会员
周边
新闻
博问
闪存
众包
赞助商
Chat2DB
所有博客
当前博客
我的博客
我的园子
账号设置
会员中心
简洁模式
...
退出登录
注册
登录
喵哥解说
博客园
首页
新随笔
联系
订阅
管理
上一页
1
2
3
4
5
6
下一页
2020年7月14日
ROS入门笔记(十三):分布式通信
摘要: ROS入门笔记(十三):分布式通信 ROS是一种分布式软件框架,节点之间通过松耦合的方式进行组合。 01 如何实现分布式多机通信 1.1 设置IP地址,确保底层链路的连通 步骤一,树莓派和电脑必须在同一个局域网。 步骤二,输入ifconfig,查看两台计算机(ggk-pc,raspi2)的IP地址;
阅读全文
posted @ 2020-07-14 22:26 喵哥解说
阅读(1241)
评论(0)
推荐(0)
2020年7月13日
搜索引擎检索信息
摘要: 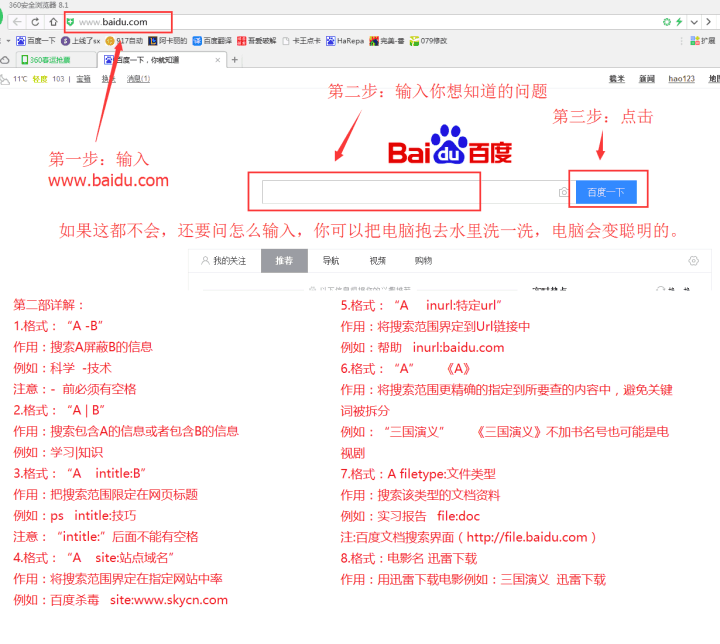
阅读全文
posted @ 2020-07-13 17:42 喵哥解说
阅读(229)
评论(0)
推荐(0)
ROS入门笔记(十二):动作编程 (C++)
摘要: ROS入门笔记(十二):动作编程 (C++) 01 导读 C++代码必须通过编译生成可执行文件; python代码是可执行文件,不需要编译; 开发的功能包都放在catkin_ws这样一个工作空间里; 新建的功能包取名为action_example; 工作模式的结构示意图如下: 什么是动作(actio
阅读全文
posted @ 2020-07-13 13:41 喵哥解说
阅读(1354)
评论(0)
推荐(0)
2020年7月11日
ROS入门笔记(十一):编写与测试简单的Service和Client (Python)
摘要: ROS入门笔记(十一):编写与测试简单的Service和Client (Python) 01 导读 C++代码必须通过编译生成可执行文件; python代码是可执行文件,不需要编译; 开发的功能包都放在catkin_ws这样一个工作空间里; 新建的功能包取名为service_example,实现两个
阅读全文
posted @ 2020-07-11 14:00 喵哥解说
阅读(3052)
评论(0)
推荐(0)
2020年7月9日
ROS入门笔记(十):编写与测试简单的消息发布器和订阅器(C++)
摘要: ROS入门笔记(十):编写与测试简单的消息发布器和订阅器(C++) 01 导读 开发的功能包都放在catkin_ws这样一个工作空间里; 新建的功能包取名为topic_example,在这个功能包中分别编写两个节点程序talker.cpp和listener.cpp,发布节点(talker)向话题(c
阅读全文
posted @ 2020-07-09 15:46 喵哥解说
阅读(959)
评论(0)
推荐(0)
2020年7月3日
ROS入门笔记(九):编写ROS的第一个程序hello world(重点)
摘要: ROS入门笔记(九):编写ROS的第一个程序hello world(重点) 1 Catkin工作空间 工作空间(workspace)是一个存放工程开发相关文件的文件夹。 src:代码空间(Source Space) build:编译空间(Build Space) devel:开发空间(Develop
阅读全文
posted @ 2020-07-03 19:54 喵哥解说
阅读(2653)
评论(0)
推荐(0)
Catkin工作空间 (重点)
摘要: Catkin工作空间 (重点) 1 Catkin工作空间 工作空间(workspace)是一个存放工程开发相关文件的文件夹。 src:代码空间(Source Space) build:编译空间(Build Space) devel:开发空间(Development Space) install:安装
阅读全文
posted @ 2020-07-03 19:49 喵哥解说
阅读(1347)
评论(1)
推荐(1)
ROS学习笔记(八): ROS通信架构
摘要: ROS学习笔记(八): ROS通信架构 本章主要介绍了通信架构的基础通信方式和相关概念。其中首先介绍了最小的进程单元节点Node,和节点管理器Node master。了解了ROS中的进程都是由很多的Node组成,并且由Node master来管理这些节点。 介绍ROS的“发动机”——launch文件
阅读全文
posted @ 2020-07-03 19:48 喵哥解说
阅读(5052)
评论(0)
推荐(0)
2020年6月21日
ROS入门笔记(七):详解ROS文件系统
摘要: ROS入门笔记(七):详解ROS文件系统 01 Catkin编译系统 1.1 Catkin特点 1.2 Catkin工作原理 1.3 使用catkin_make进行编译02 Catkin工作空间 2.1 创建catkin工作空间 2.2 编译工作空间 2.3 设置环境变量 2.4 检查环境变量03
阅读全文
posted @ 2020-06-21 17:49 喵哥解说
阅读(2859)
评论(0)
推荐(1)
2020年6月15日
ROS入门笔记(六):ROS系统架构
摘要: ROS入门笔记(六): ROS系统架构 1 ROS系统架构 1.1 文件系统(重点) 1.2 计算图 1.3 开源社区 1 ROS系统架构 1.1 文件系统(重点) 文件系统:主要指在硬盘里能看到的ROS目录和文件: 1)元功能包(Meta Packages):组织多个用于同一目的功能包。2)元功能
阅读全文
posted @ 2020-06-15 20:45 喵哥解说
阅读(1608)
评论(0)
推荐(0)
上一页
1
2
3
4
5
6
下一页
公告


 浙公网安备 33010602011771号
浙公网安备 33010602011771号