
关于图的一点东西
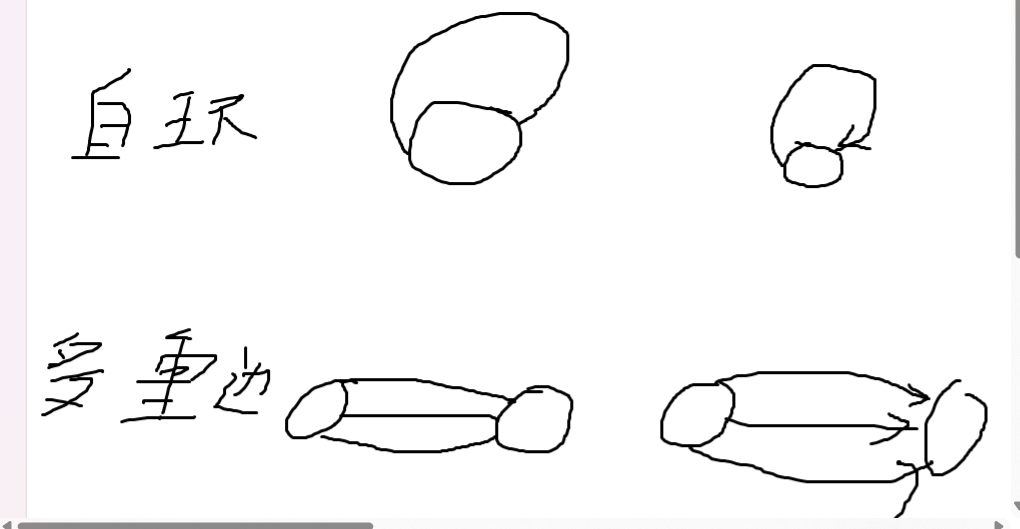
自环的应用比如说在一个网页界面,我可以点击一个跳转到当前业面的链接,形成自环。
多重边的应用比如飞机航班,一个地方到另一个地方可以有多条航线,这些航线的属性比如价格,时间等会有不同。
图可以表示为G=(V,E),V表示顶点集,E表示边集,|V|表示顶点的数量,|E|表示边的数量。G就是有序对。
无权图就是权重为1的有权图
城际交通路可以看作加权无向图,社交网络可以看作非加权无向图,万维网为非加权有向图。一个无向图可以化为有向图,反之不行。。
不含有自环或者多重环的图是简单图。
对于有向的简单图而言,当|V|=n时,0<=|E|<=n*(n-1).
无向的简单图而言,当|V|=n,0<=|E|<=(n*(n-1))/2
如果一个图的边数越接近顶点数的平方,就说明这个图越密集,反之越稀疏。对于越密集和稀疏的图,使用不同的数据结构存储,前者多用邻接矩阵,后者多用邻接表。
一个path指没有顶点或者边重复的途径。
一个walk指允许重复的途径。
一个trail就是说顶点可以重复,但是边不允许重复。通常说路径指的就是简单路径
就是path。
如果任何一个顶点都可以到达任意一个顶点,对于满足这个要求的无向图说connected,
对于满足这个要求的有向图说strongly connected强连接。
对于closed walk,就是说开始和结束都在一个相同的节点上,并且经过的边数大于0。
一个二叉树就是一个无向无环图,而把有向无环图称为DAG(Directed acyclic Graphs)
acyclic就是没有环路的意思。
数据结构的宗旨就是,对于最频繁的操作,一定要让它的耗费时间最低。另外空间尽量小
对于图的表示法,边列表表示法,开辟2个数组,1个存储顶点的名称比如A,B啥的,1个存储边的信息(即当前边,与其连接的1个边,这条边的权重),Edge的话用结构体或类表示,三个元素,可以直接用char*去指向名称字符串的地址,也可string,不过char*比string好点,string要拷贝,,当然更好一点的话,类里用int表示起始点和终点,然后用第一个数组的下标替代名称字符串。这样空间是O(|V|+|E|),如果要查一个节点的邻接节点,就得遍历第二个数组,时间O(|E|)对于简单图来说就O(n^2),很慢。如果是O(|V|)就好了。
ok,第二种邻接矩阵表示法。(示例为无向无权)存储顶点的名称的数组不变,然后用一个二维数组(大小为|V|*|V|),K(ij)=1表示第一个数组里下标为i的节点与下标为j的节点相连,如果不相连置0即可,按这样的话那么对于无向图来说这个矩阵就是对称的因为有kij就有kji,那么这时候如果我们想知道一个节点的邻接节点的话,只需要从第一个数组里得到那个节点的下标,然后遍历邻接矩阵的某一行即可时间就是O(V),当然为了不每次遍历第一个数组,可以用unordered_map,key是节点名称,value是节点下标,那么每次查询下标就是O(1)。 如果想知道两个节点是否相连O(1)+O(1),非常快。 对于无向带权图,只需要在邻接矩阵里对应位置写权,其他位置弄一个不可能的数就行。 但是邻接矩阵的缺点就是如果V很大,并且E很小,也就是稀疏图而言,矩阵的空间被大量浪费,如果是密集图还好可以充分利用,但是现实里基本都是稀疏图,比如QQ啥的社交网络,那么多用户,你不可能和每个人都有联系,所以基本都是稀疏图。
如果V足够大,那么现实里|E|<<|v|.
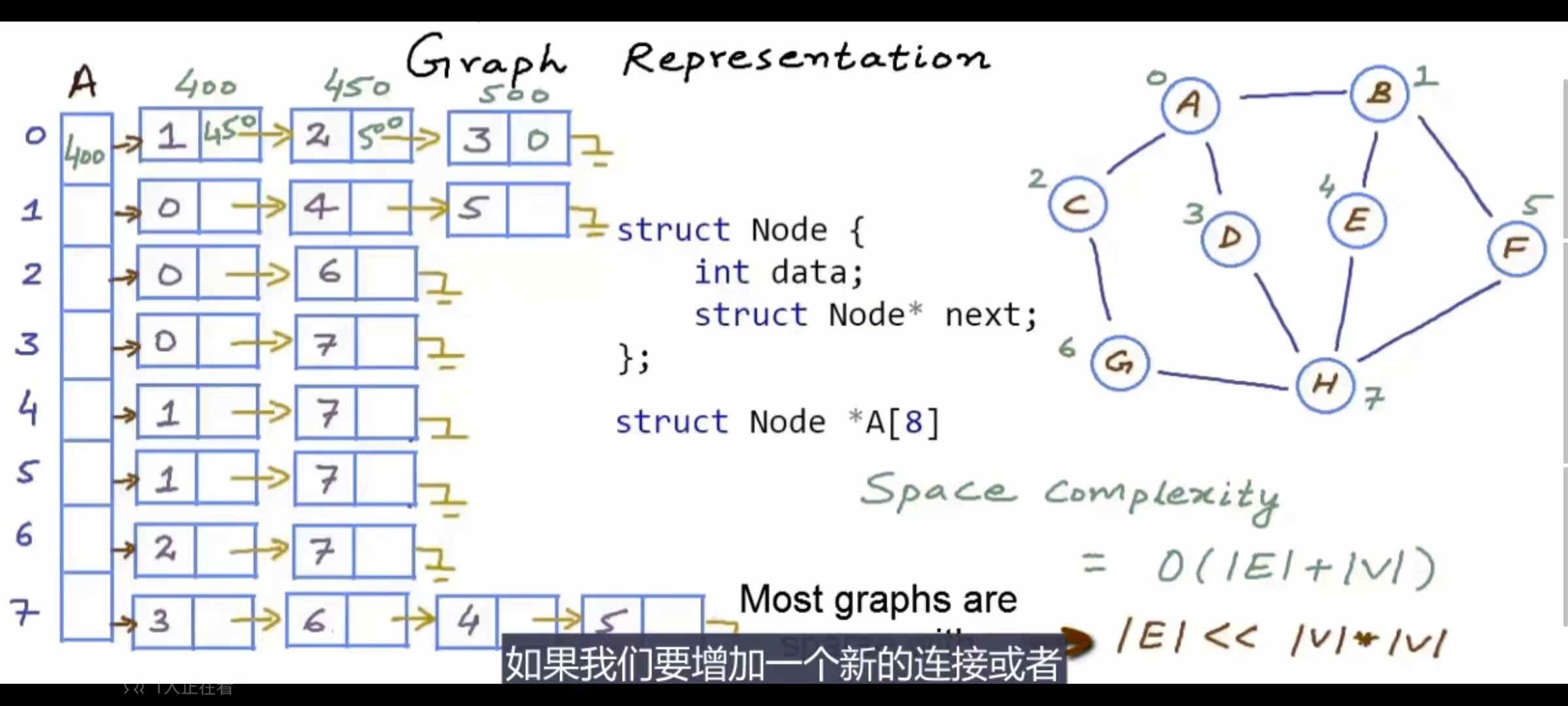
ok,第三种邻接表 表示法。(示例为无向无权图)存储顶点的名称的数组不变,然后搞一个指针数组int*[]A,然后每个指针指向不同的一维数组,那么A[0][k],就表示第一个数组里下标为0的那个名称的节点与下标A[0][K]的节点相连,此时A[0]的那个一维数组的下标没有用,它的内容有用。这样的话如果想要知道两个节点是否相连,那么仍然unordered_map确保找到那个节点下标为O(1),但是还是得遍历A[下标]的数组,而且你不能保证我的这个数组就是有序的,(如果有序可以二分O(log2(n))但是每次要排序很麻烦),所以时间复杂度为O(V)(讨论最坏情况下)。 如果想知道一个节点的所以邻接节点,那么一样还得去遍历那个A[下标]的数组,时间为O(v),但是其实实际来看由于大多是稀疏图,所以遍历的效率仍然远远高于邻接矩阵的按行遍历。
但是上面的一维数组表示的flexibility<<链表表示的flexibility<<二叉搜索树表示的flexibility
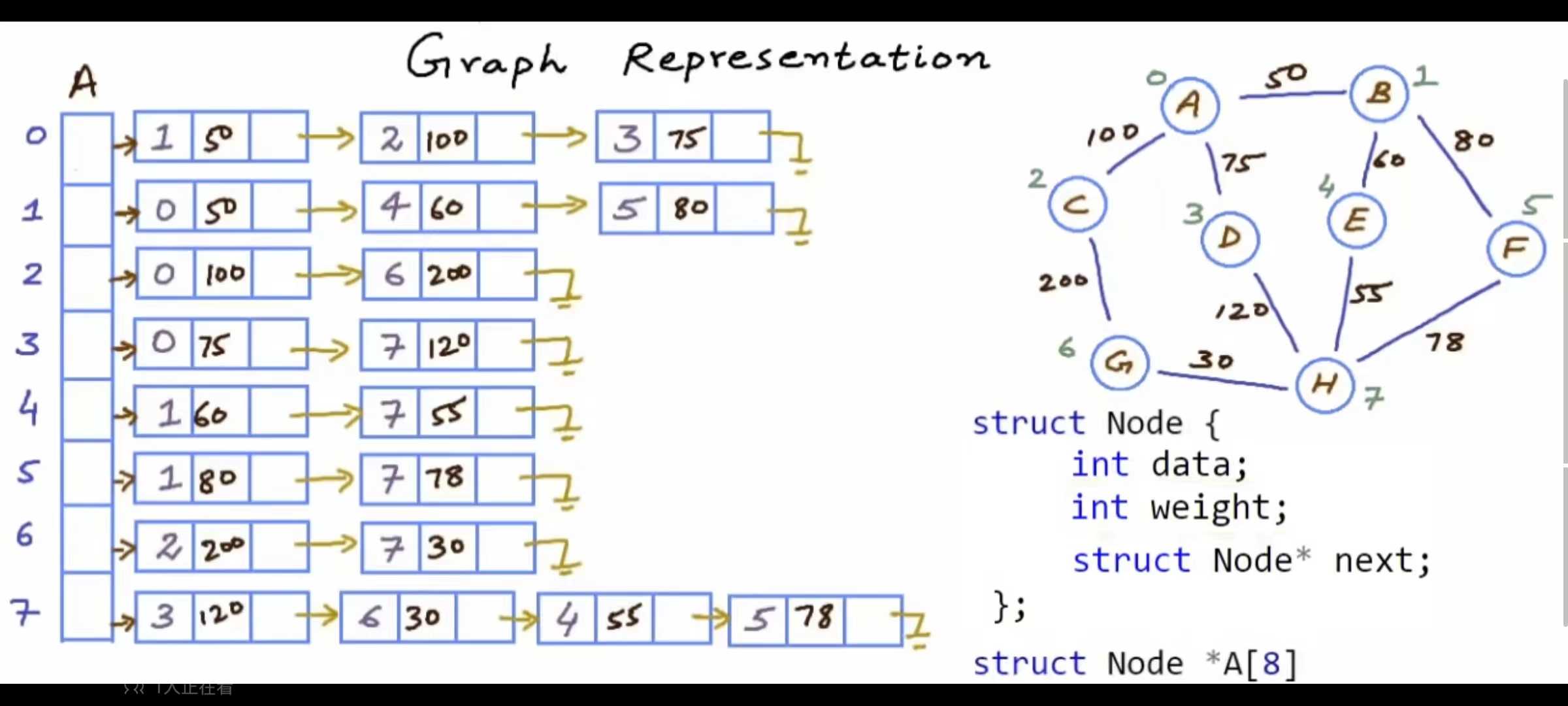
因为如果要求增删的话,邻接矩阵就是定位好后 0->1 1->0即可,就是O(1),单数如果一维数组的话就得扩增数组大小不好,所以换为链表,免除了扩展数组的烦恼并且尾插时间是O(当前这个链表里的个数),删除的话先定位其实时间也一样,效率没变,但是可以给struct加权了(无向有权也ok),那么还能不能再次改善呢?没错构建二叉搜索树,BstNode*A[k],A[k]里就是指向root的头结点,那样的话如果有权我可以向struct里加属性,而且一个平衡的二叉搜索树搜索节点的效率是O(log2(n)),遍历的话就是O(|E|),插入是O(log2(n)),就是说树的相关操作其实和其高度是密不可分的,一个平衡的二叉搜索树的高度差不多就是log2(n),所以删除的时间和空间也是O(log2(n))。
只有平衡的二叉搜索树的高度才是log2(n),AVI树和红黑树就是这种情况。
邻接矩阵 邻接表 邻接矩阵 邻接表(数组)
时间复杂度 时间复杂度 空间复杂度 空间复杂度
判断2个节点是否相连 1 |E(该节点的)| |V|+|V*V| |V|+|E|
遍历一个节点邻接节点 |V| |E(该节点的)|
增 1 |E(该节点的)|
删 1 |E(该节点的)|

 浙公网安备 33010602011771号
浙公网安备 33010602011771号