【RT-Thread】基于STM32+HAL库的RT-Thread移植(纯手动)
一、简介
RT-Thread官网![]() https://www.rt-thread.org/ 现在,市面上存在多种的嵌入式实时操作系统(RTOS),其中的RT-Thread 是由中国团队开发的开源嵌入式实时操作系统(RTOS),诞生于 2006 年,具有高可靠性、轻量级、易移植等特点,广泛应用于工业控制、消费电子、物联网等领域。
https://www.rt-thread.org/ 现在,市面上存在多种的嵌入式实时操作系统(RTOS),其中的RT-Thread 是由中国团队开发的开源嵌入式实时操作系统(RTOS),诞生于 2006 年,具有高可靠性、轻量级、易移植等特点,广泛应用于工业控制、消费电子、物联网等领域。
其特点:
1. 开源与社区支持
- 许可证:遵循 Apache 2.0 开源许可证,商业使用无需付费。
- 社区活跃:国内最大的 RTOS 社区之一,提供丰富的文档、教程和示例代码。
- 企业支持:得到华为、腾讯、ST 等厂商的支持,生态完善。
2. 核心特性
- 高可靠性:支持线程优先级、抢占式调度,适用于对实时性要求高的场景。
- 资源占用小:内核最小仅需 3KB ROM、1.2KB RAM,可裁剪性强。
- 组件丰富:
- 设备驱动:支持 UART、SPI、I2C、USB 等常见外设。
- 文件系统:支持 FatFS、LittleFS 等。
- 网络协议栈:支持 TCP/IP、MQTT、HTTP 等。
- 工具链:提供图形化配置工具 RT-Thread Studio。
3. 架构与生态
- 组件化设计:内核、设备驱动、中间件分离,方便集成第三方库。
- 软件包管理:通过
pkgs工具快速集成蓝牙、GUI、AI 等功能模块。 - 支持多架构:ARM Cortex-M/R/A、MIPS、RISC-V 等,适配超 200 款开发板。
4. 开发工具
- RT-Thread Studio:基于 Eclipse 的一站式开发环境,提供图形化配置、调试等功能。
- Env 工具:基于命令行的配置工具,适合 Linux 用户。
- 调试支持:集成 GDB、OpenOCD、PyOCD 等调试工具。
在这里我将说明为什么会推荐RT-Thread?因为该RTOS经过长久的发展至现在已经拥有了非常丰富的系统生态,并且拥有大量的用户支持。同时,RT-Thread拥有标准版、nano版、smart版等多个版本可对应不同的需求进行应用并且裁剪的自由度很大。尤其是RT-Thread拥有着极其丰富的组件、各种各样的软件包和对应各大厂商的开发板的BSP(板级支持包)。同时,已经有着专业的集成开发环境RT-Thread Studio极大地方便了用户的使用,我后续会介绍RT-Thread Studio。
获取RT-Thread nano 源码:
rt-thread.org/download.html![]() https://www.rt-thread.org/download.html
https://www.rt-thread.org/download.html

二、创建裸机项目示例
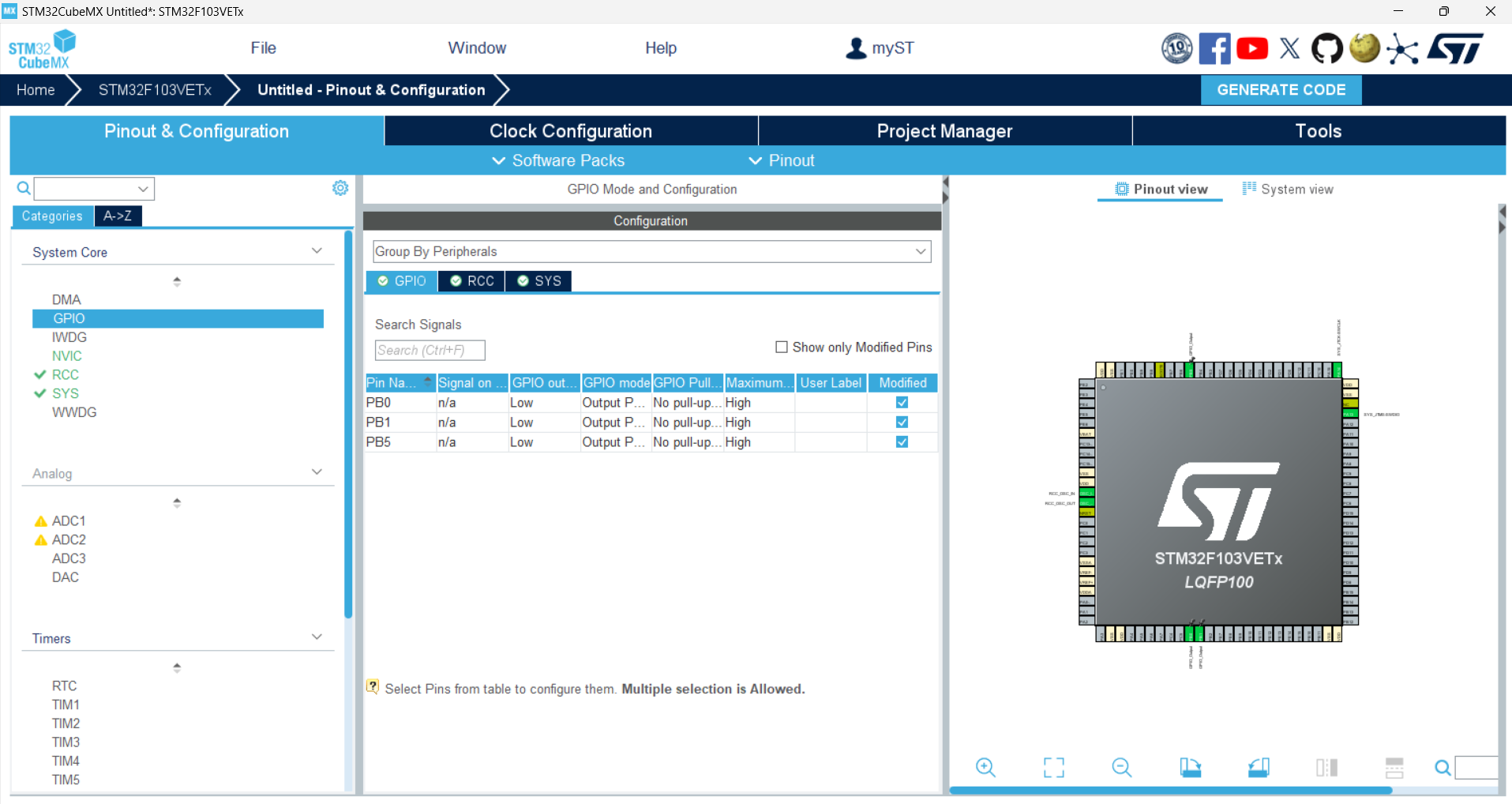
1.打开STM32CubeMX进行初始化3个GPIO用于点灯
RCC
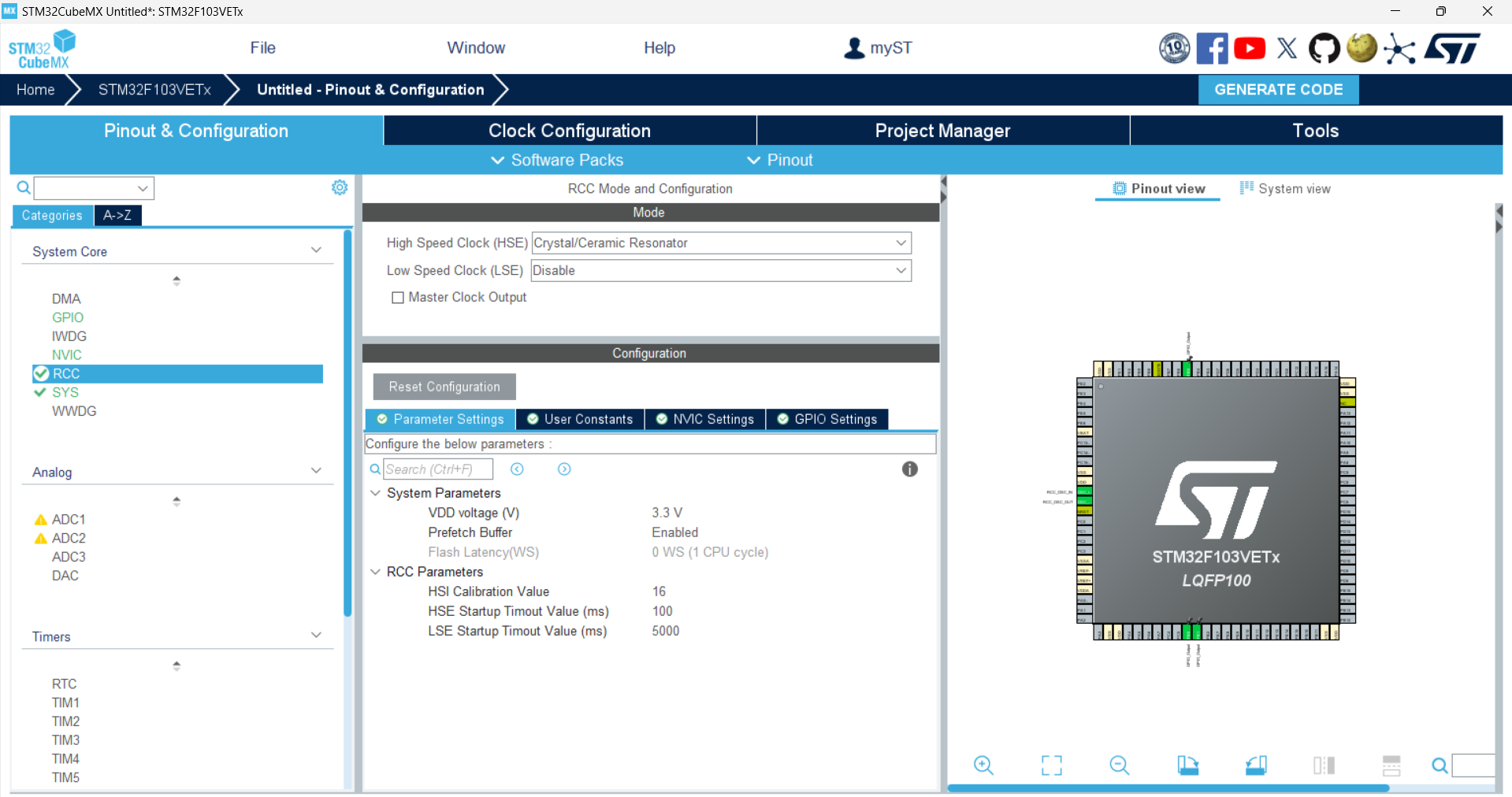
SWD
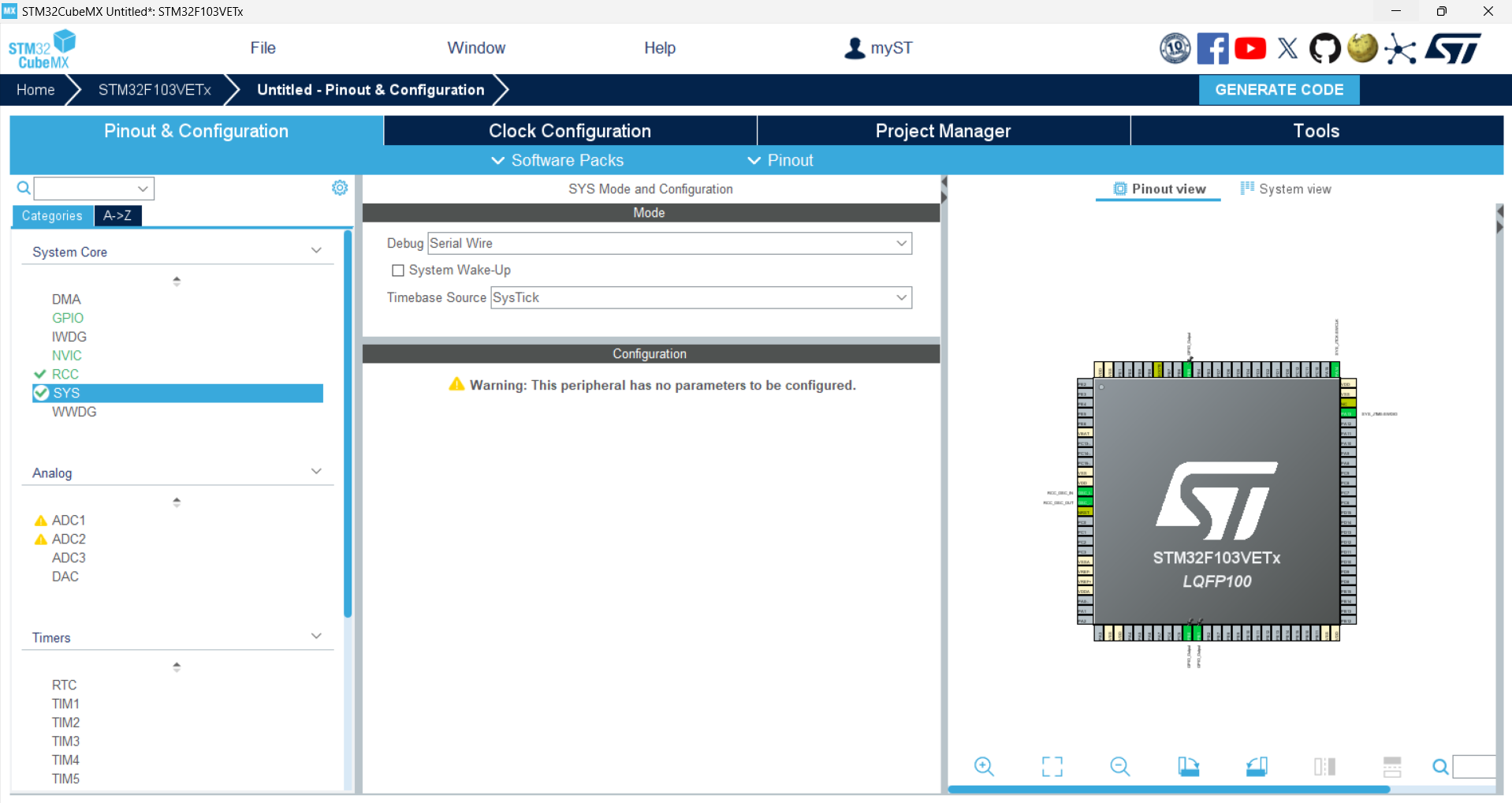
GPIO
注:因为后面没有使用finsh组件就可不用开启串口。
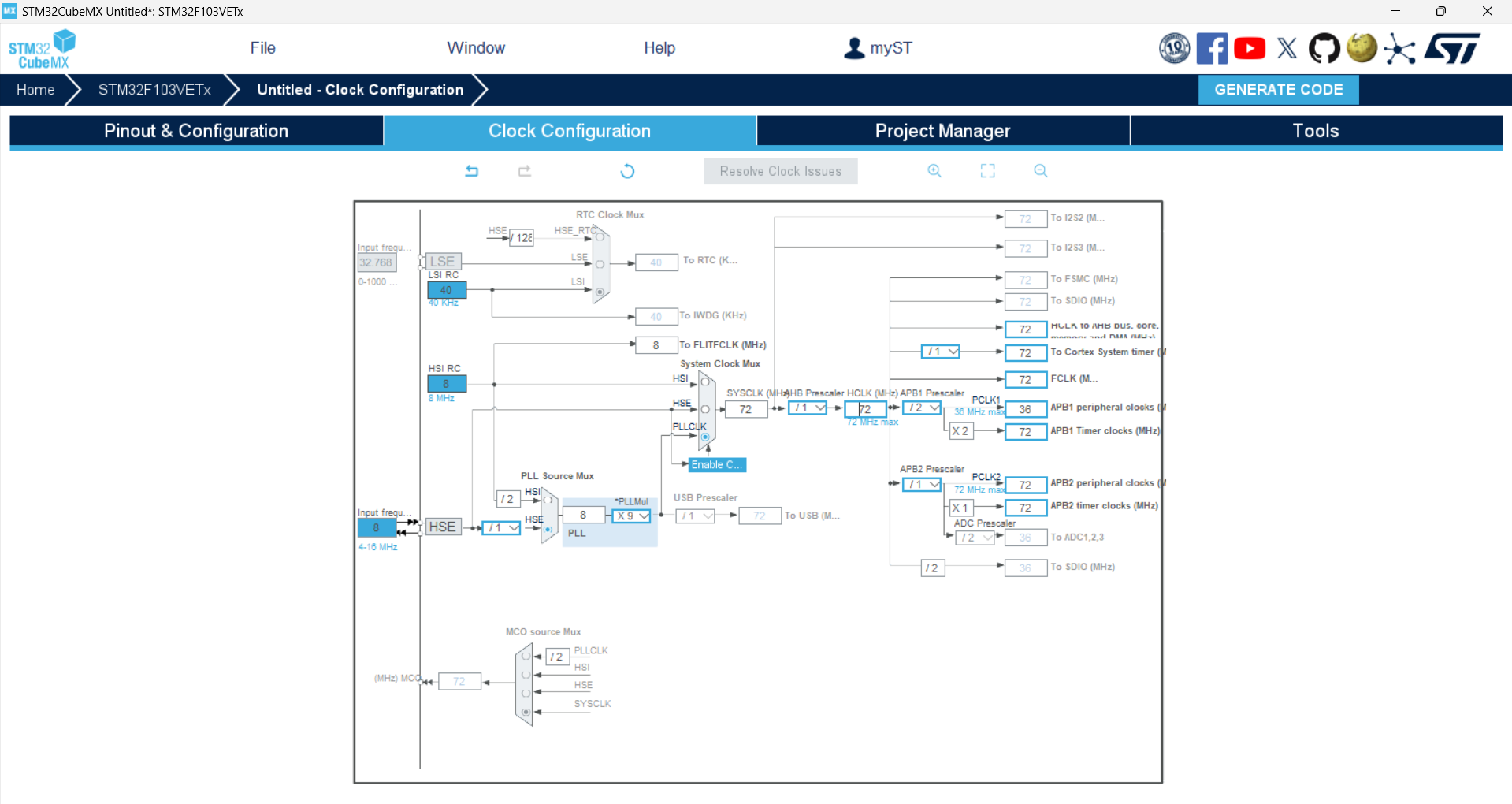
2.时钟树配置
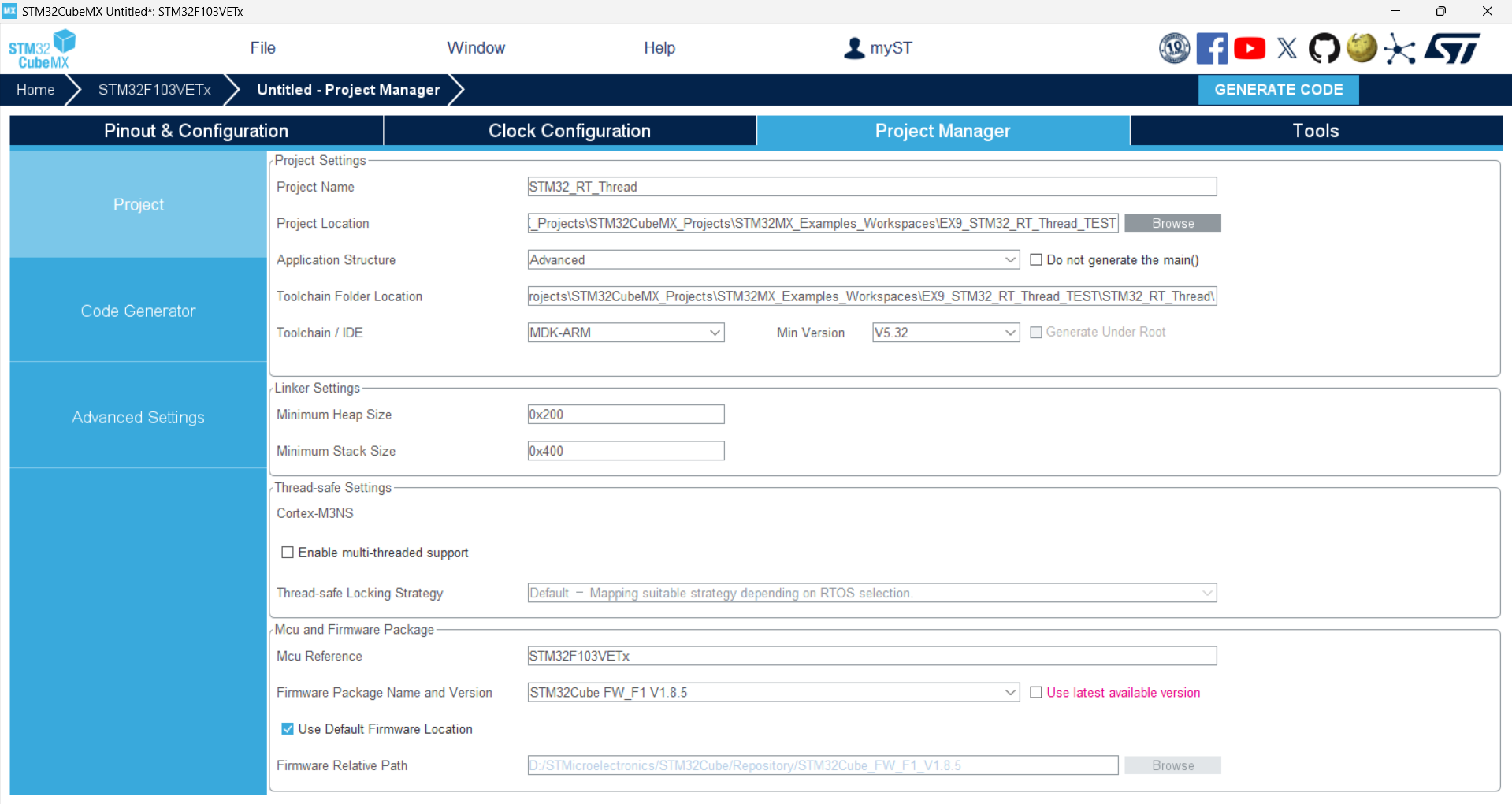
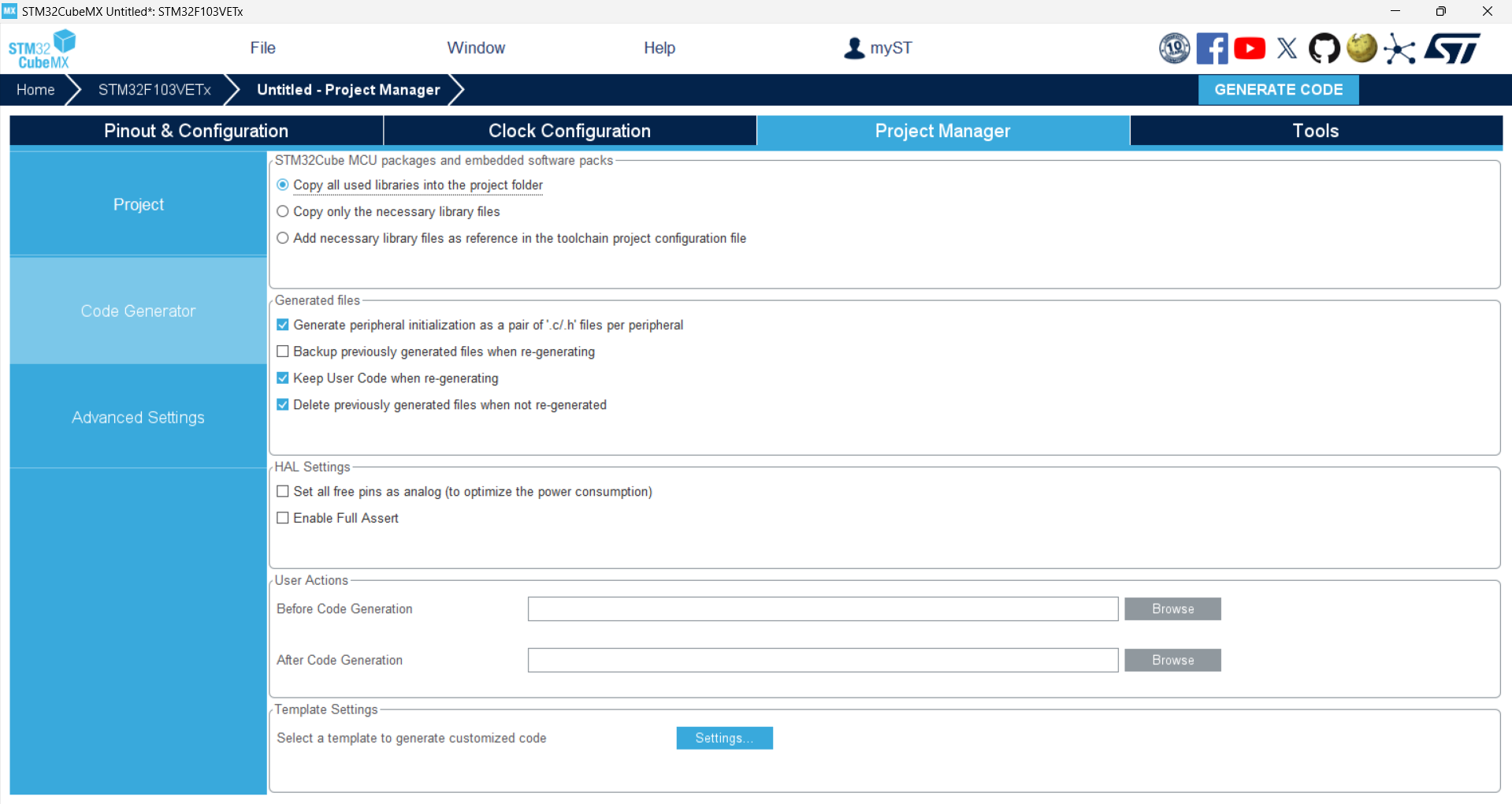
3.工程配置
三、RT-Thread移植
1.将解压后地RT-Tread源码复制到工程文件夹目录下

再新建一个文件夹RT_Thread

2.将\STM32_RT_Thread\rt-thread-3.1.5\bsp\stm32\stm32f103-fire-arbitrary下的rtconfig.h复制到RT_Thread下的文件夹config

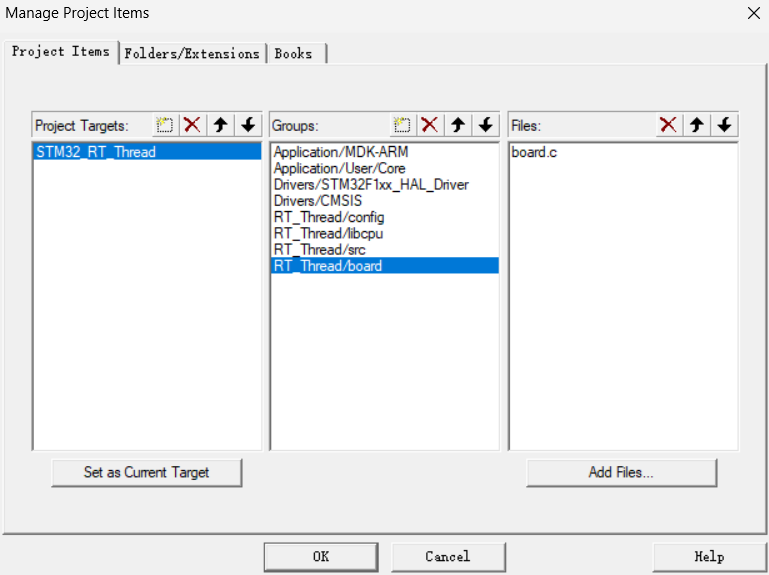
3.将\STM32_RT_Thread\rt-thread-3.1.5\bsp\stm32\stm32f103-fire-arbitrary\board下的board.c、board.h复制到RT_Thread下的文件夹board
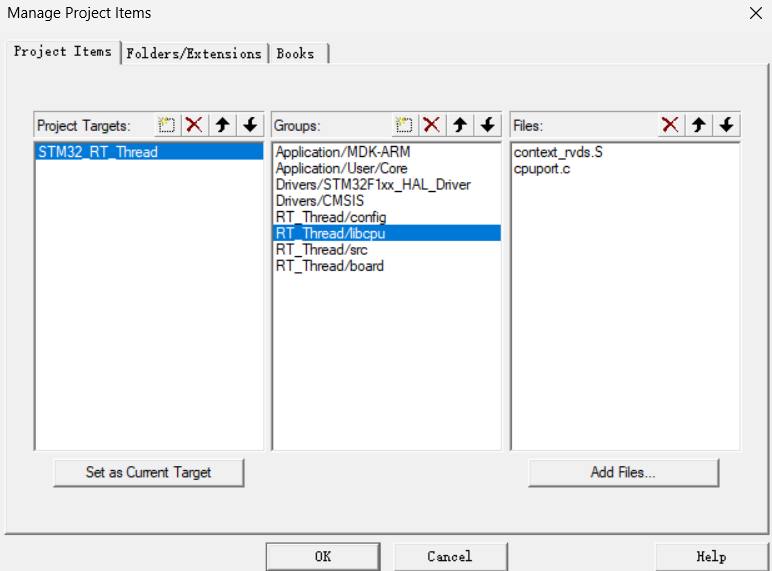
4.根据自己的实际硬件平台具有的内核架构选择,将\STM32_RT_Thread\rt-thread-3.1.5\libcpu\arm\cortex-m3下的context_rvds.S、cpuport.c复制到\STM32_RT_Thread\RT_Thread\libcpu\arm\cortex-m3
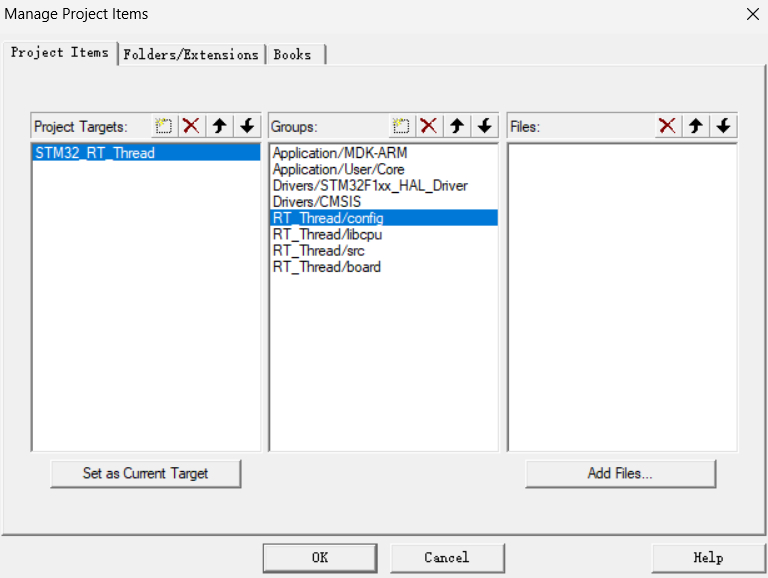
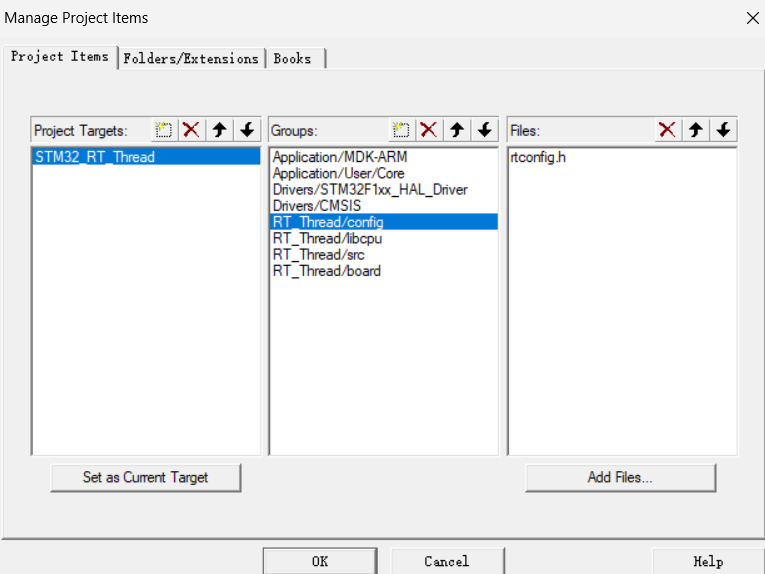
5.在KEIL里新建4个组别RT_Thread/config,RT_Thread/libcpu,RT_Thread/src,RT_Thread/board
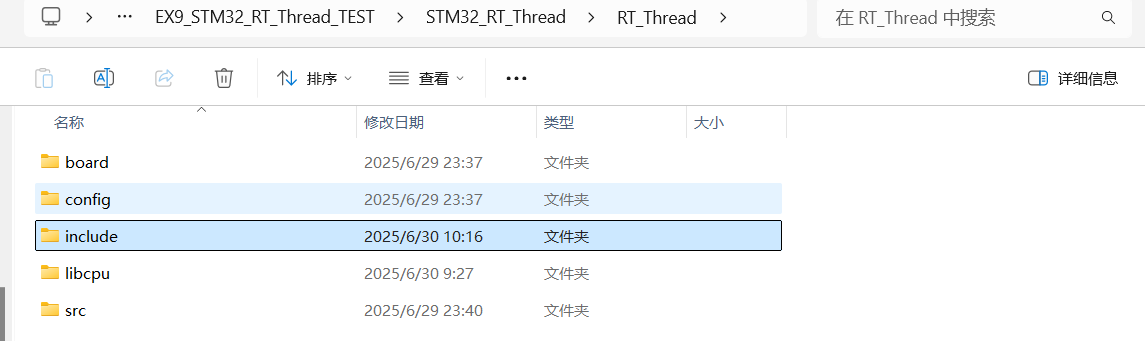
6.将\STM32_RT_Thread\rt-thread-3.1.5下的include文件夹整个复制到\STM32_RT_Thread\RT_Thread下
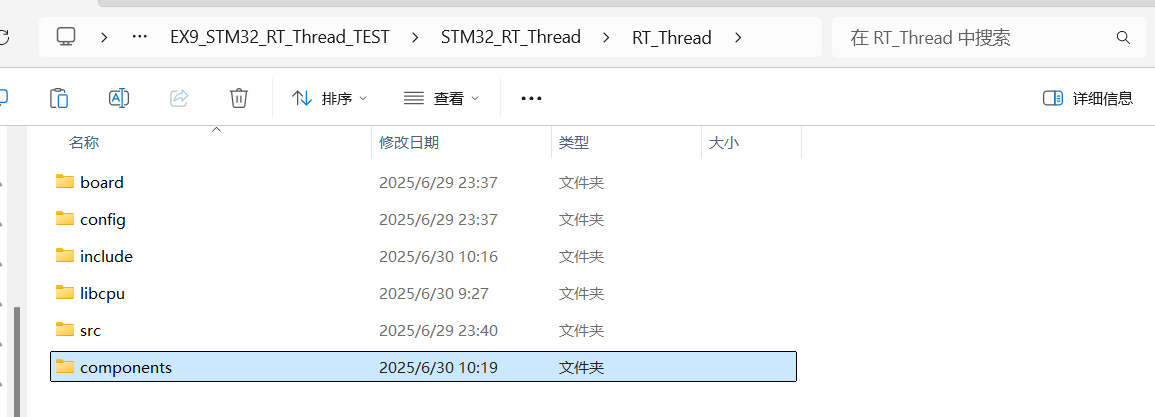
7.将\STM32_RT_Thread\rt-thread-3.1.5的components整个复制到\STM32_RT_Thread\RT_Thread下
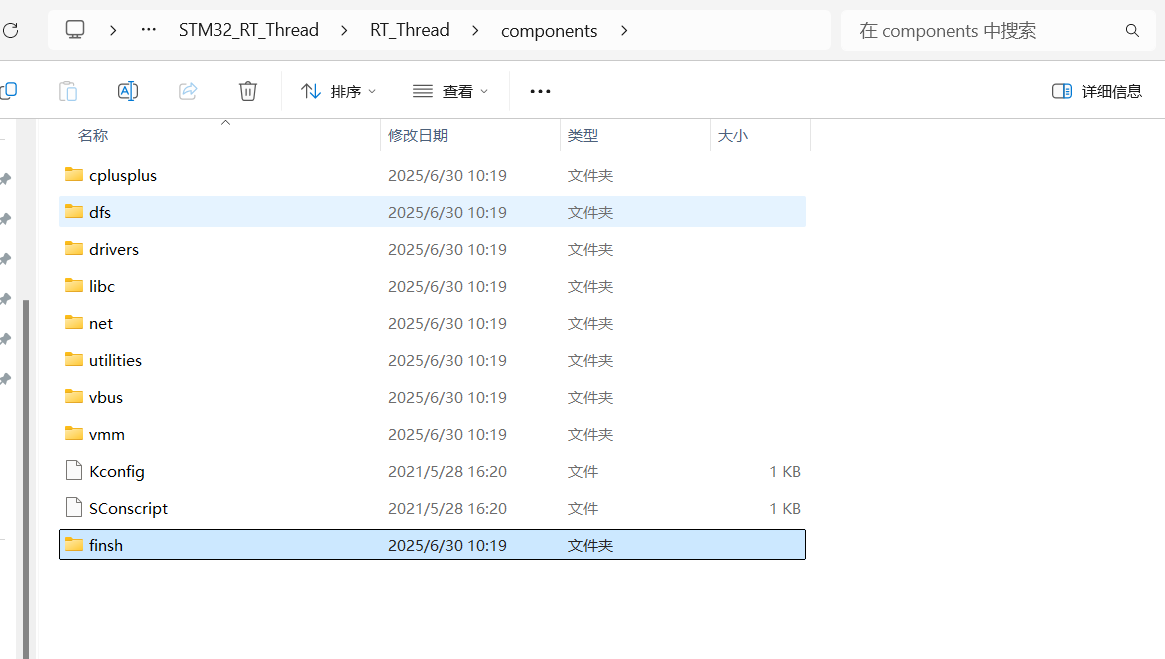
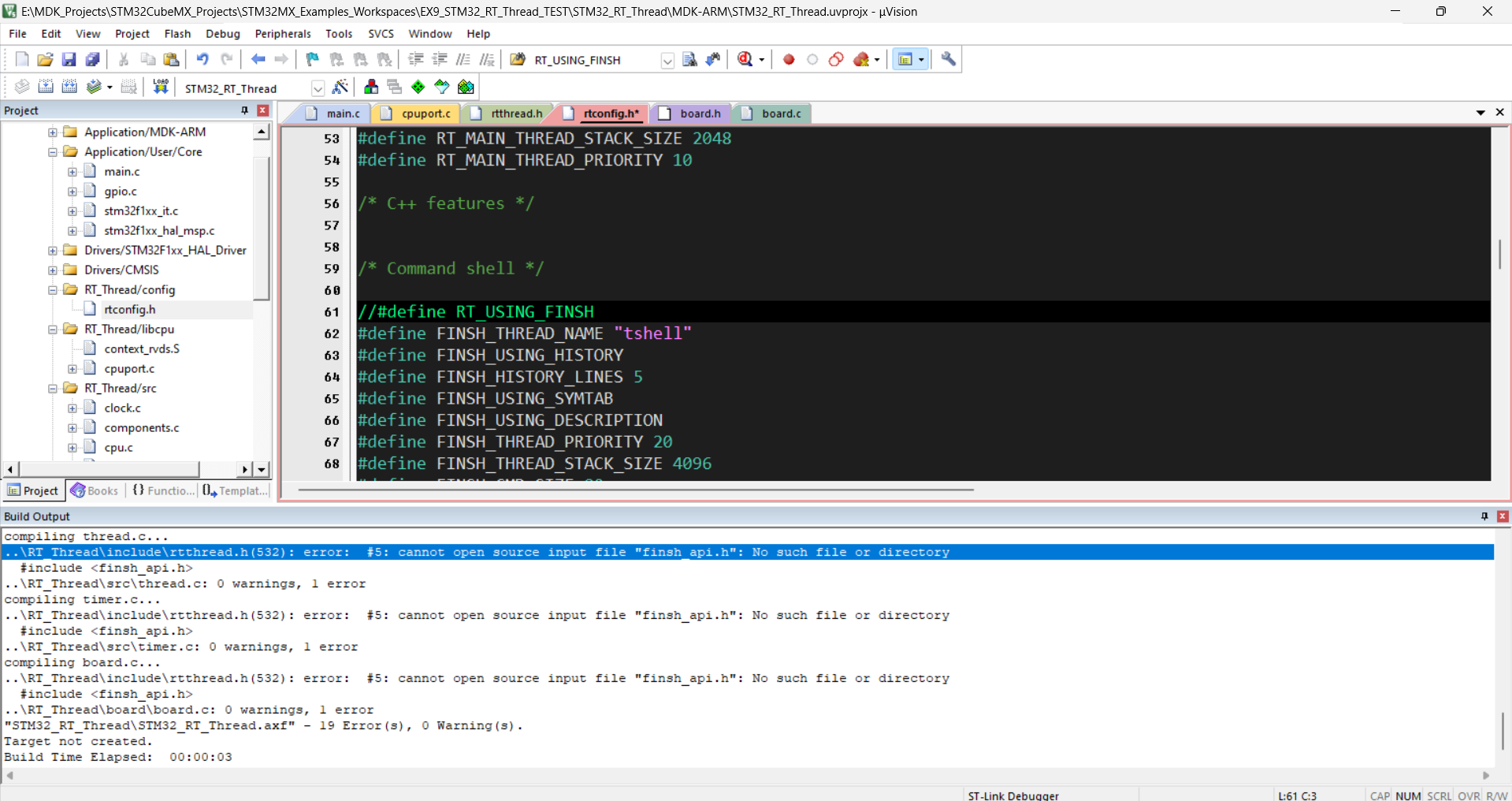
由于\STM32_RT_Thread\RT_Thread\components下的finsh需要注册串口设备,我们这里只移植精简版就把finsh组件删去
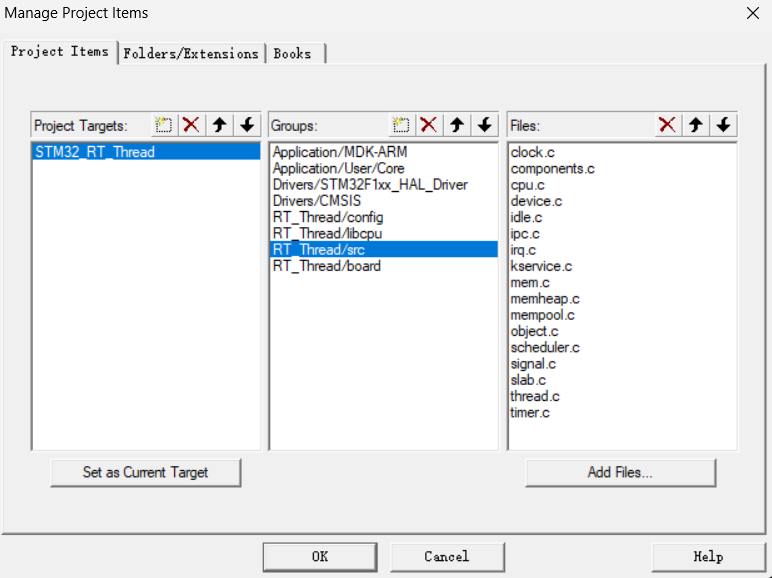
8.4个组对应添加文件
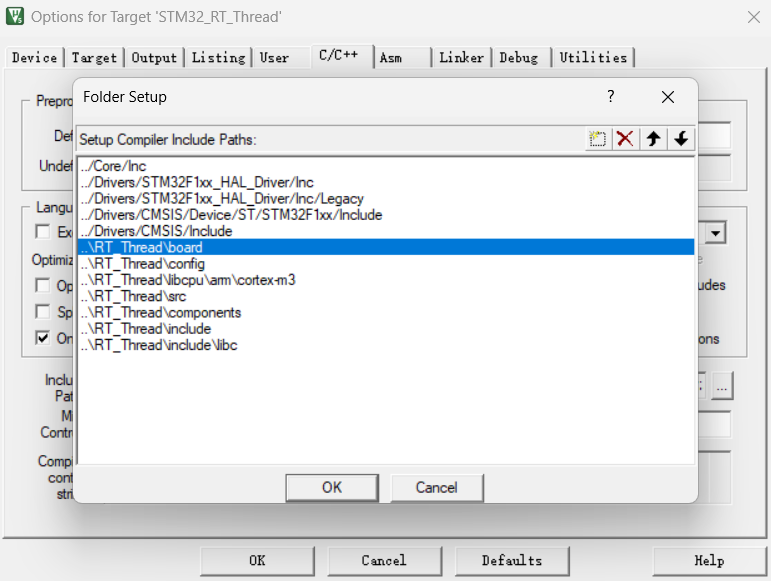
9.添加对应路径
10.注释掉#define RT_USING_FINSH,因为暂时不会用到finsh组件
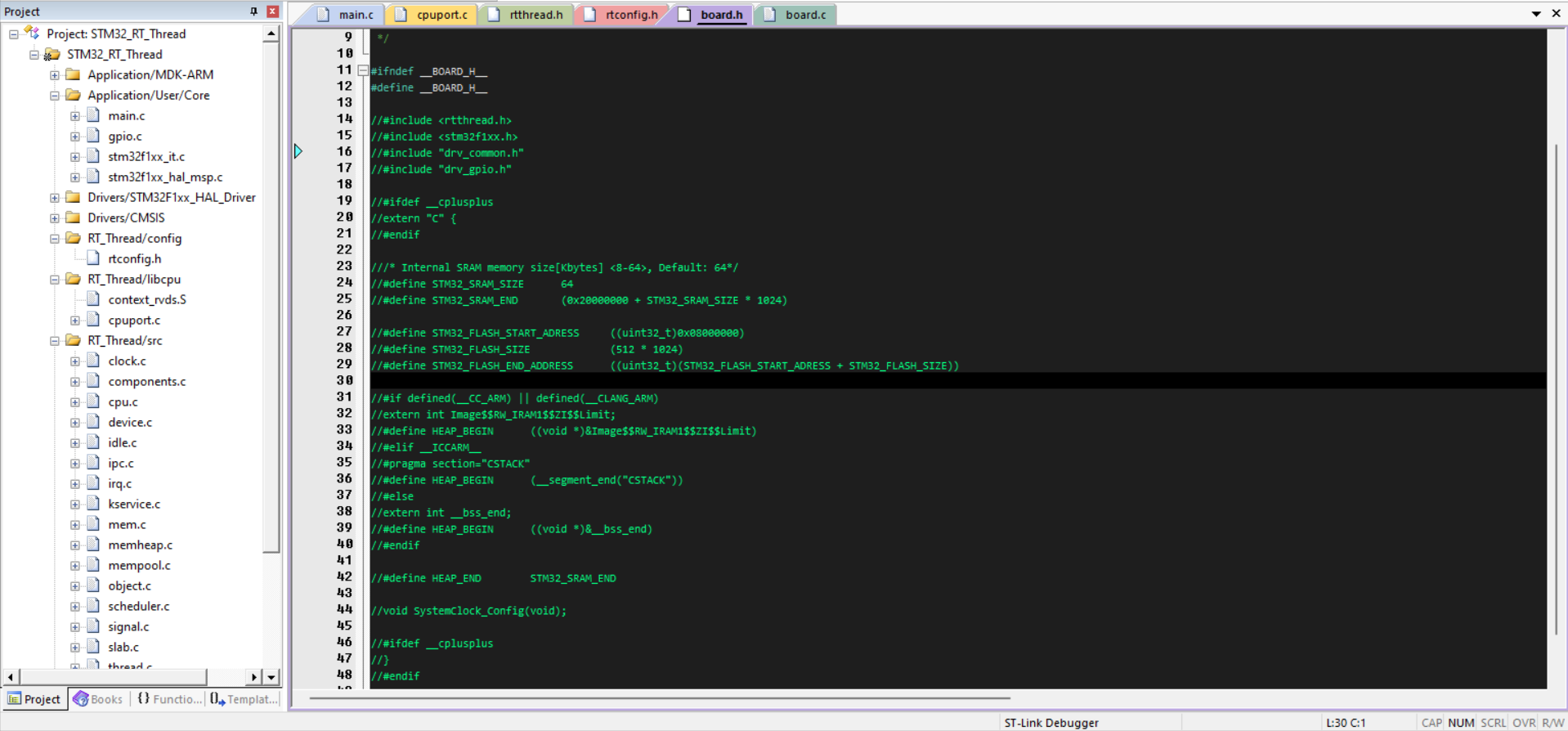
11.注释掉board.h的内容
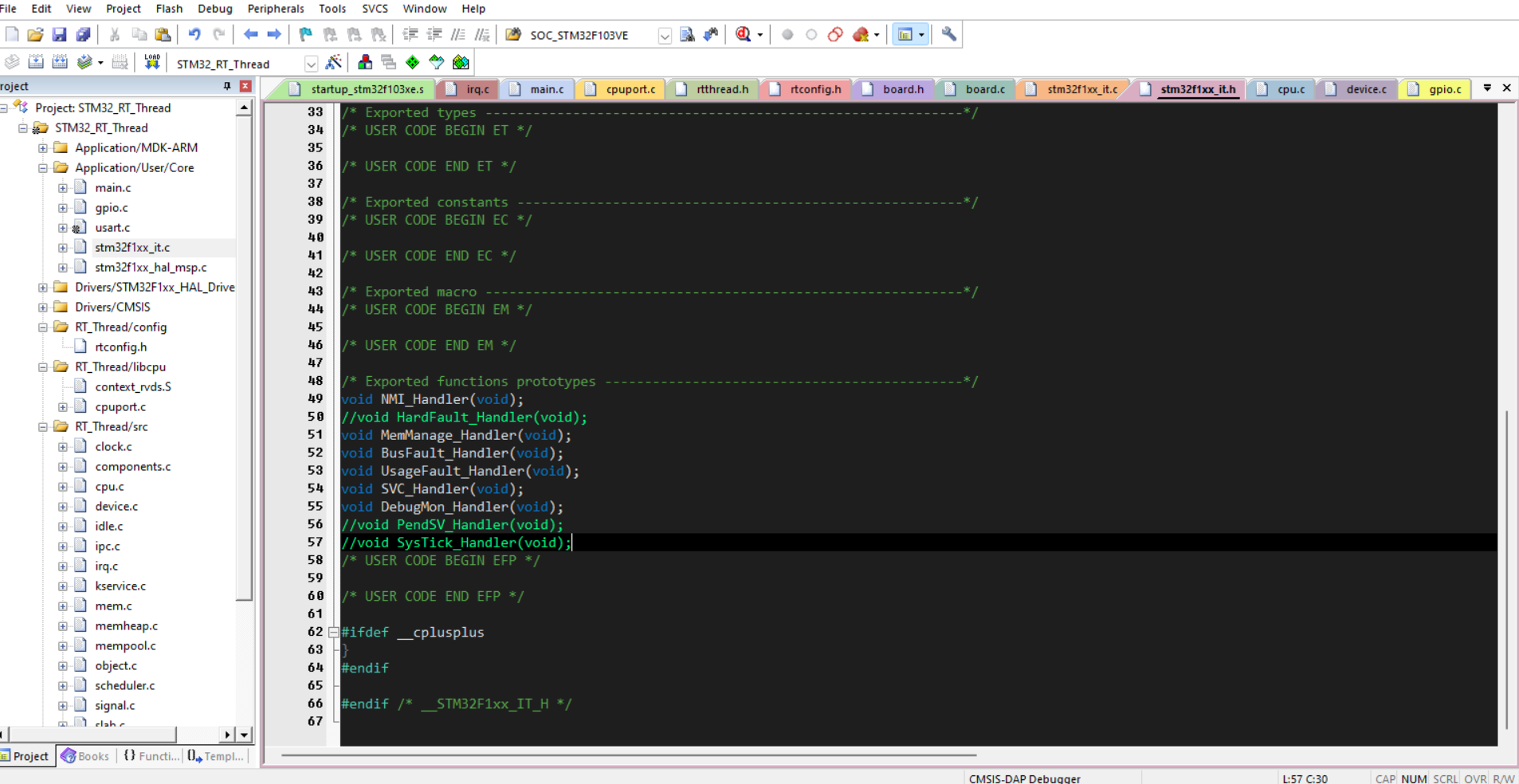
12.因为有重定义,则注释掉PendSV_Handler,SysTick_Handler, HardFault_Handler
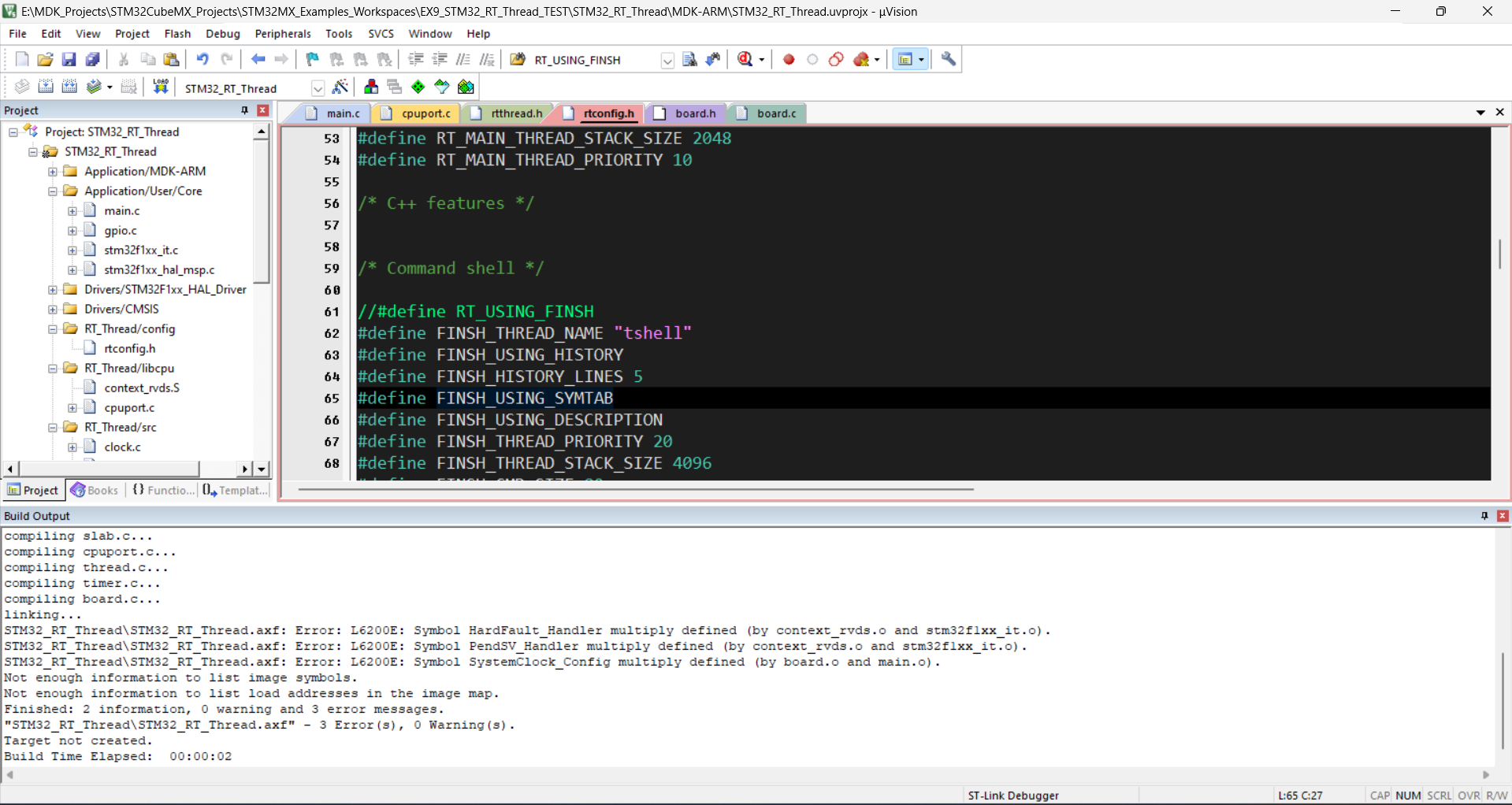
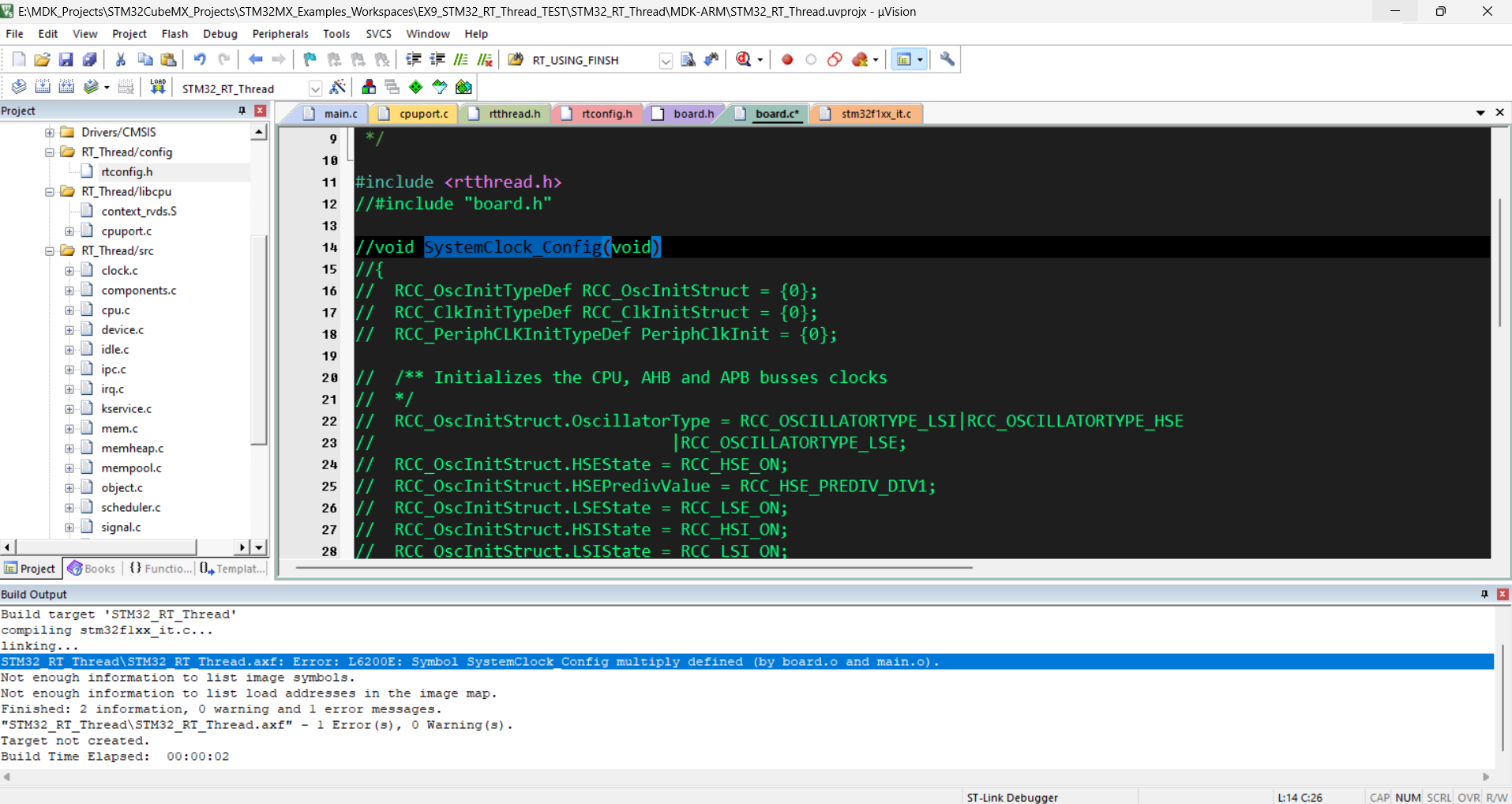
13.本来RT-Thread已经定义了void SystemClock_Config(void),这里注释掉board.c的SystemClock_Config,后面将使用CubeMX生成的SystemClock_Config
14.编写board.c,board. h
board.h
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2018-11-06 balanceTWK first version
*/
#ifndef __BOARD_H__
#define __BOARD_H__
//#include <rtthread.h>
//#include <stm32f1xx.h>
//#include "drv_common.h"
//#include "drv_gpio.h"
//#ifdef __cplusplus
//extern "C" {
//#endif
///* Internal SRAM memory size[Kbytes] <8-64>, Default: 64*/
//#define STM32_SRAM_SIZE 64
//#define STM32_SRAM_END (0x20000000 + STM32_SRAM_SIZE * 1024)
//#define STM32_FLASH_START_ADRESS ((uint32_t)0x08000000)
//#define STM32_FLASH_SIZE (512 * 1024)
//#define STM32_FLASH_END_ADDRESS ((uint32_t)(STM32_FLASH_START_ADRESS + STM32_FLASH_SIZE))
//#if defined(__CC_ARM) || defined(__CLANG_ARM)
//extern int Image$$RW_IRAM1$$ZI$$Limit;
//#define HEAP_BEGIN ((void *)&Image$$RW_IRAM1$$ZI$$Limit)
//#elif __ICCARM__
//#pragma section="CSTACK"
//#define HEAP_BEGIN (__segment_end("CSTACK"))
//#else
//extern int __bss_end;
//#define HEAP_BEGIN ((void *)&__bss_end)
//#endif
//#define HEAP_END STM32_SRAM_END
//void SystemClock_Config(void);
//#ifdef __cplusplus
//}
//#endif
#include "stm32f1xx_hal.h"
void rt_hw_board_init(void);
void SysTick_Handler(void);
#endif /* __BOARD_H__ */
board.c
#include "board.h"
#include <rthw.h>
#include <rtthread.h>
#include "main.h"
#include "gpio.h"
#include "stdio.h"
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
/*
* Please modify RT_HEAP_SIZE if you enable RT_USING_HEAP
* the RT_HEAP_SIZE max value = (sram size - ZI size), 1024 means 1024 bytes
*/
#define RT_HEAP_SIZE (15*1024)
static rt_uint8_t rt_heap[RT_HEAP_SIZE];
RT_WEAK void *rt_heap_begin_get(void)
{
return rt_heap;
}
RT_WEAK void *rt_heap_end_get(void)
{
return rt_heap + RT_HEAP_SIZE;
}
#endif
void rt_os_tick_callback(void)
{
rt_interrupt_enter();
rt_tick_increase();
rt_interrupt_leave();
}
/**
* This function will initial your board.
*/
void rt_hw_board_init(void)
{
/* 初始化 SysTick *///这一句是加入的
extern void SystemClock_Config(void);
SystemClock_Config();
//下面放置硬件初始化
MX_GPIO_Init();
//高电平关闭灯光,初始化关闭便于观察
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_SET);
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
#endif
}
#ifdef RT_USING_CONSOLE
static int uart_init(void)
{
//#error "TODO 2: Enable the hardware uart and config baudrate."
return 0;
}
INIT_BOARD_EXPORT(uart_init);
void rt_hw_console_output(const char *str)
{
//#error "TODO 3: Output the string 'str' through the uart."
}
#endif
void SysTick_Handler(void)
{
/* 进入中断 */
rt_interrupt_enter();
/* 更新时基 */
rt_tick_increase();
/* 离开中断 */
rt_interrupt_leave();
}
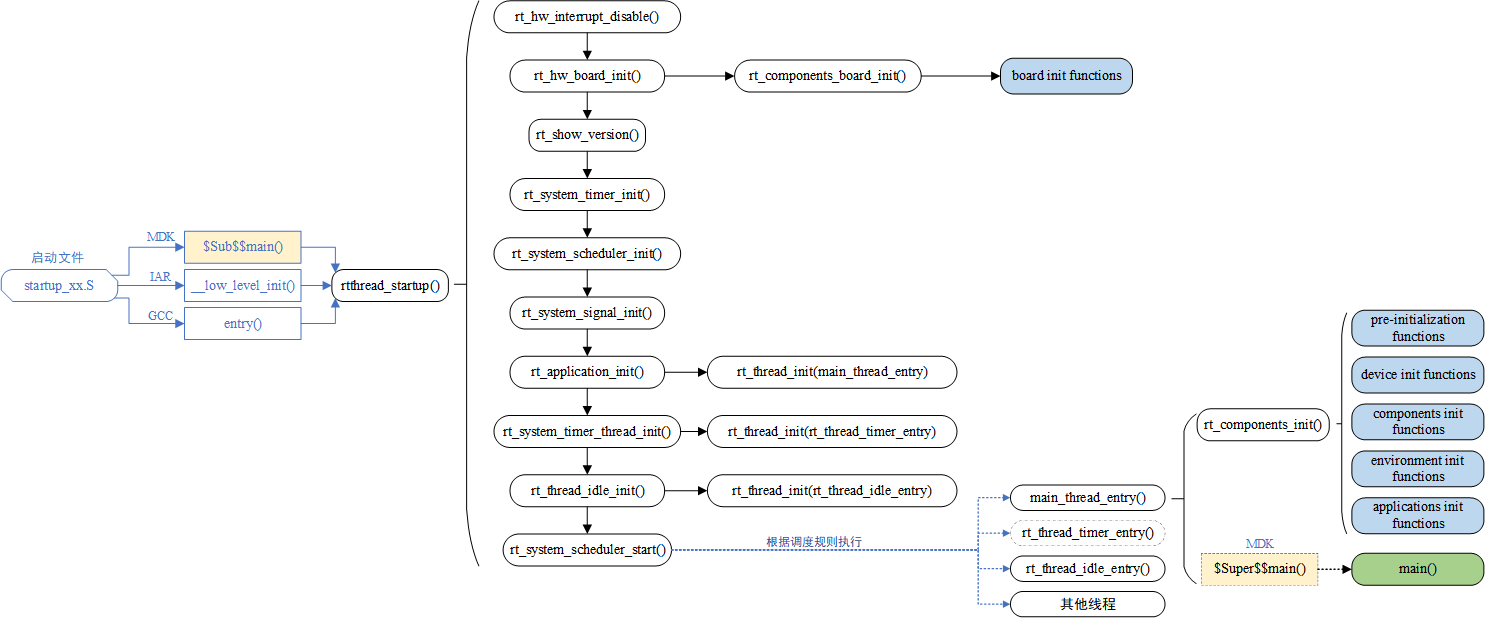
在board.c中将进行初始化,且看RT-Thread启动流程。
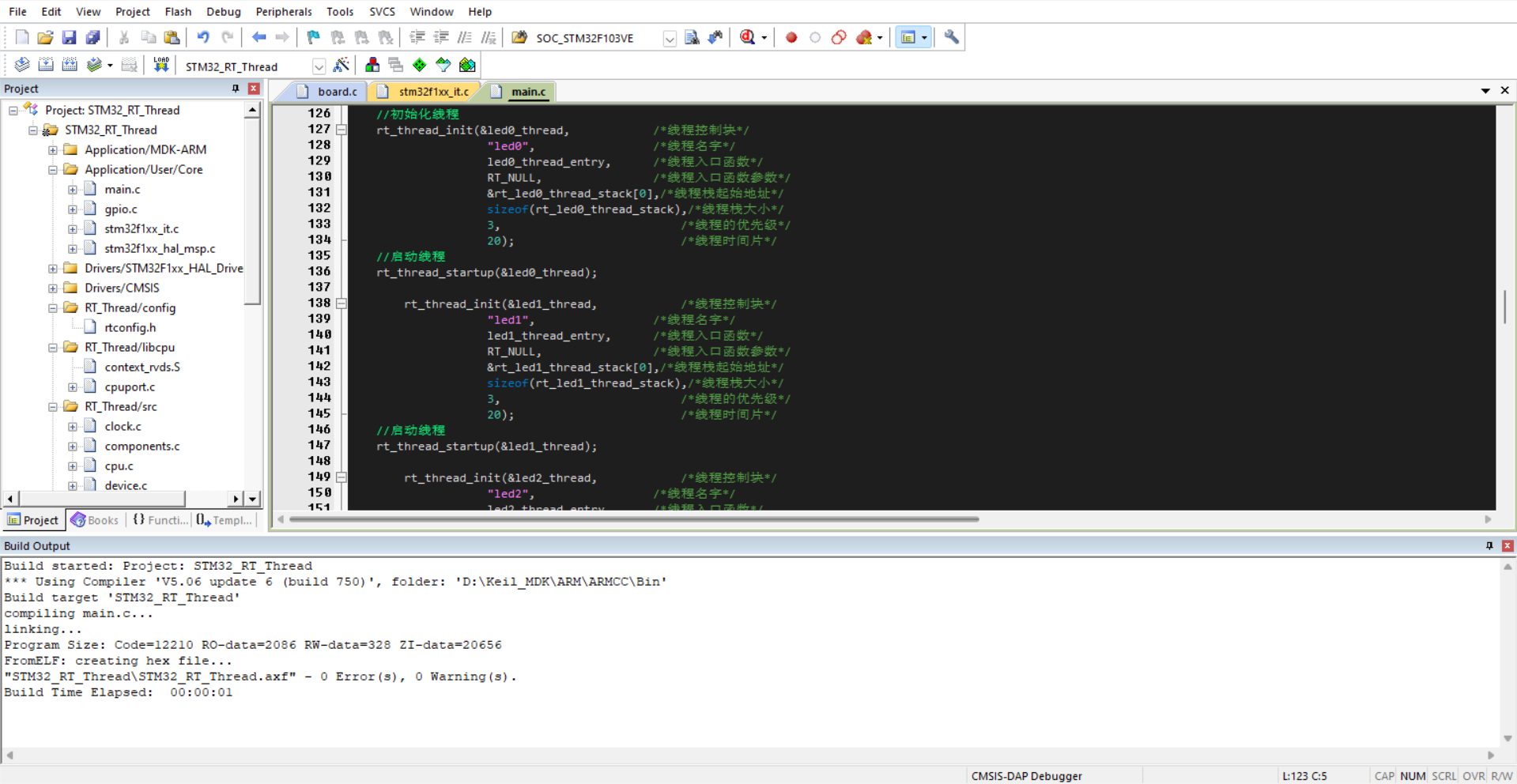
15.编写main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "board.h"
#include "rtthread.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/*定义线程控制块*/
static struct rt_thread led0_thread;
/* 定义线程控栈时要求 RT_ALIGN_SIZE 个字节对齐 */
ALIGN(RT_ALIGN_SIZE)
/* 定义线程栈 */
static rt_uint8_t rt_led0_thread_stack[1024];
/*定义线程控制块*/
static struct rt_thread led1_thread;
/* 定义线程控栈时要求 RT_ALIGN_SIZE 个字节对齐 */
ALIGN(RT_ALIGN_SIZE)
/* 定义线程栈 */
static rt_uint8_t rt_led1_thread_stack[1024];
/*定义线程控制块*/
static struct rt_thread led2_thread;
/* 定义线程控栈时要求 RT_ALIGN_SIZE 个字节对齐 */
ALIGN(RT_ALIGN_SIZE)
/* 定义线程栈 */
static rt_uint8_t rt_led2_thread_stack[1024];
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
//声明线程函数
static void led0_thread_entry(void* parameter);
static void led1_thread_entry(void* parameter);
static void led2_thread_entry(void* parameter);
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/*
* 开发板硬件初始化,RTT 系统初始化已经在 main 函数之前完成,
* 即在 component.c 文件中的 rtthread_startup()函数中完成了。
* 所以在 main 函数中,只需要创建线程和启动线程即可。
*/
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
// HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
// SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
// MX_GPIO_Init();
/* USER CODE BEGIN 2 */
//初始化线程
rt_thread_init(&led0_thread, /*线程控制块*/
"led0", /*线程名字*/
led0_thread_entry, /*线程入口函数*/
RT_NULL, /*线程入口函数参数*/
&rt_led0_thread_stack[0],/*线程栈起始地址*/
sizeof(rt_led0_thread_stack),/*线程栈大小*/
3, /*线程的优先级*/
20); /*线程时间片*/
//启动线程
rt_thread_startup(&led0_thread);
rt_thread_init(&led1_thread, /*线程控制块*/
"led1", /*线程名字*/
led1_thread_entry, /*线程入口函数*/
RT_NULL, /*线程入口函数参数*/
&rt_led1_thread_stack[0],/*线程栈起始地址*/
sizeof(rt_led1_thread_stack),/*线程栈大小*/
3, /*线程的优先级*/
20); /*线程时间片*/
//启动线程
rt_thread_startup(&led1_thread);
rt_thread_init(&led2_thread, /*线程控制块*/
"led2", /*线程名字*/
led2_thread_entry, /*线程入口函数*/
RT_NULL, /*线程入口函数参数*/
&rt_led2_thread_stack[0],/*线程栈起始地址*/
sizeof(rt_led2_thread_stack),/*线程栈大小*/
3, /*线程的优先级*/
20); /*线程时间片*/
//启动线程
rt_thread_startup(&led2_thread);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
//定义线程函数
static void led0_thread_entry(void* parameter)
{
while(1)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_0);
rt_thread_delay(400);/* 延时 400 个 tick */
}
}
//定义线程函数
static void led1_thread_entry(void* parameter)
{
while(1)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_1);
rt_thread_delay(600);/* 延时 600 个 tick */
}
}
//定义线程函数
static void led2_thread_entry(void* parameter)
{
while(1)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_5);
rt_thread_delay(800);/* 延时 800 个 tick */
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
至此,纯手动移植完成,后续会讲如何使用KEIL自带源码包移植RT-Thread和RT-Thread Studio的使用。
四、实验效果
移植成功项目示例链接:


 浙公网安备 33010602011771号
浙公网安备 33010602011771号