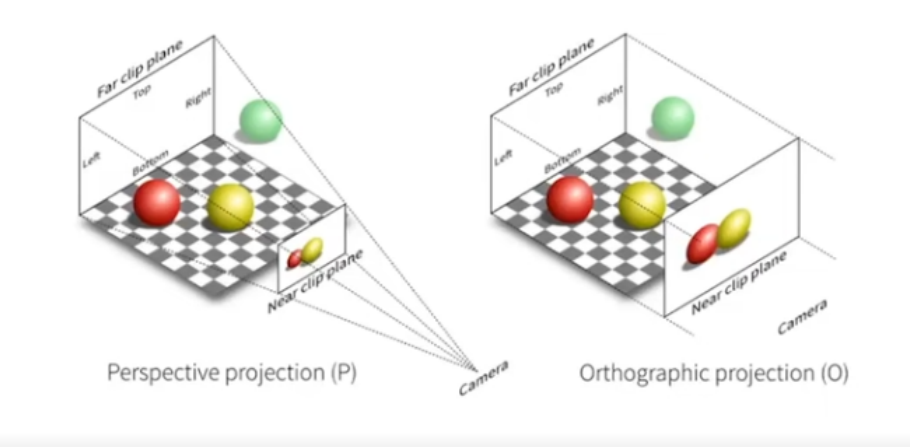
- projection transformation
- orthographic projection
- basic defs:
- cuboid: \([l,r] \times [b,t] \times [f,n]\)
- "canonical" cube: \([-1,1]^3\)
- a way to get orthographic projection:
- camera located at origin, looking at -z, up at y
- drop z coordinate
- translate and scale the resulting rectangle to \([-1,1]^2\)
- general way to get orthographic projection:
- center cuboid by translating
- scale into "canonical" cube
- matrix representation: \(M_{ortho}=R_{ortho}T_{ortho}=\left\lgroup\begin{matrix} \frac 2{r-l} & 0 & 0 & 0\\ 0 & \frac 2{t-b} & 0 & 0\\ 0 & 0 & \frac 2{n-f} & 0\\ 0 & 0 & 0 & 1\\ \end{matrix}\right\rgroup\left\lgroup\begin{matrix} 1 & 0 & 0 & -\frac{r+l}2\\ 0 & 1 & 0 & -\frac{t+b}2\\ 0 & 0 & 1 & -\frac{n+f}2\\ 0 & 0 & 0 & 1\\ \end{matrix}\right\rgroup\)
- caveat: looking at/along -z is making near and far not intutive(n>f) (that's why OpenGL uses left hand coords)
- basic defs:
- perspective projection (most common in computer graphics, art, visual system)
- feature:
- further objects are smaller
- parallel lines not parallel
- converge to single point
- way to do perspective projection:
- "squish" the frustum(台体) into a cuboid (\(M_{persp \rightarrow ortho}\))
- basic defs:
- \(f'=f,n'=n\)
- any point on the near plane won't change
- any point's z on the far plane won't change
- basic defs:
- do orthographic projection (\(M_{ortho}\))
- "squish" the frustum(台体) into a cuboid (\(M_{persp \rightarrow ortho}\))
- way to get \(M_{persp \rightarrow ortho}\):
- principle: \(\begin{cases}x'=\frac nzx \\ y'=nzy\end{cases}y'=\frac nzy\)
- matrix representation: \(M_{persp \rightarrow ortho}\left\lgroup\begin{matrix}x \\ y \\ z \\ 1\end{matrix}\right\rgroup=\left\lgroup\begin{matrix}nx \\ ny \\ C \\ n\end{matrix}\right\rgroup \Rightarrow M_{persp \rightarrow ortho}=\left\lgroup\begin{matrix} n & 0 & 0 & 0\\ 0 & n & 0 & 0\\ 0 & 0 & A & B\\ 0 & 0 & 1 & 0\\ \end{matrix}\right\rgroup\)
- get \(A\) & \(B\):
- any point on the near plane won't change: \(M_{persp \rightarrow ortho}\left\lgroup\begin{matrix}x \\ y \\ n \\ 1\end{matrix}\right\rgroup=\left\lgroup\begin{matrix}x \\ y \\ n \\ 1\end{matrix}\right\rgroup=\left\lgroup\begin{matrix}nx \\ ny \\ n^2 \\ n\end{matrix}\right\rgroup \Rightarrow \left\lgroup\begin{matrix}0 & 0 & A & B\end{matrix}\right\rgroup\left\lgroup\begin{matrix}x \\ y \\ n \\ 1\end{matrix}\right\rgroup=n^2 \Rightarrow An+B=n^2\)
- any point's z on the far plane won't change: \(M_{persp \rightarrow ortho}\left\lgroup\begin{matrix}0 \\ 0 \\ f \\ 1\end{matrix}\right\rgroup=\left\lgroup\begin{matrix}0 \\ 0 \\ f \\ 1\end{matrix}\right\rgroup=\left\lgroup\begin{matrix}0 \\ 0 \\ f^2 \\ n\end{matrix}\right\rgroup \Rightarrow \left\lgroup\begin{matrix}0 & 0 & A & B\end{matrix}\right\rgroup\left\lgroup\begin{matrix}0 \\ 0 \\ f \\ 1\end{matrix}\right\rgroup=f^2 \Rightarrow Af+B=f^2\)
- any point on the near plane won't change: \(M_{persp \rightarrow ortho}\left\lgroup\begin{matrix}x \\ y \\ n \\ 1\end{matrix}\right\rgroup=\left\lgroup\begin{matrix}x \\ y \\ n \\ 1\end{matrix}\right\rgroup=\left\lgroup\begin{matrix}nx \\ ny \\ n^2 \\ n\end{matrix}\right\rgroup \Rightarrow \left\lgroup\begin{matrix}0 & 0 & A & B\end{matrix}\right\rgroup\left\lgroup\begin{matrix}x \\ y \\ n \\ 1\end{matrix}\right\rgroup=n^2 \Rightarrow An+B=n^2\)
- answer: \(\begin{cases}An+B=n^2 \\ Af+B=f^2\end{cases} \Rightarrow \begin{cases}A=n+f \\ B=-nf\end{cases}\)
- result: \(M_{persp \rightarrow ortho}=\left\lgroup\begin{matrix} n & 0 & 0 & 0\\ 0 & n & 0 & 0\\ 0 & 0 & n+f & -nf\\ 0 & 0 & 1 & 0\\ \end{matrix}\right\rgroup\)
- way to define the plane:
- \(\rm aspect\ ratio={width \over height}\)
- vertical field of view (fovY)
- represent other values with them:
- \(\tan\frac{fovY}2=\frac t{|n|}\)
- \(aspect=\frac rt\)
- feature:
- differentiate:
![]()
- orthographic projection
- canonical cube to screen
-
some defs:
- screen: an array of pixels
- resoltion: size of the array
- a typical kind of raster display
- pixel: a little square with uniform color (for now)
- color: a mixture of (red,green,blue)
- screen space def:
- pixels' indices: in the form of \((x,y)\)
- pixels' indices from \((0,0)\) to \((w-1,h-1)\)
- pixel \((x,y)\) centered at \((x+0.5,y+0.5)\)
- screen covers range \((0,0)\) to \((w,h)\)
- screen: an array of pixels
-
effect: \([-1,1]^2\) to \([0,w] \times [0,h]\)
-
matrix: \(M_{viewport}=\left\lgroup\begin{matrix}\frac w2 & 0 & 0 & \frac w2\\0 & \frac h2 & 0 & \frac h2\\0 & 0 & 1 & 0\\0 & 0 & 0 & 1\end{matrix}\right\rgroup\)
-
- steps:
Rasterization & Shading
Rasterization
- Rasterization Displays
- Oscilloscope(示波器)
- CRT(阴极射线管)
- 隔行扫描(一个时刻扫描奇数行,下一秒扫描偶数行,如此循环)
- 问题:出现严重撕裂(特别是高速移动的物体)
- 隔行扫描(一个时刻扫描奇数行,下一秒扫描偶数行,如此循环)
- Frame Buffer (memory for a raster display)
- Flat Panel Displays
- LCD Display (Liquid Crystal Display)
- principle: block or transmit light by twisting polarization (Intermediate intensity levels by partial twist)
- LED(Light emitting diode) Array Display
- Electrophoretic(Electronic Ink) Display
- pros: natural
- cons: slow to fresh the page
- LCD Display (Liquid Crystal Display)
- Fundamental Shape Primitives
- Why:
- Most basic polygon (break up other polygons)
- unique properties:
- guaranteed to be planar
- well-defined interior
- well-defined method for interpolating values at vertices over triangle (barycentric interpolation)
- a simple approach: sampling
- sampling: evaluating a function at a point (discretize a function)
- sampling is a core idea in graphics
- implementation:
- basic function: \(inside(tri,x,y)\) (test if \((x,y)\) in \(tri\))
- implementation: (with \(P_0,P_1,P_2\) the vertice of \(tri,Q(x,y)\))
- \(\overrightarrow{P_0Q} \times \overrightarrow{P_0P_1}>0\)
- \(\overrightarrow{P_1Q} \times \overrightarrow{P_1P_2}>0\)
- \(\overrightarrow{P_2Q} \times \overrightarrow{P_2P_0}>0\)
- implementation: (with \(P_0,P_1,P_2\) the vertice of \(tri,Q(x,y)\))
- code:
for x in range(xmax): for y in range(ymax): image[x][y]=inside(tri,x+0.5,y+0.5)
- basic function: \(inside(tri,x,y)\) (test if \((x,y)\) in \(tri\))
- optimization: (not scanning all points in )
- bounding-box: the box containing the target triangle
- axis-aligned bounding-box: the bounding-box with \([minx,maxx] \times [miny,maxy]\)
- incremental triangle traversal (faster for thin and rotated triangles) (scanning each line one by one)
- sampling: evaluating a function at a point (discretize a function)
- Why:
- rasterization in real display:
- real LCD screen pixels: different from the pre-def (not one pixel a color, but some blocks of RGB)
- some have more green light: eye of person is more sensitive to green light
- color print
- real LCD screen pixels: different from the pre-def (not one pixel a color, but some blocks of RGB)
- anti-aliasing:
- aliasing: jaggies (a problem need to solve)
- sampling theory
- sampling is ubiquitous in CG
- rasterization
- photograph (sample image on sensor plane)
- video: sample time
- sampling artifacts:
- jaggies (sampling in space)
- Moire Pattern (undersampling images)
- Wagon wheel effect (sampling in time)
- reason behind aliasing artifacts: signals are changing too fast(high frequency), but sampled too slowly
- sampling is ubiquitous in CG
- antialiasing idea: bluring(pre-filtering) before sampling
- diff: blurred aliasing (blurring after sampling) (not the thing we need)
- principle behind the idea:
- frequency domain:
- sines and cosines
- frequencies: \(\cos 2\pi fx\)
- Fourier representation: represent a function as a weighted sum of sines and cosines
- Fourier Transform: spatial domain \(\rightarrow\) frequency domain
- equation: \(F(\omega)=\int_{-\infty}^{+\infty}f(x)e^{-2\pi i\omega x}{\rm d}x\)
- inverse transform: \(f(x)=\int_{-\infty}^{+\infty}F(\omega)e^{-2\pi i\omega x}{\rm d}\omega\)
- basis: \(e^{ix}=\cos x+i\sin x\)
- images after Fourier Transform:
- frequency:
- center: lowest
- border: highest
- the amount of data: lightness
(most image have much low-frequency data and little high-frequency data) - meaning of data in different frequency:
- low-frequency data: content
- high-frequency data: edges
- frequency:
- why has aliasing:
- higher frequencies need faster sampling
- undersampling creates frequency aliases
- def of aliases: two frequencies that are indistinguishable at a given sampling rate
- filtering: getting rid of certain frequency contents
- Filter out low frequencies in image: edges
- Filter out high frequencies in image: blur
- Filter out low and high frequencies in image: blurred edges
- another understanding of filtering: convolution(averaging)
- convolution: convolution over vector and vector
- convolution theorem: convoltion in the spatial domain is equal to multiplication in the frequency domain
- why averaging: the effect of it is like blurring/averaging
- box filter: \(\frac 19\left\lgroup\begin{matrix}1 & 1 & 1\\1 & 1 & 1\\1 & 1 & 1\end{matrix}\right\rgroup\)
- wider filter kernel=lower frequencies
- narrower filter kernel=higher frequencies
- redef based on frequency:
- sampling: repeating frequency contents
- impacting function: \(f(x)=[x=ak+b],k \in \mathbb Z\)
- impacting function on spatial domain equal to another impacting function on spatial domain
- impacting function: \(f(x)=[x=ak+b],k \in \mathbb Z\)
- aliasing: mixed frequency contents
- sampling with low frequency \(\Rightarrow\) the frequency content overlapped \(\Rightarrow\) frequency changed \(\Rightarrow\) aliasing
- sampling: repeating frequency contents
- frequency domain:
- how to reduce aliasing error :
- increase sampling rate
- essentailly increasing the distance between replicas in the Fourier domain
- higher resolution displays, sensors, framebuffers
- but: costly & may need very high resolution
- antialiasing: limiting then repeating
- principle: making Fourier contents "narrower" before repeating
- i.e. Filtering out high frequencies before sampling
- antialiasing by computing average pixel value
- convolve \(f(x,y)\) by a 1-pixel box-blur
- then sample at every pixel's center
- antialiasing by supersampling(MSAA) (a approximate of antialiasing)
- supersampling: sampling multiple locations within a pixel and averaging their values
- \(inside(tri,x,y)\): calc if each subpixel inside the \(tri\)
- the value of a pixel: the average of sampling result in the pixel
- cost of MSAA: the increment in time cost
- other antialiasing methods:
- FXAA(Fast Approximate AA)
- TAA(Temporal AA)
- principle: making Fourier contents "narrower" before repeating
- increase sampling rate
- topic related: super resolution/super sampling
- from low resolution to high resolution
- essentially still "not enough samples" problem
- DLSS (Deep Learning Super Sampling)
- Z-buffering:
- inspiration: painter's algorithm (paint from back to front, overwrite in the framebuffer)
- problem:
- requires sorting in depth (\(O(n\log n)\) for n triangles)
- can have unresolvable depth order
- problem:
- idea:
- store current min z-value for each sample(pixel)
- needs an additional buffer for depth values
- frame buffer stores color values
- depth buffer(z-buffer) stores depth
- IMPORTANT: For simplicity, we suppose z is always positive (smaller z \(\Rightarrow\) closer, larger z \(\Rightarrow\) further)
- algorithm:
init(zbuffer,INF) for tri in tris: for P in tri: if P.z<zbuffer[P.x,P.y]: framebuffer[x,y]=P.rgba zbuffer[x,y]=P.z - complexity: \(O(n)\) for \(n\) triangles (assuming constant coverage) (don't matter if draw triangles in different orders)
- most important visibility algorithm (implemented in hardware for all GPUs)
- inspiration: painter's algorithm (paint from back to front, overwrite in the framebuffer)
Shading
- question: what's the color of each triangle
- definition: the darkening or coloring of an illustration or diagram with parallel lines pr a block of color
- in this course: the process of applying a material to an object
- a simple shading model: Blinn-Phong Reflectance Model
- different parts of shading:
- specular highlights(高光)
- diffuse reflections(漫反射)
- ambient lighting(全局光照/间接光照)
- some defs:
- shading point: the point is being shaded
- \(\hat v\): viewer direction
- \(\hat n\): surface normal
- \(\hat l\): light direction
- surface parameters: color, shininess
- light falloff (the energy on ball shell with \(r\)): \(I_r=\frac I{r^2}\)
- the energy on each ball shell is the same
- Assume intensity on the ball shell whose \(r=1\)
- tips:
- shading is local (no shadows will be generated) (shading \(\neq\) shadow)
- diffuse reflection: light is scattered uniformly in all directions (surface color is the same for all viewing directions)
- question: how much light(energy) is received?
- Lambert's cosine law: light per unit area is proportional to \(\cos\theta=\hat l \cdot \hat n\)
- representation: \(L_d=k_d(\frac I{r^2})\max(0,\langle\hat n,\hat l\rangle)\)
- \(L_d\): diffusely reflected light
- \(k_d\): diffuse coefficient(color) (bigger \(k_d \Rightarrow\) more white)
- \(\frac I{r^2}\): energy arrived at the shading point
- \(\max(0,\hat n \cdot \hat l)\): energy received by the shading point
- question: how much light(energy) is received?
- specular term: intensity depends on view direction (bright near mirror reflection direction)
- \(\hat v\) close to mirror \(\hat l \Leftrightarrow\) half vector near \(\hat n\)
- half vector: \(\hat h=bisector(\hat v,\hat l)={\hat v+\hat l \over \parallel\hat v+\hat l\parallel}\)
- why half vector: half vector is easier to calculate than the mirror \(\hat l\)
- way to measure "near": dot product
- module: \(L_s=k_s(\frac I{r^2})\max(0,\cos\alpha)^p=k_s(\frac I{r^2})\max(0,\hat n \cdot \hat h)^p\)
- \(L_s\): specularly reflected light
- \(k_s\): specular coeeficient
- \(p\): cosine power plots
- feature: increasing \(p\) narrows the reflection lobe
- usually used \(p\): 100-200
- \(\hat v\) close to mirror \(\hat l \Leftrightarrow\) half vector near \(\hat n\)
- ambient term: shading that does not depend on anything (add constant color to account for disregarded illumination and fill in black shadows)
- tip: this is approximate/fake
- model: \(L_a=k_aI_a\)
- \(L_a\): reflected ambient light
- \(k_a\): ambient coefficient
- whole model: \(L=L_a+L_d+L_s=k_aI_a+k_d(\frac I{r^2})\max(0,\hat n \cdot \hat l)+k_s(\frac I{r^2})\max(0,\hat n \cdot \hat h)^p\)
- different parts of shading:
- shading frequencies: the size of shading unit (point/mesh)
- shade each triangle: flat shading (triangle face is flat/has one normal vector) (not good for smooth surface)
- shade each vertex: gouraud shading (interpolate colors from vertices across triangle) (each vertex has a normal vector)
- per-vertex normal vectors:
- best method: from underlying geometry
- otherwise: infer vertex normals from triangle faces
- simple scheme: weighted average surrounding face normals (\(N_v={\sum_i w_iN_i \over \parallel\sum_i w_iN_i\parallel}\))
- per-vertex normal vectors:
- shade each pixel: Phong shading (interpolate normal vectors across each triangle) (compute full shading model at each pixel) (not the Binn-Phong Reflectance Model)
- per-pixel normal vectors: Barycentric interpolation of vertex normals (don't forget to normalize the interpolater directions)
- Graphic Pipeline:
- input (vectices in 3D space)
| vectex process - vertex stream (vertices positioned in screen space)
| triangle processinga - triangle stream (triangles positioned in screen space)
| rasterization - fragment stream (fragments) (one per covered sample)
| fragment processing - shaded fragments (shaded fragments)
| framebuffer operation - display (output: image(pixels))
- input (vectices in 3D space)
- shader: (programmable pipeline)
- program vertex and fragment processing stages
- describe operation on a single vertex (or fragment)
- some notations:
- shader function executes once per fragment
- outputs color of surface at the current fragment's screen sample position
- this shader performs a texture lookup to obtain the surface's material color at this point, then performs a diffuse lighting calculation
- goal: highly complex 3D sceness in realtime
- 100's of thousands to millions of triabgles in a scene
- complex vertex and fragment shader computations
- high resolution (2-4 megapixel+supersampling)
- 30-60 frames per second (even higher for VR)
- Graphic pipeline implementation: GPUs
- specialized processors for excuting graphics pipeline computations
- Discrete GPU Card/Integrated GPU
- Texture mapping:
- texture: used to define the properties of each point
- surfaces are 2D
- surface lives in 3D world space
- every 3D surface point also has a place where it goes in the 2D image (texture)
- way to create texture:
- man-made
- parameterization
- texture coordinate: each triangle is assigned a texture coordinate \((u,v)\) (usually \(u,v \in [0,1]\))
- could have the same texture coordinate for different point
- how to make it natural when duplicating and concating the texture: texture tiling (Wang tiling)
- Barycentrix coordinates:
- why neeed BC: interpolation across interpolate
- why interpolate:
- specify values at vertices
- obtain smoothly varying values across triangle
- what want to interpolate
- texture cooedinates, colors, normal vectors, ...
- why interpolate:
- def: \((\alpha,\beta,\gamma)\)
- \((x,y)=\alpha A+\beta B+\gamma C\)
- \(\alpha+\beta+\gamma\)
- calc: \(\begin{cases}\alpha={S_A \over S_A+S_B+S_C}\\\beta={S_B \over S_A+S_B+S_C}\\\gamma={S_A \over S_A+S_B+S_C}\end{cases}\)
- some special points:
- pois inside the triangle: \(\alpha>0,\beta>0,\gamma>0\)
- center: \(\alpha=\beta\gamma=\frac 13\)
- interpolation: \(f(\vec P)=\alpha f(\vec P_0)+\beta f(\vec P_1)+\gamma f(\vec P_2)\)
- some tips: could change after porjection \(\Rightarrow\) interpolation in 3D need to interpolate before projection
- why neeed BC: interpolation across interpolate
- texture applying:
- simple algorithm:
for pixel in pixels: u,v=texture_coordinate[x,y] texcoloe=texture.sample(u,v) col[x,y]=texcolor - question:
- texture too small: insufficient texture resolution
- reason: texture coordinate is not integer/texel is too small (has no integer point in a texel)
- texel: a pixel on a texture
- solution: bilinear interpolation:
- Linear interpolation: \(lerp(x,v_0,v_1)=v_0+x(v_1-v_0)\)
- \(v_0,v_1\): the value on the vertice
- \(x\): the proportion of interpolation point over the two vertices
- bilinear interpolation: \(f(x,y)=lerp(t,lerp(s,u_{00},u_{10}),lerp(s,u_{01},u_{11}))\)
- \(u_{00},u_{01},u_{10},u_{11}\): the value of 4 vertices around the texel
- Linear interpolation: \(lerp(x,v_0,v_1)=v_0+x(v_1-v_0)\)
- reason: texture coordinate is not integer/texel is too small (has no integer point in a texel)
- texture too big: aliasing
- reason: texel is too big (the color change above one point is too fast)
- solution: range averange (range query)
- mipmap (fast, approximate, square)
- mip: a multitude in a small space
- other name: image pyramid
- principle: multiplication (倍增)
- space complexity: \(O(\frac 43n)\)
- how to calc mipmap level D: \(D=\log_2L,L=\max(\sqrt{({{\rm d}u \over {\rm d}x})^2+({{\rm d}v \over {\rm d}x})^2},\sqrt{({{\rm d}u \over {\rm d}y})^2+({{\rm d}v \over {\rm d}y})})\)
- if D is not integer: trilinear interpolation (linear interpolation above bilinear results on level \(\lfloor D\rfloor\) and \(\lfloor D\rfloor+1\))
- limitation: overblur in far places (could only calc square space)
- optimizations:
- anisotropic filtering(ripmap)
- algorithm: multiplication independently on different axis
- improvement: can look up axis-aligned rectangular zones
- space complexity: \(O(3n)\)
- limitation: diagonal footprints still a problem
- EWZ filtering:
- use multiple lookups
- weighted average
- mipmap hierarchy sill helps
- can handle irregular footprints
- anisotropic filtering(ripmap)
- mipmap (fast, approximate, square)
- texture too small: insufficient texture resolution
- simple algorithm:
- application:
- Environment Map(Utah teapot)(light mapping in the environment)
- used to render realistic lighting
- types:
- Spherical Environment Map
- problem: prone to distortion (top and bottom parts)
- Cube Map: A vector maps to cube point along that direction (the cube is textured with 6 square texture maps)
- pros: much less distortion
- cons: need dir to face computation (but quite fast)
- Spherical Environment Map
- Bump/normal mapping (affect shading by texture mapping)
- principle:
- perturb surface normal per pixel (for shading computer only)
- "Height shift" per texel defined by a texture
- how to perturb the normal
- in flatland:
- original surface normal \(\hat n(p)=(0,1)\)
- derivate at p \({\rm d}p=c*[h(p+1)-h(p)]\)
- perturbed normal is then \(\hat n'(p)=(-{\rm d}p,1)\)
- normalize \(\hat n'(p)\)
- in 3D:
- original surface normal \(\hat n(p)=(0,0,1)\)
- derivate at p
- \({{\rm d}p \over {\rm d}u}=c*[h(u+1)-h(u)]\)
- \({{\rm d}p \over {\rm d}v}=c*[h(v+1)-h(v)]\)
- perturbed normal is then \(\hat n'(p)=(-{{\rm d}p \over {\rm d}u},-{{\rm d}},1)\)
- normalize \(\hat n'(p)\)
- in flatland:
- principle:
- Displacement mapping (a more advanced approach)
- uses the same texture as in bumping mapping
- actually moves the vertices
- requirement: the triangles is small enough
- build triangle based on real-time requirements (applied in DirectX)
- 3D Procedural Noise+Solid Modeling
- Perlin noise
- Provide Precomputed Shading
- Environment Map(Utah teapot)(light mapping in the environment)
- texture: used to define the properties of each point
Geometry
Representation
- Example:
- cloth
- drops
- city
- Ways to represent geometry
- implicit: based on classifying points (points satisfy some specified relationship)
- methods:
- algebraic surface
- constructive solid geometry: combine implicit geometry via Boolean operation (Boolean expressions)
- level sets:
- why have: closed-form equations are hard to describe complex shapes
- alternative: store a grid of values approximating function
- surface is found where interpolated values equal zero
- provides much more explicit control over shape (like a texture)
- alternative: store a grid of values approximating function
- why have: closed-form equations are hard to describe complex shapes
- distance functions: blend surfaces together using distance functions
- distance function: giving minimum distance(could be signed distance) from anywhere to object
- fractals: exhibit self-similarity, detail at all scales
- "Language" for describing natural phenomena
- cons: hard to control shape (aliasing)
- pros: inside/outside tests is easy
- cons: sampling can be hard
- methods:
- explicit: all points are given directly or via parameter mapping \(f:\R^2 \rightarrow \R^3;(u,v) \mapsto (x,y,z)\)
- methods:
- point cloud
- polygon mesh
- subvision, NURBS
- pros: sampling can be hard
- cons: inside/outside tests is easy
- methods:
- implicit: based on classifying points (points satisfy some specified relationship)
- No Best Represnetation (Geometry is Hard!) (Best Representation depends on tasks)
更新中。。。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号