【总结】斜率优化
这或许是这几天的济南云斗集训之旅最大的收获吧,若是最后一天的模拟赛文件不会交错也许结局会更好,但在这残酷的现实中却从不会有“如果”一词。
本文将效仿《李煜东算法进阶指南》的思路,按照例题层层深入。
P2365 任务安排
凡是先考虑朴素算法,这是一个好习惯。
朴素的解法
求出 \(T,C\) 的前缀 \(t,c\),设 \(f_{i,j}\) 为把前 \(i\) 个任务分为 \(j\) 批的最小费用,明显的是第 \(j\) 批任务完成的时间为第 \(j\times S+t_i\) 时刻。
朴素的解法复杂度 \(O(n^3)\)。
本题正解
思考为什么要 \(j\) 这一维,发现 \(j\) 这一维完全是为了求当前这一批完成的时刻。
思考该如何优化,感觉不容易直接求之前此机器启动过几次,但机器每次启动所耗费的时间 \(S\) 最终会累积到之后所有任务完成时间上。所以我们可以将其累加到费用当中。
设 \(f_i\) 表示把前 \(i\) 个任务分成若干批执行的最小费用,状态转移方程为:
下文摘自《李煜东算法进阶指南》:
也就是说我们没有直接求出每批的完成时刻,而是在一批任务“开始”对后续任务产生影响时,就先把费用累加到答案中。这是一种名为“费用前提计算”的经典思想。
很明显这段话可谓相当的晦涩。
该复杂度 \(O(N^2)\)。
咦,好尴尬,我似乎没有写过关于此解的的代码。
P10979 任务安排 2
与上一题的题意一模一样,但数据加强了。
将上一题的转化方程拆一下,得:
由于 \(f_i\) 的大小只与跟 \(j\) 有关的项有关,其他项都是固定的,可以当作常数,然后再合并同类项,于是得:
让我们把 \(min\) 函数去掉,然后将全部不与 \(j\) 有关的项作为常数项(包括 \(f_i\)),将与 \(j\) 有关的项当作变量,组成一个函数式:
在一个以 \(c_j\) 为横坐标(\(x\)),\(f_j\) 为纵坐标(\(y\))的平面直角坐标系当中,这是一条以 \(S+t_i\) 为斜率(\(k\)),以 \(f_i-c_i\times t_i-S\times c_n\) 为截距(\(b\))的直线(\(y=kx+b\))。因此每一个候选的决策都是一个坐标系中的点,即每一个 \(j\) 都对应着一个点 \((c_j,f_j)\),而我们要求的 \(f_i\) 对应每一个点对应直线的截距,每个直线的斜率是固定的,而截距是未知的。综上所述,当截距最小时,\(f_i\) 也最小。
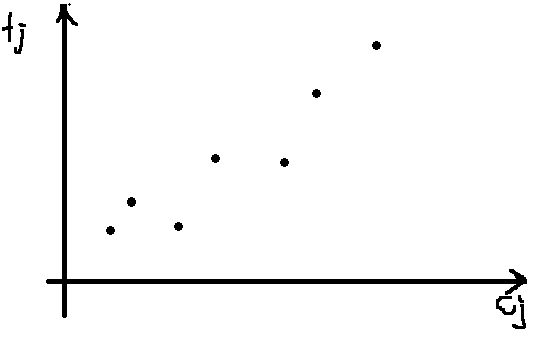
对于三个决策点 \((c_{j_1},f_{j_1})\),\((c_{j_2},f_{j_2})\),\((c_{j_3},f_{j_3})\),设 \(j_1<j_2<j_3\),因为 \(T,C\) 都是正整数所以 \(t\) 和 \(c\) 都有单调性。
探究什么情况时,\(j_2\) 有可能是最优决策:
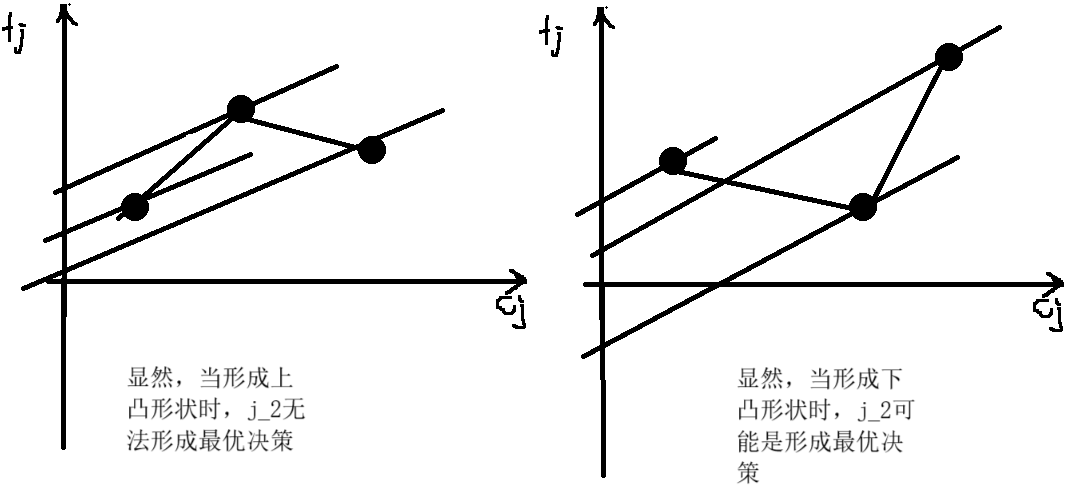
如上图所示,\(j_2\) 有可能是最优决策,当且仅当:
上示的不等式实际上是连接两个决策点连线的斜率,通俗的讲,我们应该维护“链接相邻两点的线段斜率”单调递增的一个“下凸壳”,只有这个下凸壳的顶点才有可能成为最优决策。实际上,对于一条斜率为 \(k\) 的直线,若某个点的左侧线段比 \(k\) 小、右侧线段的斜率比 \(k\) 大,则该顶点就是最优决策。换言之,如果把这条直线和所有线段组成一个排列组成一个序列,那么令结局最小化的定点就出现在按照斜率大小排序时,直线应该排在的位置上。
在本题中,\(j\) 的范围是 \(0\le j<i\),随着 \(i\) 的增大 ,都会有一个新决策出现。因为 \(c\) 的单调性,新决策的单调性一定会大于之前所有决策点的单调性。由于 \(t\) 的单调性,每次的斜率 \(S+t_i\) 也单调递增,如果每次只保留“相邻两点的线段斜率”大于 \(S+t_i\) 的部分,那凸壳的最左端点就一定是最优决策。
综上,对于代码操作,我们建立一个单调队列 \(q\),维护这个下凸壳。
对于每个决策 \(i\):
-
检查队头决策 \(q_l\) 和 \(q_{l+1}\),若斜率 $(f_{q_{l+1}}-f_{q_l})/(c_{q_{l+1}}-c_{q_l})\le S+t_i $,则 \(q_l\) 出队,检查新对头。
-
取队头 \(q_l\) 为最优决策,计算 \(f_i\)。
-
将新决策 \(i\) 队尾插入 ,插入前,若 \(q_r\) 不满足下凸性,即 \(q_r\) 是无用决策,就将 \(q_r\) 出队,检查新队尾。
时间复杂度 \(O(n)\)。
代码:
#include<bits/stdc++.h>
using namespace std;
const int N=3e5+5;
int n,s,c[N],t[N],f[N],q[N];
int main(){
cin>>n>>s;
for(int i=1;i<=n;i++){
cin>>t[i]>>c[i];
t[i]+=t[i-1],c[i]+=c[i-1];
}
int l=1,r=1;
memset(f,0x3f,sizeof(f));
f[0]=0;
q[1]=0;
for(int i=1;i<=n;i++){
int k = s+t[i] ;
while( l<r && f[q[l+1]]-f[q[l]] <= k * (c[q[l+1]]-c[q[l]]) ) ++l;
f[i]= f[q[l]] - k*c[q[l]] + t[i]*c[i] + s*c[n];
while( l<r && (f[q[r]]-f[q[r-1]]) * (c[i]-c[q[r]])>=(c[q[r]]-c[q[r-1]])*(f[i]-f[q[r]]))--r;
q[++r]=i;
}
cout<<f[n];
return 0;
}
以下摘自《李煜东算法进阶指南》:
与一般的单调队列优化 DP 的模型相比,本题维护的“单调性”依赖于队列中相邻的两个元素之间的某种“比值”。因为这个值对应线性规划的坐标系的斜率,所以我们把本题中使用的优化方法称为“斜率优化”,英文称为 convex hull trikk(直译为凸包优化策略)。
P5785 [SDOI2012] 任务安排
与上一题不同的是这一题的 \(T\) 可能是负数,即 \(t\) 不具有单调性,所以本题的斜率 \(S+t_i\) 并不具有单调性,所以上文的操作 1 无法进行,所以我们需要维护整个凸壳。
于是我们需要在单调队列中寻找一个点 \(p\),\(p\) 的左侧线段的斜率小于 \(S+t_i\),右侧线段的斜率大于 \(S+t_i\)。
对于这个搜索,我们可以二分搜索。
#include<bits/stdc++.h>
#define int long long
using namespace std;
const int N=3e5+5;
int n,s,c[N],t[N],f[N],q[N],l,r,k;
int binary_search(int i){
if(l==r)return q[l];
int L=l,R=r;
while(L<R){
int mid=(L+R)>>1;
if(f[q[mid+1]]-f[q[mid]]<=k*(c[q[mid+1]]-c[q[mid]]))L=mid+1;
else R=mid;
}
return q[L];
}
signed main(){
cin>>n>>s;
for(int i=1;i<=n;i++){
cin>>t[i]>>c[i];
t[i]+=t[i-1],c[i]+=c[i-1];
}
l=r=1,q[1]=0;
for(int i=1;i<=n;i++){
k=s+t[i];
int p=binary_search(i);
f[i]=f[p]-k*c[p] + t[i]*c[i] + s*c[n];
while( l<r && (f[q[r]]-f[q[r-1]]) * (c[i]-c[q[r]])>=(c[q[r]]-c[q[r-1]])*(f[i]-f[q[r]]))r--;
q[++r]=i;
}
cout<<f[n];
return 0;
}
P10980 任务安排 4.1【暂无数据】
若 \(C\) 是负数,则 \(c\) 不具有单调性,可以倒序 DP,设计一个状态转移,让 \(t\) 为横坐标,\(c\) 是斜率中的一项。仍然可以单调队列维护凸壳,用二分法求出最佳解法。
P10981 任务安排 4.2【暂无数据】
\(T,C\) 都有可能是负数,二者都不具有单调性,意味着需要动态开点、动态查询。
需要平衡树维护。
CF311B Cats Transport
呵呵,任务安排系列就此完成了。
呃呃额,感觉前面写的够多了,这道题只要知道他跟任务安排2是类似的即可。
#include<bits/stdc++.h>
using namespace std;
#define int long long
const int N=1e5+5;
int n,p,d[N],t[N],h[N],m,a[N],s[N],f[105][N],q[N];
int qy(int i,int L){
return f[i-1][q[L]]+s[q[L]];
}
signed main(){
cin>>n>>m>>p;
for(int i=2;i<=n;i++){cin>>d[i];d[i]+=d[i-1];}
for(int i=1;i<=m;i++){
cin>>h[i]>>t[i];
a[i]=t[i]-d[h[i]];
}
sort(a+1,a+1+m);
for(int i=1;i<=m;i++)s[i]=s[i-1]+a[i];
memset(f,0x3f,sizeof(f));
for(int i=0;i<p;++i)f[i][0]=0;
for(int i=1;i<=p;i++){
int l=1,r=1;
for(int j=1;j<=m;j++){
int k=a[j];
while(l<r&&qy(i,l+1)-qy(i,l)<=k*(q[l+1]-q[l]))++l;
f[i][j]=qy(i,l)-a[j]*q[l]+a[j]*j-s[j];
while(l<r&&(qy(i,r)-qy(i,r-1))*(j-q[r])>=(q[r]-q[r-1])*(f[i-1][j]+s[j]-qy(i,r)))--r;
q[++r]=j;
}
}
cout<<f[p][m];
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号