ROS 面部识别
/*
* Copyright (C) 2017, Lentin Joseph and Qbotics Labs Inc.
* Email id : qboticslabs@gmail.com
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions are met:
* * Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
* * Neither the names of Stanford University or Willow Garage, Inc. nor the names of its
* contributors may be used to endorse or promote products derived from
* this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
* ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
* LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
* SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
* INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
* CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
* ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
* This code will track the faces using ROS
*/
//ROS headers
#include <ros/ros.h>
#include <image_transport/image_transport.h>
#include <cv_bridge/cv_bridge.h>
#include <sensor_msgs/image_encodings.h>
//Open-CV headers
#include "opencv2/opencv.hpp"
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
//#include "opencv2/objdetect.hpp"
//Centroid message headers
#include <face_tracker_pkg/centroid.h>
//OpenCV window name
static const std::string OPENCV_WINDOW = "raw_image_window";
static const std::string OPENCV_WINDOW_1 = "face_detector";
using namespace std;
using namespace cv;
class Face_Detector
{
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_;
image_transport::Publisher image_pub_;
ros::Publisher face_centroid_pub;
face_tracker_pkg::centroid face_centroid;
string input_image_topic, output_image_topic, haar_file_face;
int face_tracking, display_original_image, display_tracking_image, center_offset, screenmaxx;
public:
Face_Detector()
: it_(nh_)
{
//Loading Default values
input_image_topic = "/usb_cam/image_raw";
output_image_topic = "/face_detector/raw_image";
haar_file_face = "/home/robot/face.xml";
face_tracking = 1;
display_original_image = 1;
display_tracking_image = 1;
screenmaxx = 640;
center_offset = 100;
//Accessing parameters from track.yaml
try{
nh_.getParam("image_input_topic", input_image_topic);
nh_.getParam("face_detected_image_topic", output_image_topic);
nh_.getParam("haar_file_face", haar_file_face);
nh_.getParam("face_tracking", face_tracking);
nh_.getParam("display_original_image", display_original_image);
nh_.getParam("display_tracking_image", display_tracking_image);
nh_.getParam("center_offset", center_offset);
nh_.getParam("screenmaxx", screenmaxx);
ROS_INFO("Successfully Loaded tracking parameters");
}
catch(int e)
{
ROS_WARN("Parameters are not properly loaded from file, loading defaults");
}
// Subscribe to input video feed and publish output video feed
image_sub_ = it_.subscribe(input_image_topic, 1,
&Face_Detector::imageCb, this);
image_pub_ = it_.advertise(output_image_topic, 1);
face_centroid_pub = nh_.advertise<face_tracker_pkg::centroid>("/face_centroid",10);
}
~Face_Detector()
{
if( display_original_image == 1 or display_tracking_image == 1)
cv::destroyWindow(OPENCV_WINDOW);
}
void imageCb(const sensor_msgs::ImageConstPtr& msg)
{
cv_bridge::CvImagePtr cv_ptr;
namespace enc = sensor_msgs::image_encodings;
try
{
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
string cascadeName = haar_file_face;
CascadeClassifier cascade;
if( !cascade.load( cascadeName ) )
{
cerr << "ERROR: Could not load classifier cascade" << endl;
}
if (display_original_image == 1){
imshow("Original Image", cv_ptr->image);
}
detectAndDraw( cv_ptr->image, cascade );
image_pub_.publish(cv_ptr->toImageMsg());
waitKey(30);
}
void detectAndDraw( Mat& img, CascadeClassifier& cascade)
{
double t = 0;
double scale = 1;
vector<Rect> faces, faces2;
const static Scalar colors[] =
{
Scalar(255,0,0),
Scalar(255,128,0),
Scalar(255,255,0),
Scalar(0,255,0),
Scalar(0,128,255),
Scalar(0,255,255),
Scalar(0,0,255),
Scalar(255,0,255)
};
Mat gray, smallImg;
cvtColor( img, gray, COLOR_BGR2GRAY );
double fx = 1 / scale ;
resize( gray, smallImg, Size(), fx, fx, INTER_LINEAR );
equalizeHist( smallImg, smallImg );
t = (double)cvGetTickCount();
cascade.detectMultiScale( smallImg, faces,
1.1, 15, 0
|CASCADE_SCALE_IMAGE,
Size(30, 30) );
t = (double)cvGetTickCount() - t;
for ( size_t i = 0; i < faces.size(); i++ )
{
Rect r = faces[i];
Mat smallImgROI;
vector<Rect> nestedObjects;
Point center;
Scalar color = colors[i%8];
int radius;
double aspect_ratio = (double)r.width/r.height;
if( 0.75 < aspect_ratio && aspect_ratio < 1.3 )
{
center.x = cvRound((r.x + r.width*0.5)*scale);
center.y = cvRound((r.y + r.height*0.5)*scale);
radius = cvRound((r.width + r.height)*0.25*scale);
circle( img, center, radius, color, 3, 8, 0 );
face_centroid.x = center.x;
face_centroid.y = center.y;
//Publishing centroid of detected face
face_centroid_pub.publish(face_centroid);
}
else
rectangle( img, cvPoint(cvRound(r.x*scale), cvRound(r.y*scale)),
cvPoint(cvRound((r.x + r.width-1)*scale), cvRound((r.y + r.height-1)*scale)),
color, 3, 8, 0);
}
//Adding lines and left | right sections
Point pt1, pt2,pt3,pt4,pt5,pt6;
//Center line
pt1.x = screenmaxx / 2;
pt1.y = 0;
pt2.x = screenmaxx / 2;
pt2.y = 480;
//Left center threshold
pt3.x = (screenmaxx / 2) - center_offset;
pt3.y = 0;
pt4.x = (screenmaxx / 2) - center_offset;
pt4.y = 480;
//Right center threshold
pt5.x = (screenmaxx / 2) + center_offset;
pt5.y = 0;
pt6.x = (screenmaxx / 2) + center_offset;
pt6.y = 480;
line(img, pt1, pt2, Scalar(0, 0, 255),0.2);
line(img, pt3, pt4, Scalar(0, 255, 0),0.2);
line(img, pt5, pt6, Scalar(0, 255, 0),0.2);
putText(img, "Left", cvPoint(50,240), FONT_HERSHEY_SIMPLEX, 1, cvScalar(255,0,0), 2, CV_AA);
putText(img, "Center", cvPoint(280,240), FONT_HERSHEY_SIMPLEX, 1, cvScalar(0,0,255), 2, CV_AA);
putText(img, "Right", cvPoint(480,240), FONT_HERSHEY_SIMPLEX, 1, cvScalar(255,0,0), 2, CV_AA);
if (display_tracking_image == 1){
imshow( "Face tracker", img );
}
}
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "Face tracker");
Face_Detector ic;
ros::spin();
return 0;
}
做面部识别需要摄像头一个, 我用的罗技C310.
首先先决是装opencv, 如果一开始选择的桌面完全版的indigo, opencv默认就装好了.
然后是usb_cam, 通过git上面的usb_cam拉下来就可以了, 记得建一个dependecies的workspace, 然后把需要的包都丢进去, 编译完要source devel/setup.bash一下.
$ git clone https://github.com/bosch-ros-pkg/usb_cam.git
没想到还是博世写的.
然后是解压缩:
$ sudo apt-get install v4l-utils
由于我的笔记本自带一个简单的屏幕顶摄像头, 所以这个罗技就是/dev/ideo2, 下面的launch都要修改以下设备名才行.
即插即用, 用cheese可以看看摄像头可用不.
用usb_cam这个节点看看能否获取摄像头图像, 这里有个问题, 不知道为什么, 一旦ctrl+c停止程序了, 需要插拔摄像头节点才能获取设备,不知道是不是open/close的方法不对.
$ rosrun usb_cam usb_cam-test.launch
接着就是重点了, 建一个包
$ catkin_create_pkg face_tracker_pkg roscpp rospy std_msgs message_generation
接着是脸部识别的定义文件(谁有更好的翻译), 这个文件为face_tracker_pkg/data/face.xml, 里面定义了一些有关脸部的信息, 如果你的脸跟这些信息match, 那就会当作脸了(车牌识别也是这个意思), 然后它会通过一个topic返回一个xy值说明你的脸中心点在图像的哪个位置.
现在分析一下核心的cpp:
首先是引入:
//ROS headers #include <ros/ros.h> #include <image_transport/image_transport.h> #include <cv_bridge/cv_bridge.h> #include <sensor_msgs/image_encodings.h> //Open-CV headers #include "opencv2/opencv.hpp" #include <opencv2/imgproc/imgproc.hpp> #include <opencv2/highgui/highgui.hpp> //#include "opencv2/objdetect.hpp" //Centroid message headers #include <face_tracker_pkg/centroid.h>
引入了头文件, 包括OpenCV, 跟msg文件的头.
这个centroid.msg, 其实就是一个int32 x, 一个int32 y, 用于输出脸的中心点的在视口的位置.
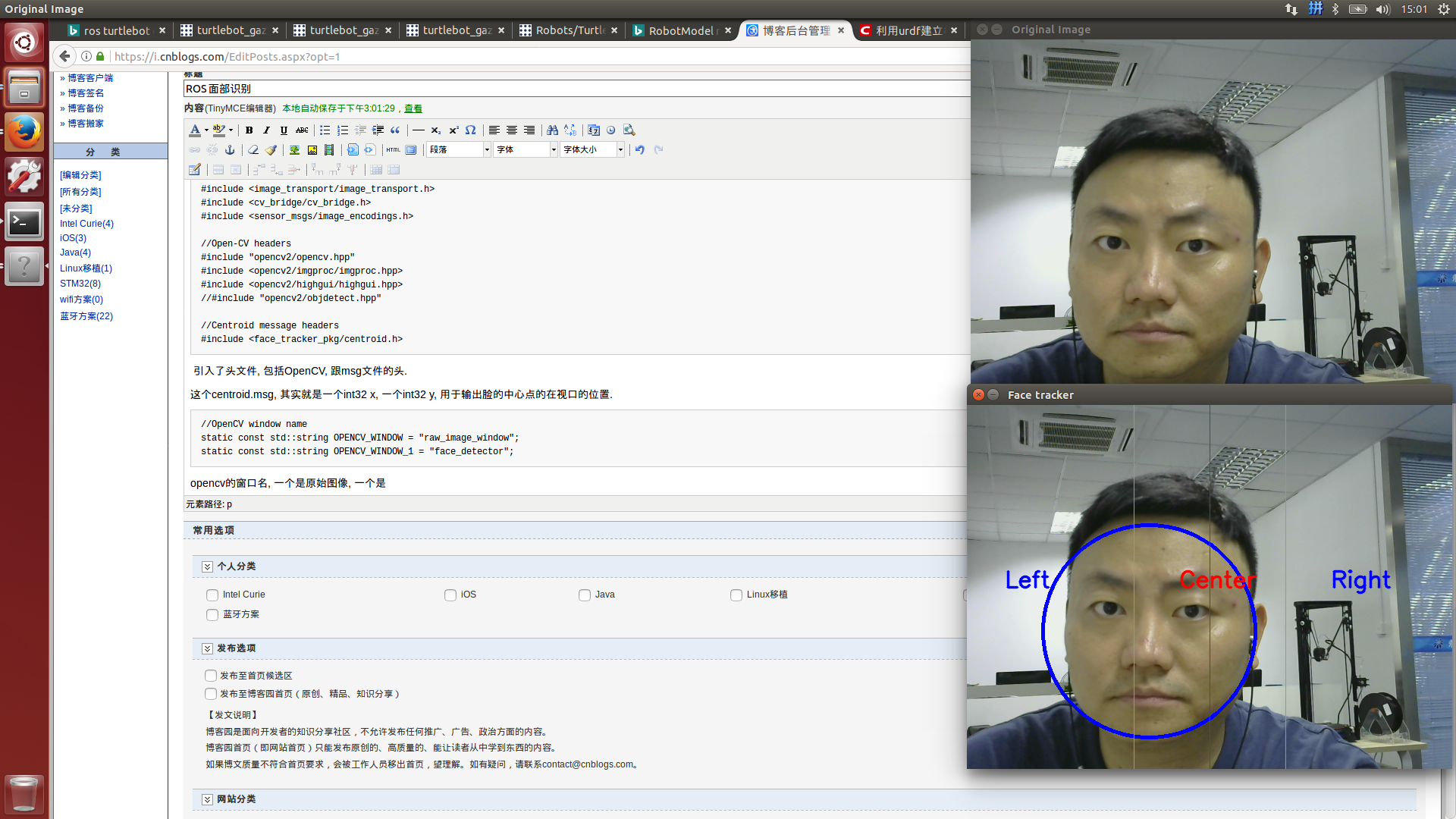
//OpenCV window name static const std::string OPENCV_WINDOW = "raw_image_window"; static const std::string OPENCV_WINDOW_1 = "face_detector";
opencv的窗口名, 一个是原始图像, 一个是做了识别之后的窗口, 如前面显示的.
class Face_Detector
{
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_;
image_transport::Publisher image_pub_;
ros::Publisher face_centroid_pub;
face_tracker_pkg::centroid face_centroid;
string input_image_topic, output_image_topic, haar_file_face;
int face_tracking, display_original_image, display_tracking_image, center_offset, screenmaxx;
...
这个类就是用于识别的.
变量有
NodeHandle, 这个ROS的句柄, 无论如何都有.
然后是三个图像数据传输的: image_transport::ImageTransport, Subsriber, Publisher, 就是从dev/ideo1传输过来的数据.
然后是centroid的Publisher, 用于传输识别后的脸的位置.
然后是输入输出的topic的名字, 以及haar的文件位置.
以及图像的几个int变量.
public:
Face_Detector(): it_(nh_){
//Loading Default values
input_image_topic = "/usb_cam/image_raw";
output_image_topic = "/face_detector/raw_image";
haar_file_face = "/home/robot/face.xml";
face_tracking = 1;
display_original_image = 1;
display_tracking_image = 1;
screenmaxx = 640;
center_offset = 100;
try{
nh_.getParam("image_input_topic", input_image_topic);
nh_.getParam("face_detected_image_topic", output_image_topic);
nh_.getParam("haar_file_face", haar_file_face);
nh_.getParam("face_tracking", face_tracking);
nh_.getParam("display_original_image", display_original_image);
nh_.getParam("display_tracking_image", display_tracking_image);
nh_.getParam("center_offset", center_offset);
nh_.getParam("screenmaxx", screenmaxx);
ROS_INFO("Successfully Loaded tracking parameters");
}
catch(int e)
{
ROS_WARN("Parameters are not properly loaded from file, loading defaults");
}
// Subscribe to input video feed and publish output video feed
image_sub_ = it_.subscribe(input_image_topic, 1, &Face_Detector::imageCb, this);
image_pub_ = it_.advertise(output_image_topic, 1);
face_centroid_pub = nh_.advertise<face_tracker_pkg::centroid>("/face_centroid",10);
}
然后是一个构造方法, 初始化
重点是subscribe了input_image_topic, 然后指定一个callback: imageCb, 然后advertise了输出的image, 就是识别之后.
然后也是advertise了脸的中心点的topic: centroid
void imageCb(const sensor_msgs::ImageConstPtr& msg)
{
cv_bridge::CvImagePtr cv_ptr;
namespace enc = sensor_msgs::image_encodings;
try
{
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
string cascadeName = haar_file_face;
CascadeClassifier cascade;
if( !cascade.load( cascadeName ) )
{
cerr << "ERROR: Could not load classifier cascade" << endl;
}
if (display_original_image == 1){
imshow("Original Image", cv_ptr->image);
}
detectAndDraw( cv_ptr->image, cascade );
image_pub_.publish(cv_ptr->toImageMsg());
waitKey(30);
}
接着是, 收到image之后回调重点是拿到cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8); dectectAndDraw(cv_ptr->image, cascade),
识别过程中, 先把图像转成灰色的:
Mat gray, smallImg;
cvtColor( img, gray, COLOR_BGR2GRAY );
double fx = 1 / scale ;
resize( gray, smallImg, Size(), fx, fx, INTER_LINEAR );
equalizeHist( smallImg, smallImg );
t = (double)cvGetTickCount();
cascade.detectMultiScale( smallImg, faces, 1.1, 15, 0|CASCADE_SCALE_IMAGE, Size(30, 30) );
然后拿你的脸跟face定义里面的脸挨个对比.
然后画三条线, 并且加入一些字符, 左中右一类.
有关opencv的东西, 估计要学一个礼拜...略有小成...
track.yaml文件包含了一些ROS的参数,
比如输入的topic, haar文件位置, 是否显示原来的画面, 是否显示之后的画面.
start_tracking.launch文件:
<launch> <!-- Launching USB CAM launch files and Dynamixel controllers --> <include file="$(find face_tracker_pkg)/launch/start_usb_cam.launch"/> <!--<include file="$(find face_tracker_control)/launch/start_dynamixel.launch"/> --> <!-- Starting face tracker node --> <rosparam file="$(find face_tracker_pkg)/config/track.yaml" command="load"/> <node name="face_tracker" pkg="face_tracker_pkg" type="face_tracker_node" output="screen" /> </launch>
start_usb_cam.launch
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video1" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="auto_focus" value="false" />
<param name="io_method" value="mmap"/>
</node>
</launch>
所以是先启动节点为usb_cam, 然后载入track.yaml,
启动方法:
$ roslaunch face_tracker_pkg start_tracking.launch

 浙公网安备 33010602011771号
浙公网安备 33010602011771号