2020-2021-1 20209322《Linux内核原理与分析》第三周作业
本周学习了函数调用堆栈的基本原理,学习了C语言中内嵌汇编的使用方法,最后借助实验楼的平台在mykernel的基础上构造了一个简单的操作系统内核。
一、函数调用堆栈
1.计算机的三大法宝
存储程序计算机、函数调用堆栈、中断
2.堆栈的作用
记录函数调用框架、传递函数参数、保存返回值的地址、提供函数内部局部变量的存储空间
3.堆栈传递函数参数
通过堆栈传递参数的方法时从右到左依次进栈、程序使用EAX寄存器来保存返回值
二、内嵌汇编的基本语法
1.语法
asm volatile(
汇编语句:
输出部分:
输入部分:
破坏描述部分
)
asm是内嵌汇编的关键字,volatile表示让汇编指令保持原样
2.%转义字符
寄存器前是%%,两个%,而%加上一个数字就表示在输出部分、输入部分以及破坏描述部分的编号。按照顺序依次1,2,3...
3.代码与对应的寄存器

三、实验代码
1.mypcb.h
#define MAX_TASK_NUM 4
#define KERNEL_STACK_SIZE 1024*2
/* CPU-specific state of this task */
struct Thread {
unsigned long ip;
unsigned long sp;
};
typedef struct PCB{
int pid;
volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */
unsigned long stack[KERNEL_STACK_SIZE];
/* CPU-specific state of this task */
struct Thread thread;
unsigned long task_entry;
struct PCB *next;
}tPCB;
void my_schedule(void);
2.mymain.c
#include <linux/types.h>
#include <linux/module.h>
#include <linux/proc_fs.h>
#include <linux/kernel.h>
#include <linux/syscalls.h>
#include <linux/stackprotector.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/delay.h>
#include <linux/ioport.h>
#include <linux/init.h>
#include <linux/initrd.h>
#include <linux/bootmem.h>
#include <linux/acpi.h>
#include <linux/tty.h>
#include <linux/percpu.h>
#include <linux/kmod.h>
#include <linux/vmalloc.h>
#include <linux/kernel_stat.h>
#include <linux/start_kernel.h>
#include <linux/security.h>
#include <linux/smp.h>
#include <linux/profile.h>
#include <linux/rcupdate.h>
#include <linux/moduleparam.h>
#include <linux/kallsyms.h>
#include <linux/writeback.h>
#include <linux/cpu.h>
#include <linux/cpuset.h>
#include <linux/cgroup.h>
#include <linux/efi.h>
#include <linux/tick.h>
#include <linux/interrupt.h>
#include <linux/taskstats_kern.h>
#include <linux/delayacct.h>
#include <linux/unistd.h>
#include <linux/rmap.h>
#include <linux/mempolicy.h>
#include <linux/key.h>
#include <linux/buffer_head.h>
#include <linux/page_cgroup.h>
#include <linux/debug_locks.h>
#include <linux/debugobjects.h>
#include <linux/lockdep.h>
#include <linux/kmemleak.h>
#include <linux/pid_namespace.h>
#include <linux/device.h>
#include <linux/kthread.h>
#include <linux/sched.h>
#include <linux/signal.h>
#include <linux/idr.h>
#include <linux/kgdb.h>
#include <linux/ftrace.h>
#include <linux/async.h>
#include <linux/kmemcheck.h>
#include <linux/sfi.h>
#include <linux/shmem_fs.h>
#include <linux/slab.h>
#include <linux/perf_event.h>
#include <linux/file.h>
#include <linux/ptrace.h>
#include <linux/blkdev.h>
#include <linux/elevator.h>
#include <asm/io.h>
#include <asm/bugs.h>
#include <asm/setup.h>
#include <asm/sections.h>
#include <asm/cacheflush.h>
#ifdef CONFIG_X86_LOCAL_APIC
#include <asm/smp.h>
#endif
#include <linux/types.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
tPCB task[MAX_TASK_NUM];
tPCB * my_current_task = NULL;
volatile int my_need_sched = 0;
void my_process(void);
void __init my_start_kernel(void)
{
int pid = 0;
int i;
/* 初始化进程 状态为0*/
task[pid].pid = pid;
task[pid].state = 0; /* -1 unrunnable, 0 runnable, >0 stopped */
task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process;
task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1];
task[pid].next = &task[pid];
/*fork more process */
for(i=1;i<MAX_TASK_NUM;i++)
{
memcpy(&task[i],&task[0],sizeof(tPCB));
task[i].pid = i;
task[i].thread.sp = (unsigned long)(&task[i].stack[KERNEL_STACK_SIZE-1]);
task[i].next = task[i-1].next;
task[i-1].next = &task[i];
}
/* start process 0 by task[0] */
pid = 0;
my_current_task = &task[pid];
asm volatile(
"movl %1,%%esp\n\t" /* set task[pid].thread.sp to rsp */
"pushl %1\n\t" /* push rbp */
"pushl %0\n\t" /* push task[pid].thread.ip */
"ret\n\t" /* pop task[pid].thread.ip to rip */
:
: "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) /* input c or d mean %ecx/%edx*/
);
}
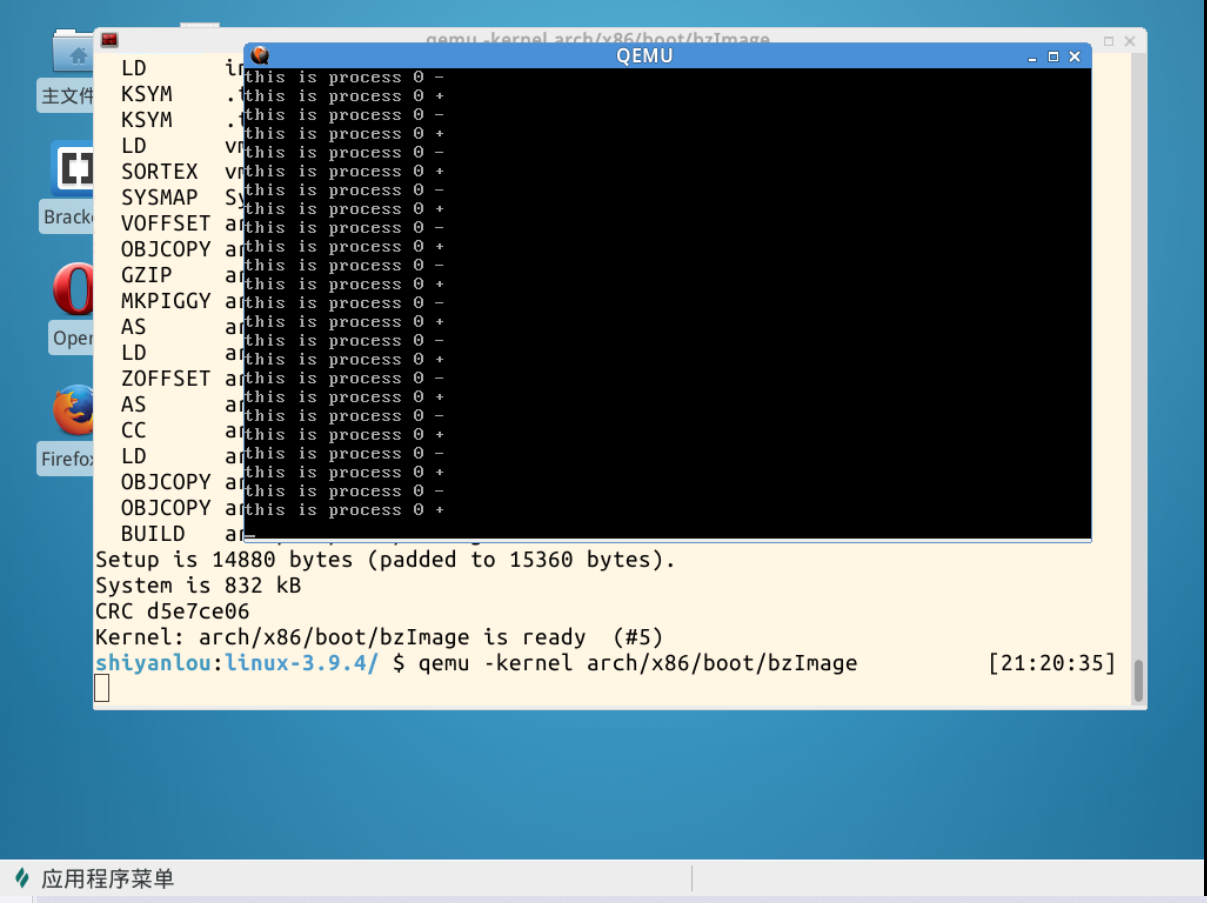
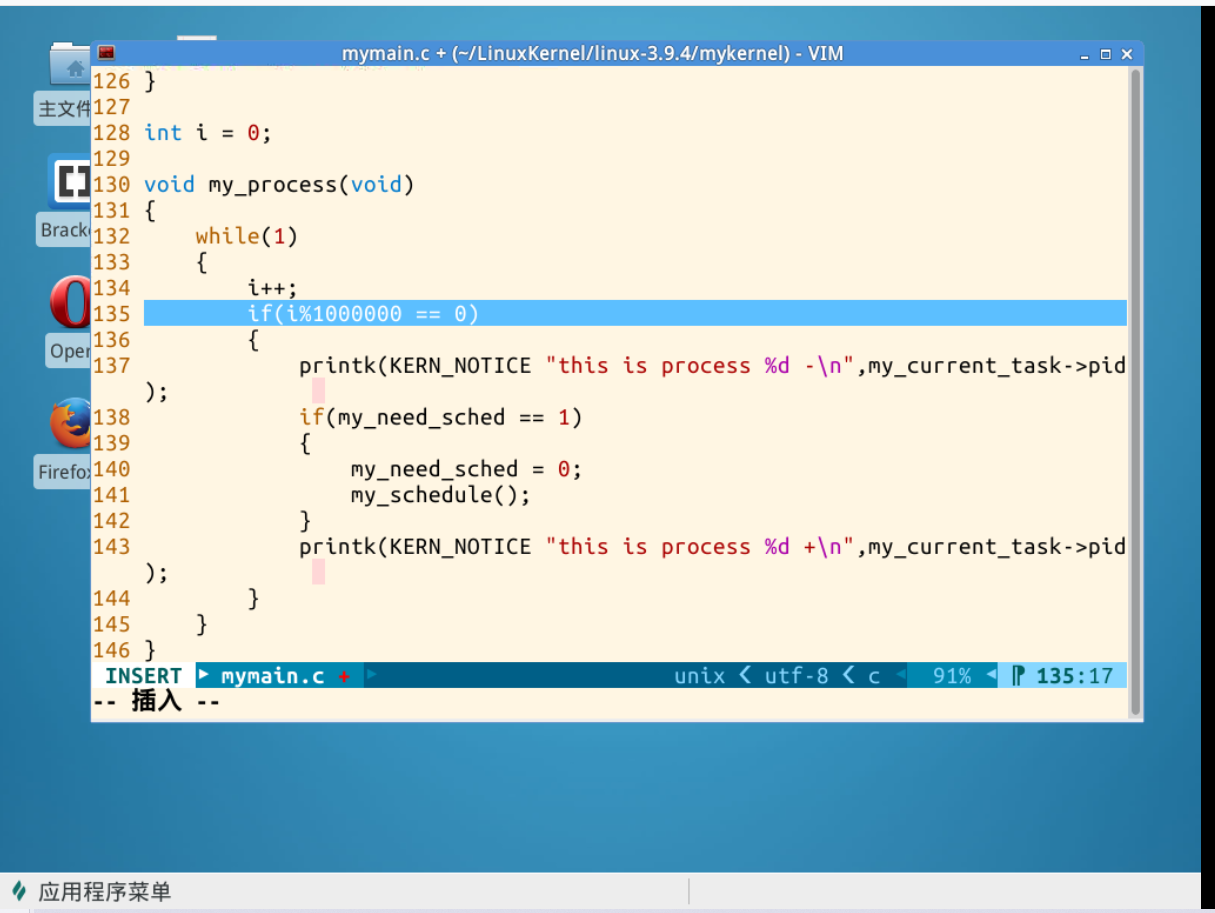
int i = 0;
void my_process(void)
{
while(1)
{
i++;
if(i%10000000 == 0)
{
printk(KERN_NOTICE "this is process %d -\n",my_current_task->pid);
if(my_need_sched == 1)
{
my_need_sched = 0;
my_schedule();
}
printk(KERN_NOTICE "this is process %d +\n",my_current_task->pid);
}
}
}
3.myinterrupt.c
#include <linux/kernel_stat.h>
#include <linux/export.h>
#include <linux/interrupt.h>
#include <linux/percpu.h>
#include <linux/init.h>
#include <linux/mm.h>
#include <linux/swap.h>
#include <linux/pid_namespace.h>
#include <linux/notifier.h>
#include <linux/thread_info.h>
#include <linux/time.h>
#include <linux/jiffies.h>
#include <linux/posix-timers.h>
#include <linux/cpu.h>
#include <linux/syscalls.h>
#include <linux/delay.h>
#include <linux/tick.h>
#include <linux/kallsyms.h>
#include <linux/irq_work.h>
#include <linux/sched.h>
#include <linux/sched/sysctl.h>
#include <linux/slab.h>
#include <asm/uaccess.h>
#include <asm/unistd.h>
#include <asm/div64.h>
#include <asm/timex.h>
#include <asm/io.h>
#define CREATE_TRACE_POINTS
#include <trace/events/timer.h>
/*
* Called by timer interrupt.
*/
#include "mypcb.h"
extern tPCB task[MAX_TASK_NUM];
extern tPCB * my_current_task;
extern volatile int my_need_sched;
volatile int time_count = 0;
void my_timer_handler(void)
{
if(time_count%1000 == 0 && my_need_sched != 1)
{
printk(KERN_NOTICE ">>>my_timer_handler here<<<\n");
my_need_sched = 1;
}
time_count ++ ;
return;
}
void my_schedule(void)
{
tPCB * next;
tPCB * prev;
if(my_current_task == NULL
|| my_current_task->next == NULL)
{
return;
}
printk(KERN_NOTICE ">>>my_schedule<<<\n");
/* schedule */
next = my_current_task->next;
prev = my_current_task;
if(next->state == 0)/* -1 unrunnable, 0 runnable, >0 stopped */
{
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
/* switch to next process */
asm volatile(
"pushl %%ebp\n\t" /* save rbp of prev */
"movl %%esp,%0\n\t" /* save rsp of prev */
"movl %2,%%esp\n\t" /* restore rsp of next */
"movl $1f,%1\n\t" /* save rip of prev */
"pushl %3\n\t"
"ret\n\t" /* restore rip of next */
"1:\t" /* next process start here */
"popl %%ebp\n\t"
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
return;
}
4.问题
按照github上的代码,出现了如下的问题:
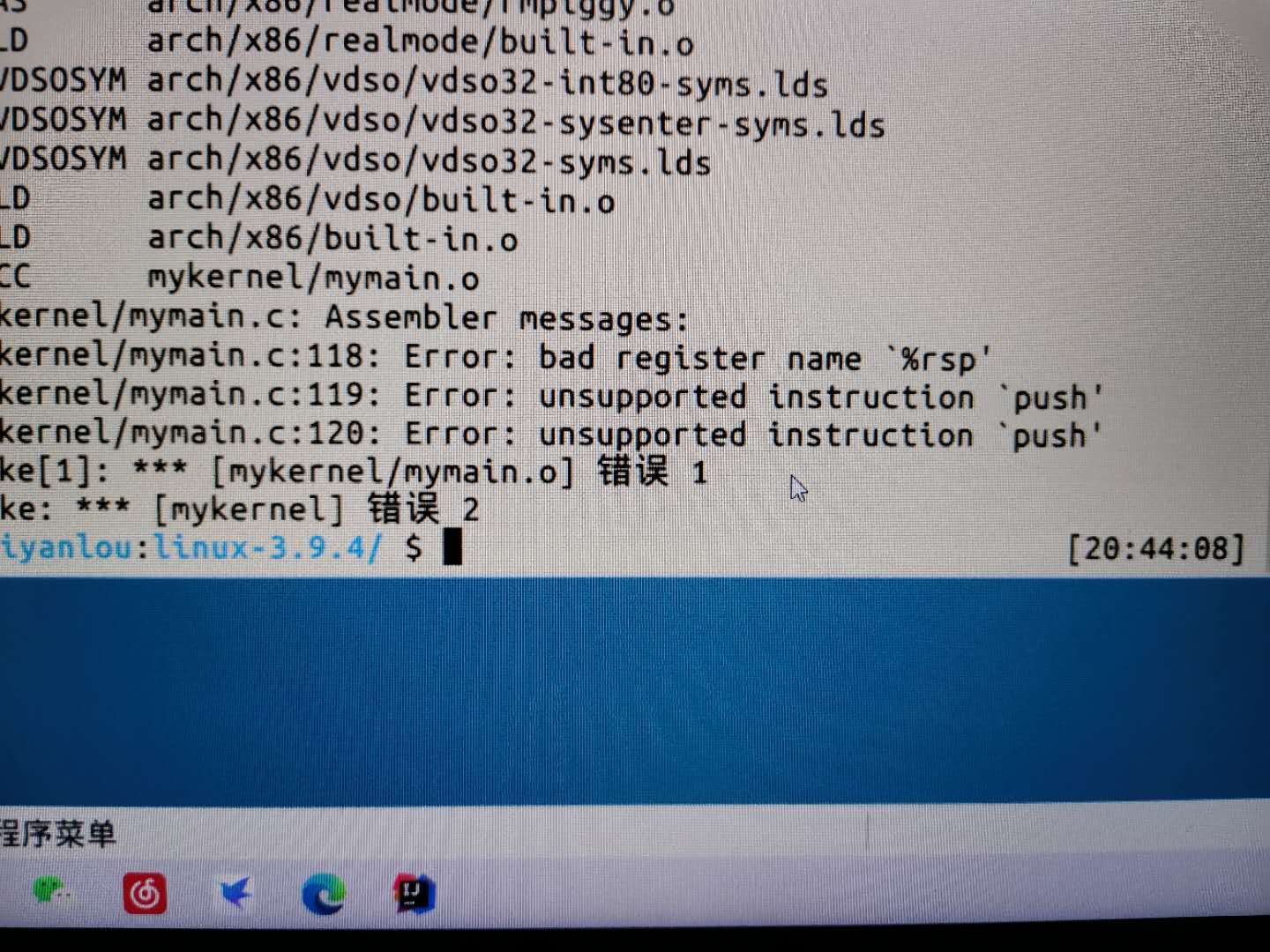
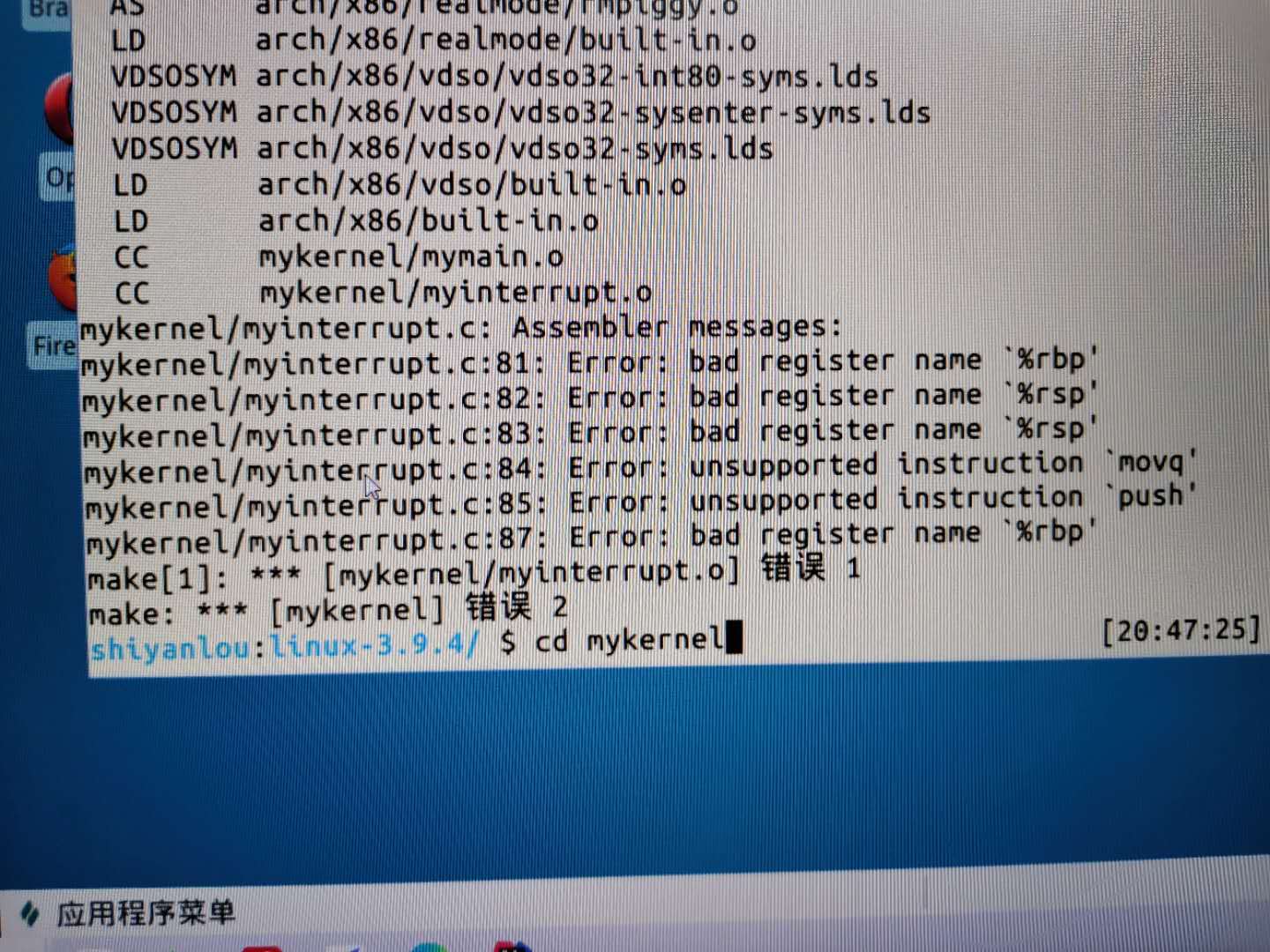
在x86中只有8个32位通用寄存器,eax,ebx,ecx,edx, ebp, esp, esi, edi,
在X86-64中,所有寄存器都是64位,相对32位的x86来说,标识符发生了变化,比如:从原来的%ebp变成了%rbp。为了向后兼容性,%ebp依然可以使用,不过指向了%rbp的低32位。
X86-64寄存器的变化,不仅体现在位数上,更加体现在寄存器数量上。新增加寄存器%r8到%r15。加上x86的原有8个,一共16个寄存器。
分别是:%rax,%rbx,%rcx,%rdx,%esi,%edi,%rbp,%rsp,%r8,%r9,%r10,%r11,%r12,%r13,%r14,%r15。其中:
%rax 作为函数返回值使用。
%rsp 栈指针寄存器,指向栈顶
%rdi,%rsi,%rdx,%rcx,%r8,%r9 用作函数参数,依次对应第1参数,第2参数。。。
%rbx,%rbp,%r12,%r13,%14,%15 用作数据存储,遵循被调用者使用规则,简单说就是随便用,调用子函数之前要备份它,以防他被修改
%r10,%r11 用作数据存储,遵循调用者使用规则,简单说就是使用之前要先保存原值
参考:http://blog.chinaunix.net/uid-21501855-id-5827998.html;https://blog.csdn.net/dayancn/article/details/51328959

 浙公网安备 33010602011771号
浙公网安备 33010602011771号