强化学习-学习笔记12 | Dueling Network
 这是价值学习高级技巧第三篇,前两篇主要是针对 TD 算法的改进,而Dueling Network 对 DQN 的结构进行改进,能够大幅度改进DQN的效果。
这是价值学习高级技巧第三篇,前两篇主要是针对 TD 算法的改进,而Dueling Network 对 DQN 的结构进行改进,能够大幅度改进DQN的效果。
这是价值学习高级技巧第三篇,前两篇主要是针对 TD 算法的改进,而Dueling Network 对 DQN 的结构进行改进,能够大幅度改进DQN的效果。
Dueling Network 的应用范围不限于 DQN,本文只介绍其在 DQN上的应用。
12. Dueling Network
12.1 优势函数
Advantage Function.
回顾一些基础概念:
折扣回报:
\(U_t = R_t + \gamma \cdot R_{t+1} + \gamma^2R+...\)
动作价值函数:
\(Q_\pi(s_t,a_t)=\mathbb{E}[U_t|S_t=s_t,A_t=a_t]\)
消去了未来的状态 和 动作,只依赖于当前动作和状态,以及策略函数 \(\pi\)。
状态价值函数:
\(V_\pi(s_t)=\mathbb{E}[Q_\pi(s_t,A)]\)
只跟策略函数 \(\pi\) 和当前状态 \(s_t\) 有关。
最优动作价值函数
\(Q^*(s,a)=\mathop{max}\limits_{\pi}Q_\pi(s,a)\)
只依赖于 s,a,不依赖策略函数。
最优状态价值函数
\(V^*(s)=\mathop{max}\limits_{a}V_\pi(S)\)
只依赖 S。
下面就是这次的主角之一:
-
Optimal Advantage function 优势函数:
\(A^*(s,a)=Q^*(s,a)-V^*(s)\)
V* 作为 baseline ,优势函数的意思是动作 a 相对 V* 的优势,A*越好,那么优势就越大。
下面介绍一个优势函数有关的定理:
定理一:\(V^*(s)=\mathop{max}\limits_a Q^*(s,a)\)
这一点从上面的回顾不难看出,求得最优的路径不同,但是相等。
上面提到了优势函数的定义:\(A^*(s,a)=Q^*(s,a)-V^*(s)\)
同时对左右求最大值:\(\mathop{max}\limits_{a}A^*(s,a)=\mathop{max} \limits_{a}Q^*(s,a)-V^*(s)\),而等式右侧正是上面定理,所以右侧==0;因此优势函数关于a的最大值=0,即:
\(\mathop{max}\limits_{a}A^*(s,a)=0\)
我们把这个 0 值式子加到定义上,进行简单变形:
定理二:\(Q^*(s,a)=V^*(s)+A^*(s,a)-\mathop{max}\limits_{a}A^*(s,a)\)
Dueling Network 就是由定理二得到的。
12.2 Dueling Network 原理
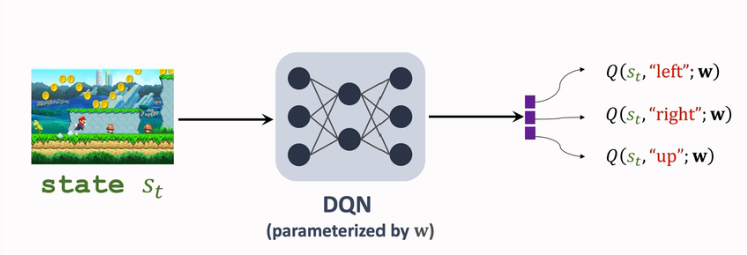
此前 DQN 用\(Q(s,a;w)\) 来近似 \(D^*(s,a)\) ,结构如下:
而 Dueling Network 对 DQN 的结构改进原理是:
-
我们对于DQN的改进思路就是基于上面的定理2:\(Q^*(s,a)=V^*(s)+A^*(s,a)-\mathop{max}\limits_{a}A^*(s,a)\)
- 分别用神经网络 V 和 A 近似 V-star 和 A-star
- 即:\(Q(s,a;w^A,w^V)=V(s;w^V)+A(s,a;w^A)-\mathop{max}\limits_{a}A(s,a;w^A)\)
- 这样也完成了对于 Q-star 的近似,与 DQN 的功能相同。
-
首先需要用一个神经网络 \(V(s;w^V)\) 来近似 \(V^*(s)\):
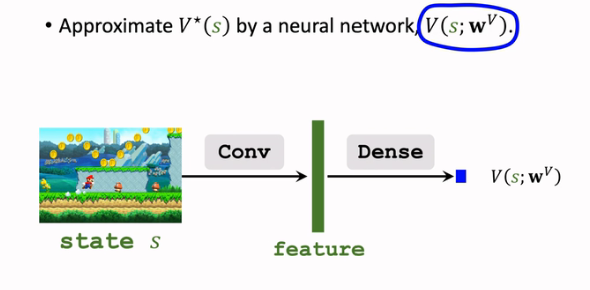
注意这里的输出是一个实数,是对状态的打分,而非向量;
- 用另一个神经网络\(A(s,a;w^A)\) 对\(A^*(s,a)\) 进行近似:
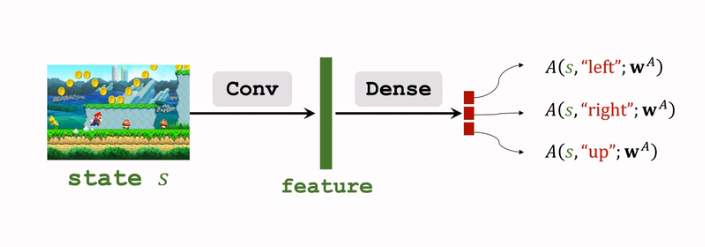
这个网络和上面的网络 \(V\) 结构有一定的相像,可以共享卷积层的参数;
后续为了方便,令 \(w=(w^A,w^V)\),即:
现在 左侧 与 DQN 的表示就一致了。下面搭建Dueling Network,就是上面 V 和 A 的拼接与计算:
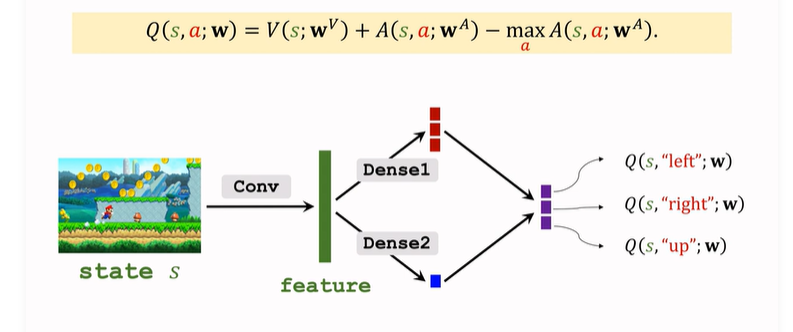
- 输入 状态 s,V 和 A 共享一些 卷积层,得到特征向量;
- 分别通过不同的全连接层,A输出向量,V输出实数;
- 通过上面的式子运算输出最终结果,是对所有动作的打分;
可见Dueling Network 的输入 和 输出 和 DQN 完全一样,功能也完全一样;但是内部的结构不同,Dueling Network 的结构更好,所以表现要比 DQN好;
注意,Dueling Network 和 DQN 都是对 最优动作价值函数 的近似。
12.3 训练 Dueling Network
接下来训练参数 \(w=(w^A,w^v)\),采用与 DQN 相同的思路,也就是采用 TD算法训练 Dueling Network。
之前介绍的 TD算法 的三种优化方法:
- 经验回放 / 优先经验回放
- Double DQN
- M-step TD target
都可以用在 训练 Dueling Network 上。
12.4 数学原理与不唯一性
之前推导 Dueling Network 原理的时候,有如下两个式子:
- \(Q^*(s,a)=V^*(s)+A^*(s,a)\)
- \(Q^*(s,a)=V^*(s)+A^*(s,a)-\mathop{max}\limits_{a}A^*(s,a)\)
我们为什么一定要用等式 2 而不是等式 1 呢?也就是为什么要加上一个 值为 0 的 \(\mathop{max}\limits_{a}A^*(s,a)\)?
-
这是因为 等式1 有一个问题。
-
即我们无法通过学习 Q-star 来 唯一确定 V-star 和 A-star,即对于求得的 Q-star 值,可以分解成无数组 V-star 和 A-star。
-
\(Q(s,a;w^A,w^V)=V(s;w^V)+A(s,a;w^A)-\mathop{max}\limits_{a}A(s,a;w^A)\)
-
我们是对 左侧Q 来训练整个 Dueling Network 的。如果 V 网络 向上波动 和 A 网络向下波动幅度相同,那么 Dueling Network 的输出完全相同,但是V-A两个网络都发生了波动,训练不好。
-
而加上最大化这一项就能避免不唯一性;即如果 V-star 向上波动10,A-star 向下波动10,那么整个式子的值会发生改变
因为max项随着A-star 的变化 也减少了10,总体上升了10
在上面的数学推导中,我们使用的是 \(\max \limits_{a}A(s,a;w^A)\)来近似最大项\(\max\limits_{a}A(s,a)\),而在实际应用中,用 \(\mathop{mean}\limits_{a}A(S,a;w^A)\)来近似效果更好;这种替换没有理论依据,但是实际效果好。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号