
20211325 2023-2024-1 《信息安全系统设计与实现(上)》第十周学习笔记
20211325 2023-2024-1 《信息安全系统设计与实现(上)》第十周学习笔记
一、任务要求
自学教材第12章,提交学习笔记(10分),评分标准如下
1. 知识点归纳以及自己最有收获的内容,选择至少2个知识点利用chatgpt等工具进行苏格拉底挑战,并提交过程截图,提示过程参考下面内容 (4分) “我在学***X知识点,请你以苏格拉底的方式对我进行提问,一次一个问题” 核心是要求GPT:“请你以苏格拉底的方式对我进行提问” 然后GPT就会给你提问,如果不知道问题的答案,可以反问AI:“你的理解(回答)是什么?” 如果你觉得差不多了,可以先问问GPT:“针对我XXX知识点,我理解了吗?” GPT会给出它的判断,如果你也觉得自己想清楚了,可以最后问GPT:“我的回答结束了,请对我的回答进行评价总结”,让它帮你总结一下。
2. 问题与解决思路,遇到问题最先使用chatgpt等AI工具解决,并提供过程截图(3分)
3. 实践过程截图,代码链接(2分)
4. 其他(知识的结构化,知识的完整性等,提交markdown文档,使用openeuler系统等)(1分)
二、课本知识总结
学习目标
学习理解块设备I/O和缓冲区管理;理解块设备I/O的原理和I/O缓冲的优点;讨论Unix的缓冲区管理算法;掌握PV算法,通过编程项目更好的理解文件系统中的I/O操作。
块设备I/O缓冲区
什么是块设备:
块设备是i/o设备中的一类,是将信息存储在固定大小的块中,每个块都有自己的地址,还可以在设备的任意位置读取一定长度的数据,例如硬盘,U盘,SD卡等。
文件系统使用一系列I/O缓冲区作为块设备的缓存内存。当进程试图读取(dev,blk)标识的磁盘块时。它首先在缓冲区缓存中搜索分配给磁盘块的缓冲区。如果该缓冲区存在并且包含有效数据、那么它只需从缓冲区中读取数据、而无须再次从磁盘中读取数据块。如果该缓冲区不存在,它会为磁盘块分配一个缓冲区,将数据从磁盘读人缓冲区,然后从缓冲区读取数据。
当某个块被读入时、该缓冲区将被保存在缓冲区缓存中,以供任意进程对同一个块的下一次读/写请求使用。
当进程写入磁盘块时,它首先会获取一个分配给该块的缓冲区。然后,它将数据写入缓冲区,将缓冲区标记为脏,以延迟写入,并将其释放到缓冲区缓存中。
- 定义一个bread(dev, blk)函数,它会返回一个包含有效数据的缓冲区(指针)。
- 从缓冲区读取数据后,进程通过brelse(hp)格缓冲区释放回缓冲区缓存。 write_block(dev, blk, data)函数
Unix I/O缓冲区管理算法
- I/O缓冲区:内核中的一系列NBUF缓冲区用作缓冲区缓存。每个缓冲区用一个结构体表示。
typdef struct buf{ struct buf *next_free; //freelist pointer struct buf *next_dev; //dev_list pointer int dev,blk; //assigned disk block; int opcode; //READ|WRITE int dirty; //buffer data modified int async; //ASYNC write flag int valid; //buffer data valid int busy; //buffer is in use int wanted; some process needs this buffer struct, semaphore lock=l ; //buffer locking semaphore; value=L struct semaphore iodone=0; //for process to wait for I/O completion; char buf[BLKSIZE]; //block data area } BUFFER; BUFFER buf[NBUF], *freelist; // NBUF buffers and free buffer list
- 设备表:每个块设备用一个设备表结构表示。
struct devtab{ u16 dev; // major device number BUFFER *dev_list; // device buffer list BUFFER*io_queue // device I/0 queue }devtab[NDEV];
-
缓冲区初始化:当系统启动时,所有I/O缓冲区都在空闲列表中,所有设备列表和T/O队列均为空。
-
缓冲区列表:当缓冲区分配给(dev,blk)时,它会被插入设备表的dev_list中。如果缓冲区当前正在使用,则会将其标记为BUSY(繁忙)并从空闲列表中删除。
-
Unix getblk/brelse算法
- 数据一致性:为确保数据一致性,getblk一定不能给同一个(dev, blk)分配多个缓冲区 这可以通过让进程从休眠状态唤醒后再次执行“重试循环”来实现。读者可以验证 分配的每个缓冲区都是唯一的一其次,脏缓冲区在重新分配之前被写出来,这保证了数据的一致性。
- 缓存效果:缓存效果可通过以下方法实现 释放的緩冲区保留在设备列表中,以便 可能重用,标记为延迟写入的緩冲区不会立即产生I/O,并且可以重用。缓冲区会被释放到 空闲列表的末尾,但分配是从空闲列表的前面开始的,这是基于LRU (最近最少使用)原则,它有助于延长所分配缓冲区的使用期,从而提高它们的缓存效果。
- 临界区:设备中断处理程序可操作缓冲区列表,例如从设备表的I/O队列中删除 bp,更改其状态并调用brelse(bp)。所以,在getb汰和brelse中,设备中断在这些临界区中 会被屏蔽。这些都是隐含的,但没有在算法中表现出来。
Unix 算法的缺点
- 效率低下:该算法依赖于重试循环。
- 缓存效果不可预知:在Unix算法中,每个释放的缓冲区都可被获取,如果缓冲区 由需要空闲缓冲区的进程获取,那么将会重新分配缓冲区,即使有些进程仍然需要当前的缓冲区。
- 可能会出现饥饿:Unix算法基于“自由经济”原则,即每个进程都有尝试的机会,但不能保证成功,因此,可能会出现进程饥饿。
- 该算法使用只适用丁单处理器系统的休眠/唤醒操作
新的I/O缓冲区管理算法
-
计数信号量可用来表示可用资源的数量,例如∶空闲缓冲区的数量。
-
当多个进程等待一个资源时,信号量上的V操作只会释放一个等待进程,该进程不必重试,因为它保证拥有资源。
使用信号量的缓冲区管理算法:
假设有一个单处理器内核(一次运行一个进程)。使用计数信号量上的P/V来设计满足以下要求的新的缓冲区管理算法∶
保证数据一致性。
良好的缓存效果。
高效率∶没有重试循环,没有不必要的进程"唤醒"。
无死锁和饥饿。
PV算法
BUFFER *getb1k(dev,blk): while(1){ P(free); //get a free buffer first if (bp in dev_1ist){ if (bp not BUSY){ remove bp from freelist; P(bp); // lock bp but does not wait return bp; // bp in cache but BUSY V(free); // give up the free buffer P(bp); // wait in bp queue return bp; // bp not in cache,try to create a bp=(dev,blk) bp = frist buffer taken out of freelist; P(bp); // lock bp,no wait if(bp dirty){ awzite(bp); // write bp out ASYNC,no wait continue; // continue from (1) reassign bp to(dev,blk); // mark bp data invalid,not dir return bp; // end of while(1); brelse(BUFFER *bp), { iF (bp queue has waiter)( V(bp); return; } if(bp dirty && free queue has waiter){ awrite(bp);zeturn;} enter bp into(tail of) freelist;V(bp);V(free); }
PV算法的优越性:
- 缓冲区唯一性
- 无重试循环
- 无不必要唤醒
- 缓存效果
- 无死锁和饥饿
I/O缓冲区管理算法比较
1.系统组织
用户界面:这是模拟系统的用户界面部分。它会提示输人命令、显示命令执行、显示系统状态和执行结果等。在开发过程中,读者可以手动输入命令来执行任务。在最后测试过程中,任务应该有自己的输入命令序列。例如,各任务可以读取包含命令的输入文件。
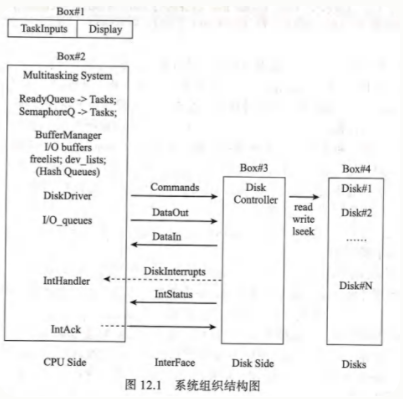
2.多任务处理系统
3.磁盘驱动程序
start io():维护设备I/O队列,并对I/O 队列中的缓冲区执行 I/O操作。
中断处理程序:在每次I/O操作结束时,磁盘控制器会中断CPU。当接收到中断后,中断处理程序首先从 IntStatus中读取中断状态。
4.磁盘中断
从磁盘控制器到CPU的中断由 SIGUSR1(#10)信号实现。在每次I/O操作结束时,磁盘控制器会发出kill(ppid,SIGUSR1)系统调用,向父进程发送 SIGUSR1信号,充当虚拟CPU中断。
为防止竞态条件,磁盘控制器必须要从CPU接收一个中断确认,才能再次中断。
5.虚拟磁盘
使用Linux系统调用lseek()、read()和 write(),我们可以支持虚拟磁盘上的任何块I/O操作。
6.磁盘控制器
磁盘控制器是主进程的一个子进程。因此,它与CPU 端独立运行,除了它们之间的通信通道,通信通道是 CPU和磁盘控制器之间的接口。通信通道由主进程和子进程之间的管道实现。
命令:从 CPU到磁盘控制器的I/O命令。
DataOut:在写操作中从 CPU 到磁盘控制器的数据输出。
DataIn:在读操作中从磁盘控制器到CPU 的数据。
IntStatus:从磁盘控制器到CPU 的中断状态。
IntAck:从CPU到磁盘控制器的中断确认。
缓冲区理解

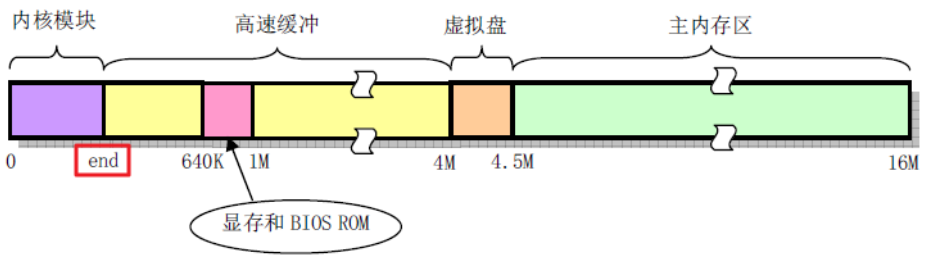
缓冲区是内存与外设(如硬盘)进行数据交互的媒介。内存与硬盘最大的区别在于,硬盘的作用仅仅是对数据信息以很低的成本做大量数据的断电保存,并不参与运算(因为 CPU 无法到硬盘上寻址),而内存除了需要对数据进行保存以外,更重要的是与 CPU、总线配合进行数据运算。缓冲区则介于两者之间,它既对数据信息进行保存,也能够参与一些像查找、组织之类的间接、辅助性运算。有了缓冲区这个媒介后,对外设而言,它仅需要考虑与缓冲区进行数据交互是否符合要求,而不需要考虑内存如何使用这些交互的数据;对内存而言,它也仅需要考虑与缓冲区交互的条件是否成熟,而不需要关心此时外设对缓冲区的交互情况。两者的组织、管理和协调将由操作系统统一操作。
缓冲区在内存中的位置示例
循环缓冲区实践
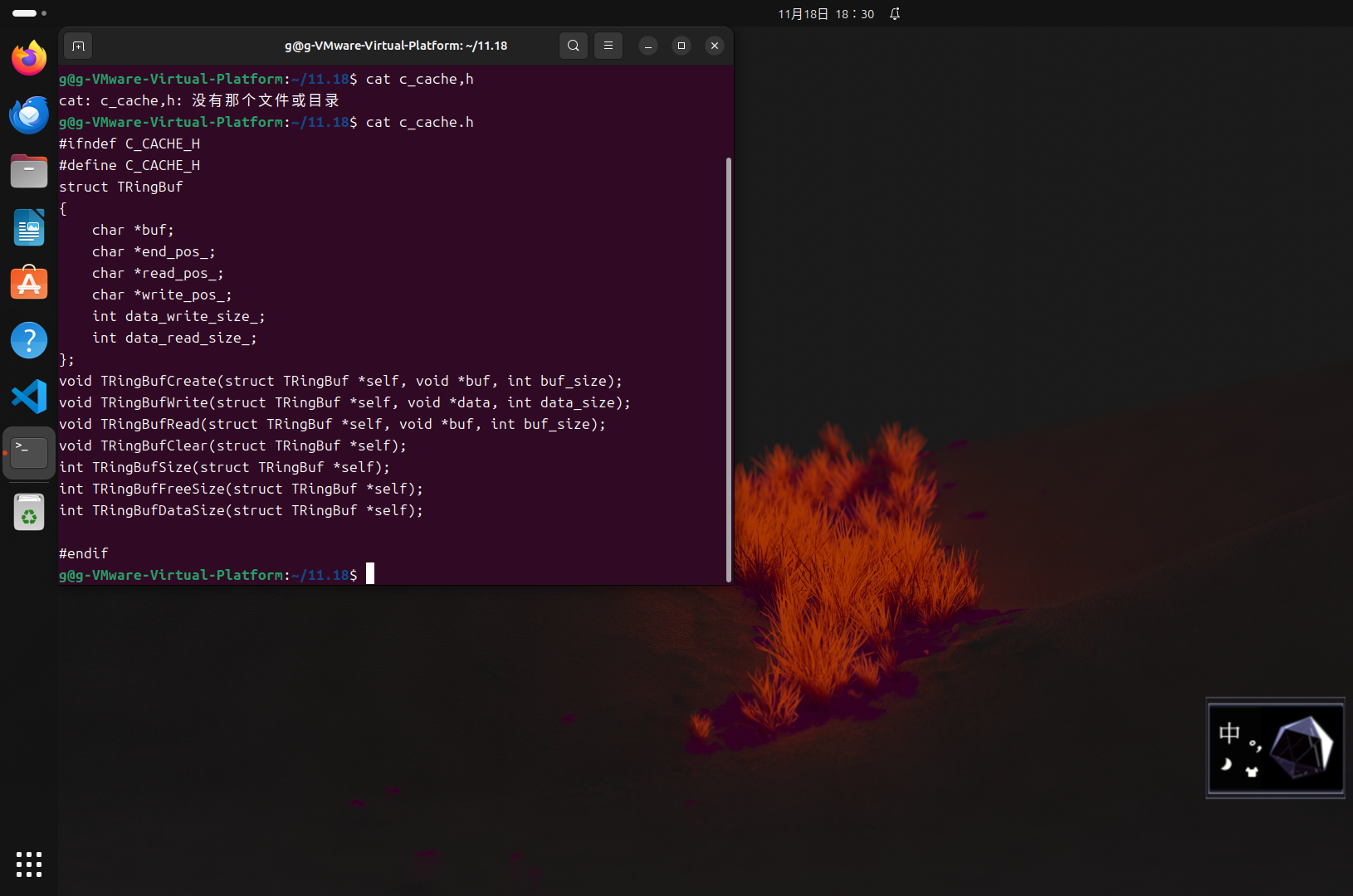
(1)c_cache.h
#ifndef C_CACHE_H #define C_CACHE_H struct TRingBuf { char *buf; char *end_pos_; char *read_pos_; char *write_pos_; //int data_size_; int data_write_size_; int data_read_size_; }; void TRingBufCreate(struct TRingBuf *self, void *buf, int buf_size);//construct void TRingBufWrite(struct TRingBuf *self, void *data, int data_size); void TRingBufRead(struct TRingBuf *self, void *buf, int buf_size); void TRingBufClear(struct TRingBuf *self);//destruct int TRingBufSize(struct TRingBuf *self); int TRingBufFreeSize(struct TRingBuf *self); int TRingBufDataSize(struct TRingBuf *self); #endif
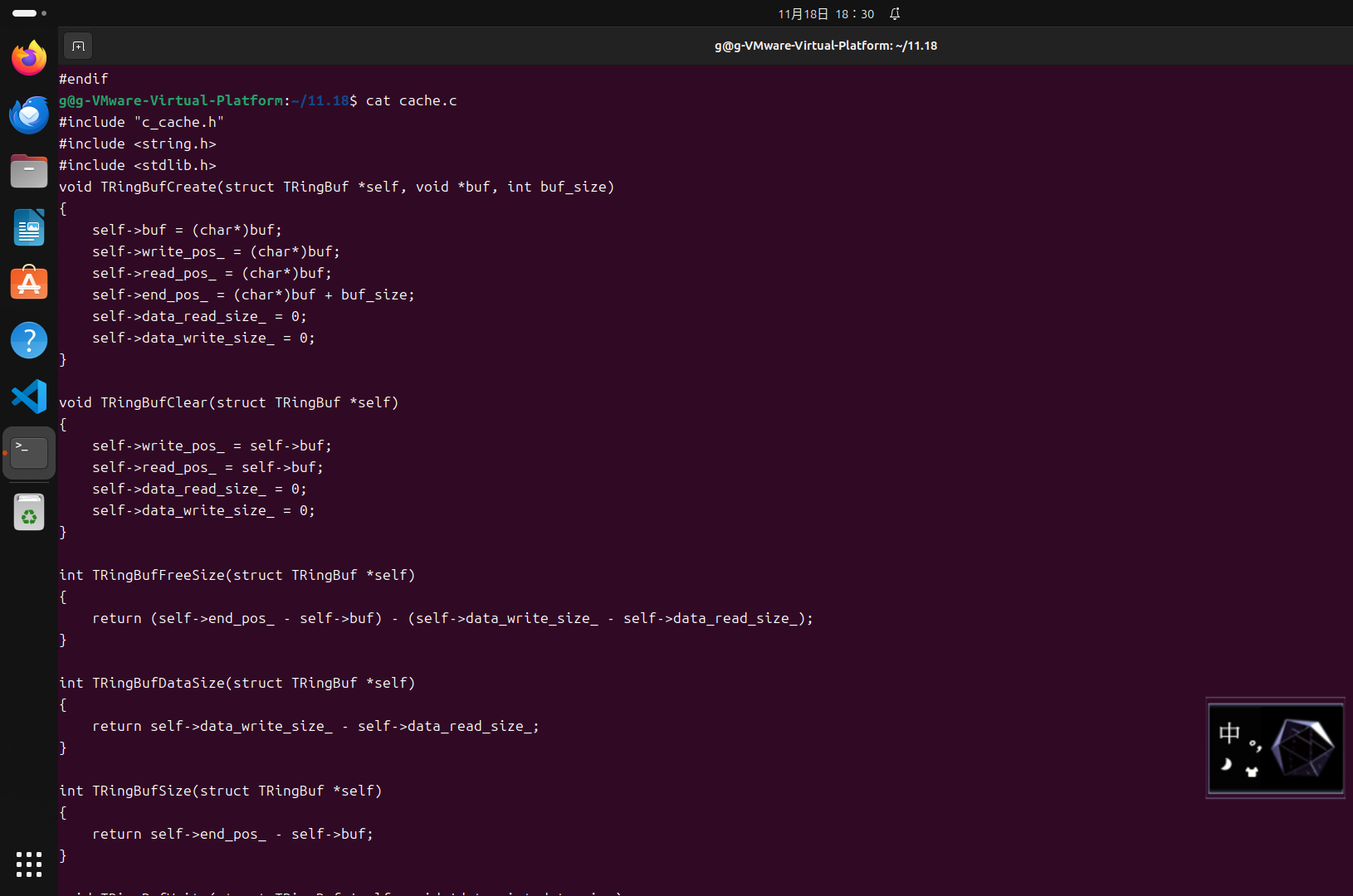
(2)cache.c
#include "c_cache.h" #include <string.h> #include <stdlib.h> void TRingBufCreate(struct TRingBuf *self, void *buf, int buf_size) { self->buf = (char*)buf; self->write_pos_ = (char*)buf; self->read_pos_ = (char*)buf; self->end_pos_ = (char*)buf + buf_size; //self->data_size_ = 0; self->data_read_size_ = 0; self->data_write_size_ = 0; } void TRingBufClear(struct TRingBuf *self) { self->write_pos_ = self->buf; self->read_pos_ = self->buf; //self->data_size_ = 0; self->data_read_size_ = 0; self->data_write_size_ = 0; } int TRingBufFreeSize(struct TRingBuf *self) { return (self->end_pos_ - self->buf) - (self->data_write_size_ - self->data_read_size_); } int TRingBufDataSize(struct TRingBuf *self) { return self->data_write_size_ - self->data_read_size_; } int TRingBufSize(struct TRingBuf *self) { return self->end_pos_ - self->buf; } void TRingBufWrite(struct TRingBuf *self, void *data, int data_size) { int free_size = TRingBufFreeSize(self); int result = data_size >= free_size ? free_size : data_size; int size = self->end_pos_ - self->write_pos_; if(size > result) size = result; memmove(self->write_pos_, data, size); self->write_pos_ += size; if(self->write_pos_ >= self->end_pos_) { self->write_pos_ = self->buf; data_size = result - size; if(data_size > 0) { memmove(self->write_pos_, (char *)data + size, data_size); self->write_pos_ += data_size; } } self->data_write_size_ += result; } void TRingBufRead(struct TRingBuf *self, void *buf, int buf_size) { int data_size = TRingBufDataSize(self); int result = buf_size >= data_size ? data_size : buf_size; int size = self->end_pos_ - self->read_pos_; if(size > result) size = result; memmove(buf,(const void *)self->read_pos_, size); self->read_pos_ += size; if(self->read_pos_ >= self->end_pos_){ self->read_pos_ = self->buf; data_size = result - size; if(data_size > 0) { memmove((char *)buf + size, self->read_pos_, data_size); self->read_pos_ += data_size; } } self->data_read_size_ += result; }
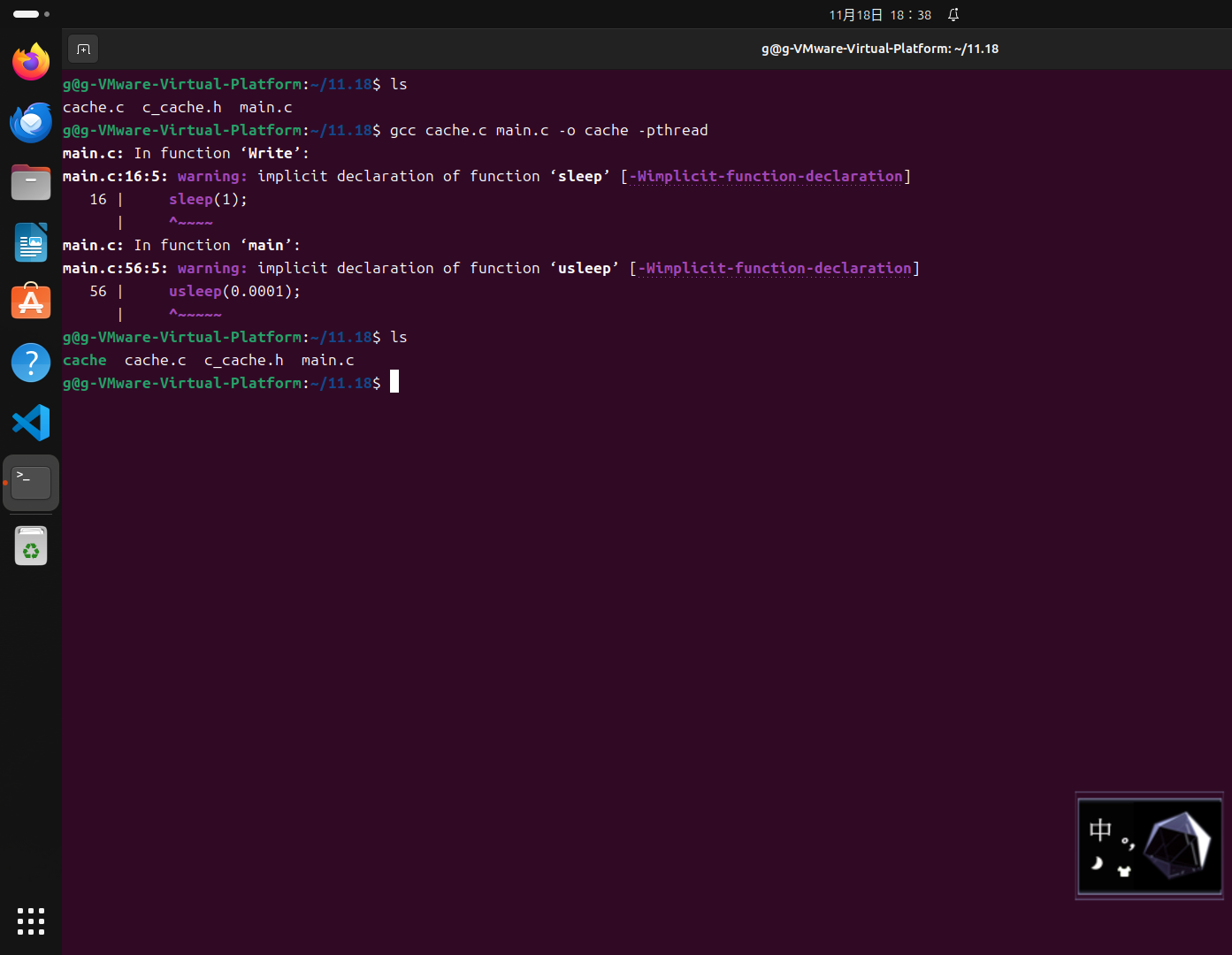
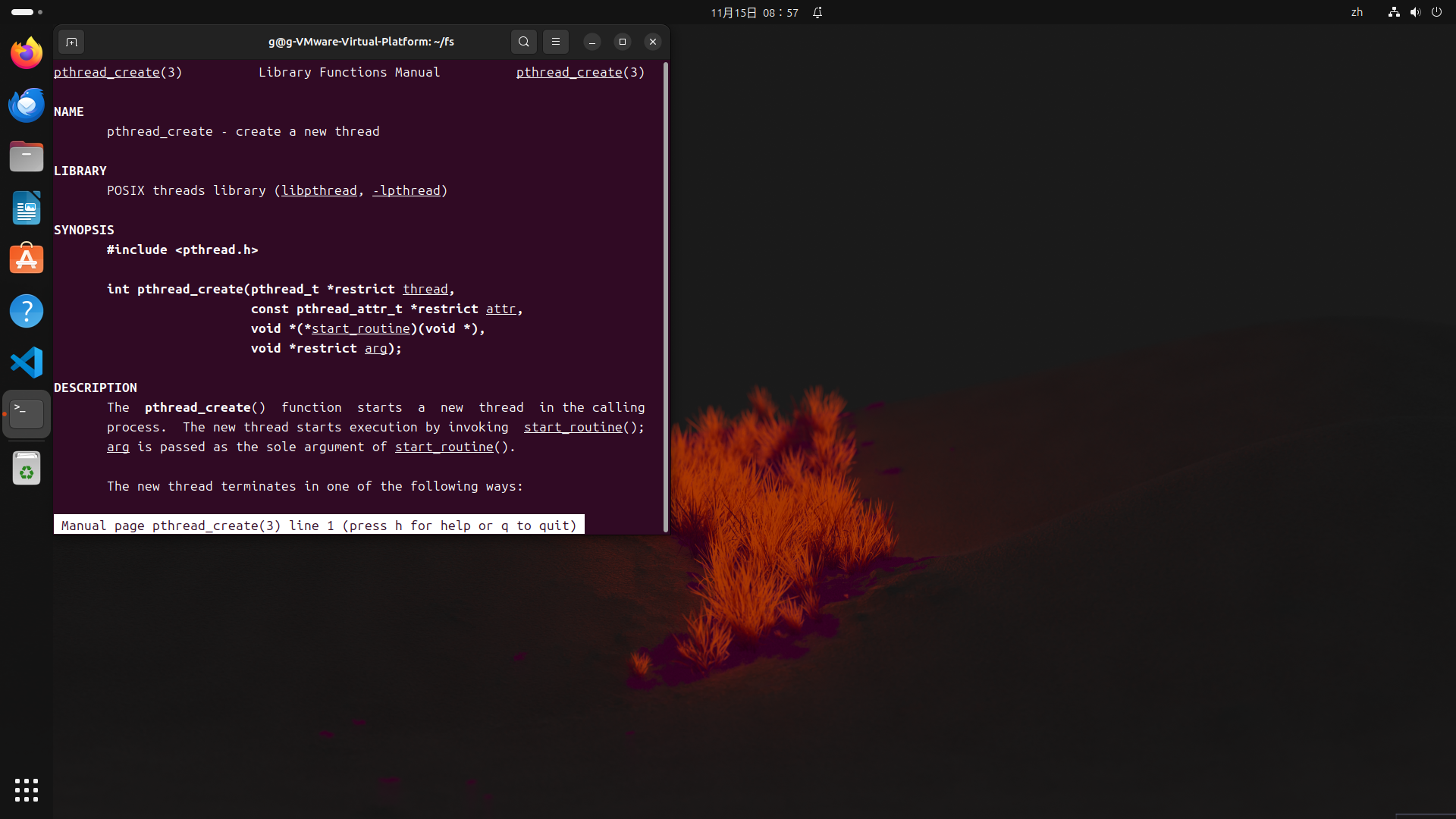
(3)main.c
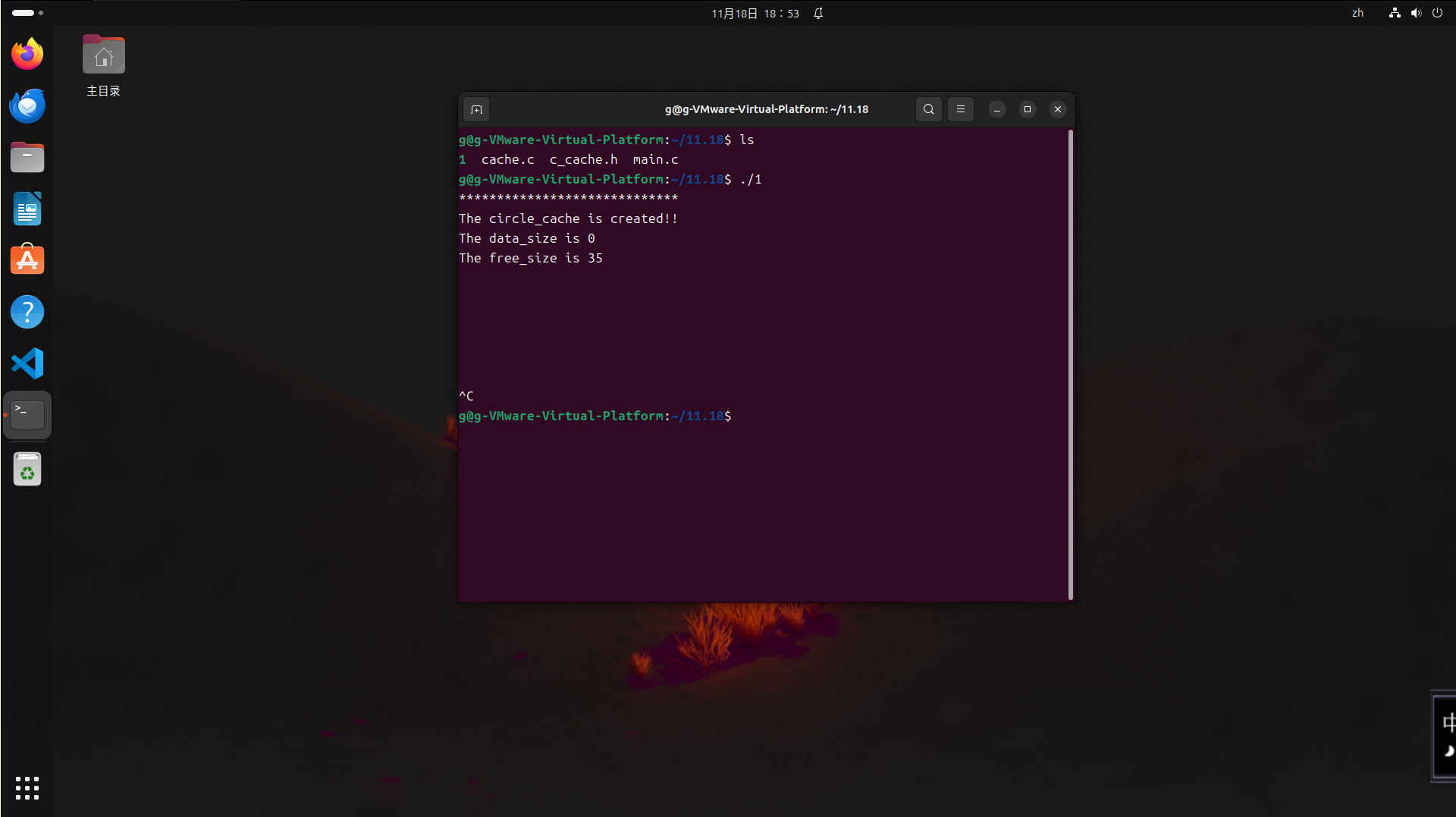
#include "c_cache.h" #include <pthread.h> #include <string.h> #include <stdlib.h> #include <stdio.h> struct TRingBuf *Buf = NULL; void* Write(void *reg) { char r[] = "qwertyuiopasdfghjklzxcvbnm"; TRingBufWrite(Buf, r, 26); printf("*****************************\n"); printf("First Write success!!\n"); printf("The data_size is %d\n",TRingBufDataSize(Buf)); printf("The free_size is %d\n",TRingBufFreeSize(Buf)); printf("The data of buf is :%s\n", Buf->buf); sleep(1); char s[] = "qwertyuiopasdfghjklzxcvbnm"; TRingBufWrite(Buf, s, 26); printf("*****************************\n"); printf("Second Write success!!\n"); printf("The data_size is %d\n",TRingBufDataSize(Buf)); printf("The free_size is %d\n",TRingBufFreeSize(Buf)); printf("The data of buf is :%s\n", Buf->buf); return NULL; } void* Read(void *reg) { char *buf = (char *)malloc(16*sizeof(char)); TRingBufRead(Buf, buf, 16); printf("*****************************\n"); printf("The result of reading is :%s\n", buf); free(buf); buf = NULL; printf("The data_size is %d\n",TRingBufDataSize(Buf)); printf("The free_size is %d\n", TRingBufFreeSize(Buf)); sleep(0.5); buf = (char *)malloc(16*sizeof(char)); TRingBufRead(Buf, buf, 16); printf("*****************************\n"); printf("The result of reading is :%s\n", buf); free(buf); buf = NULL; return NULL; } int main() { pthread_t tid[2]; Buf = (struct TRingBuf*)malloc(sizeof(struct TRingBuf)); char str[] = "12345678901234567890123456789012345"; TRingBufCreate(Buf, str, 35); printf("*****************************\n"); printf("The circle_cache is created!!\n"); printf("The data_size is %d\n",TRingBufDataSize(Buf)); printf("The free_size is %d\n", TRingBufFreeSize(Buf)); sleep(0.01); int ret = pthread_create(&tid[0], NULL, Write, NULL); if(ret != 0) printf("pthread create fail\n"); usleep(0.0001); int re = pthread_create(&tid[1], NULL, Read, NULL); if(re != 0) printf("pthread create fail\n"); sleep(3); TRingBufClear(Buf); free(Buf); Buf = NULL; return 0; }
实现截图:
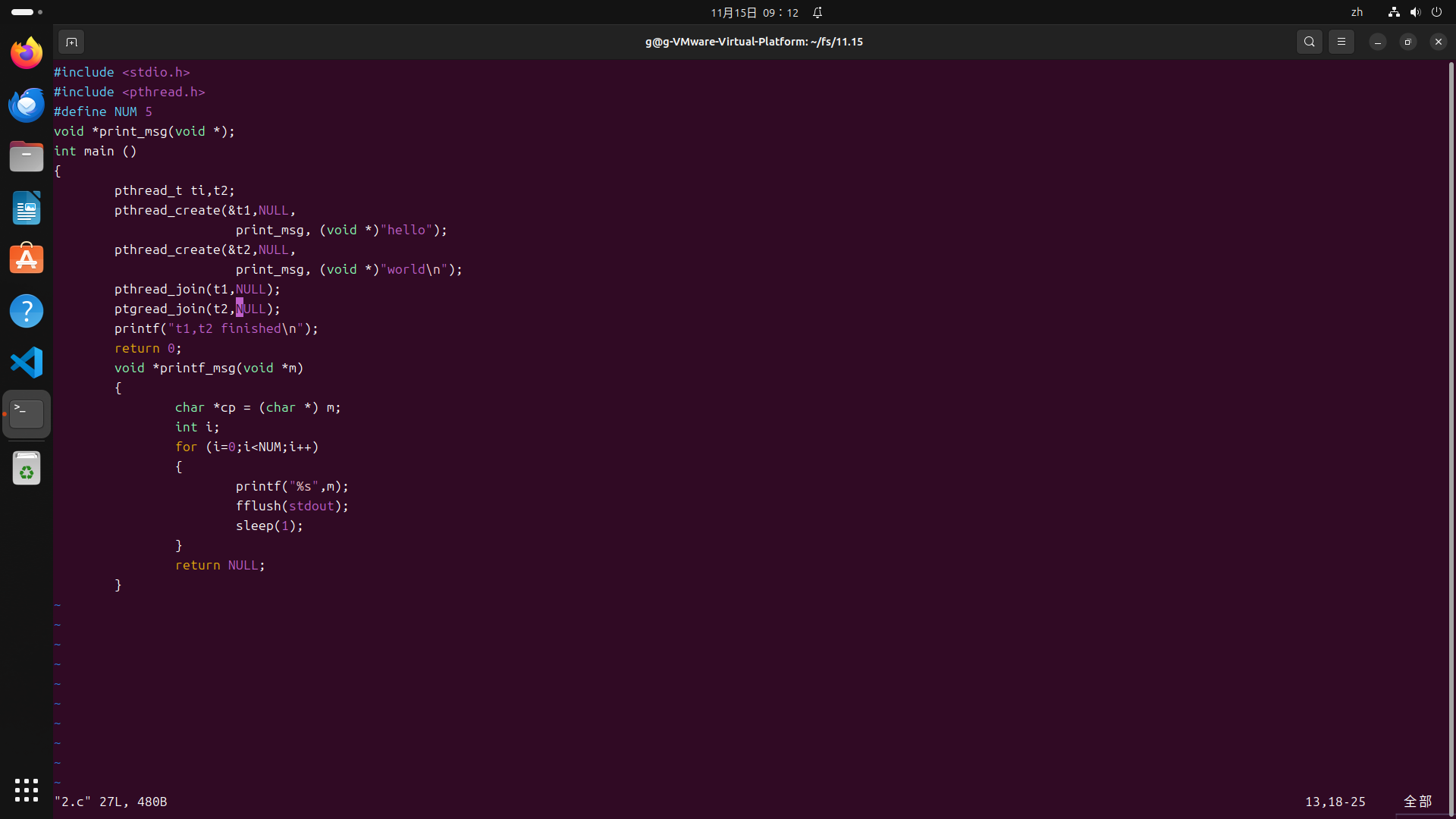
三、课堂代码实现
四、苏格拉底挑战
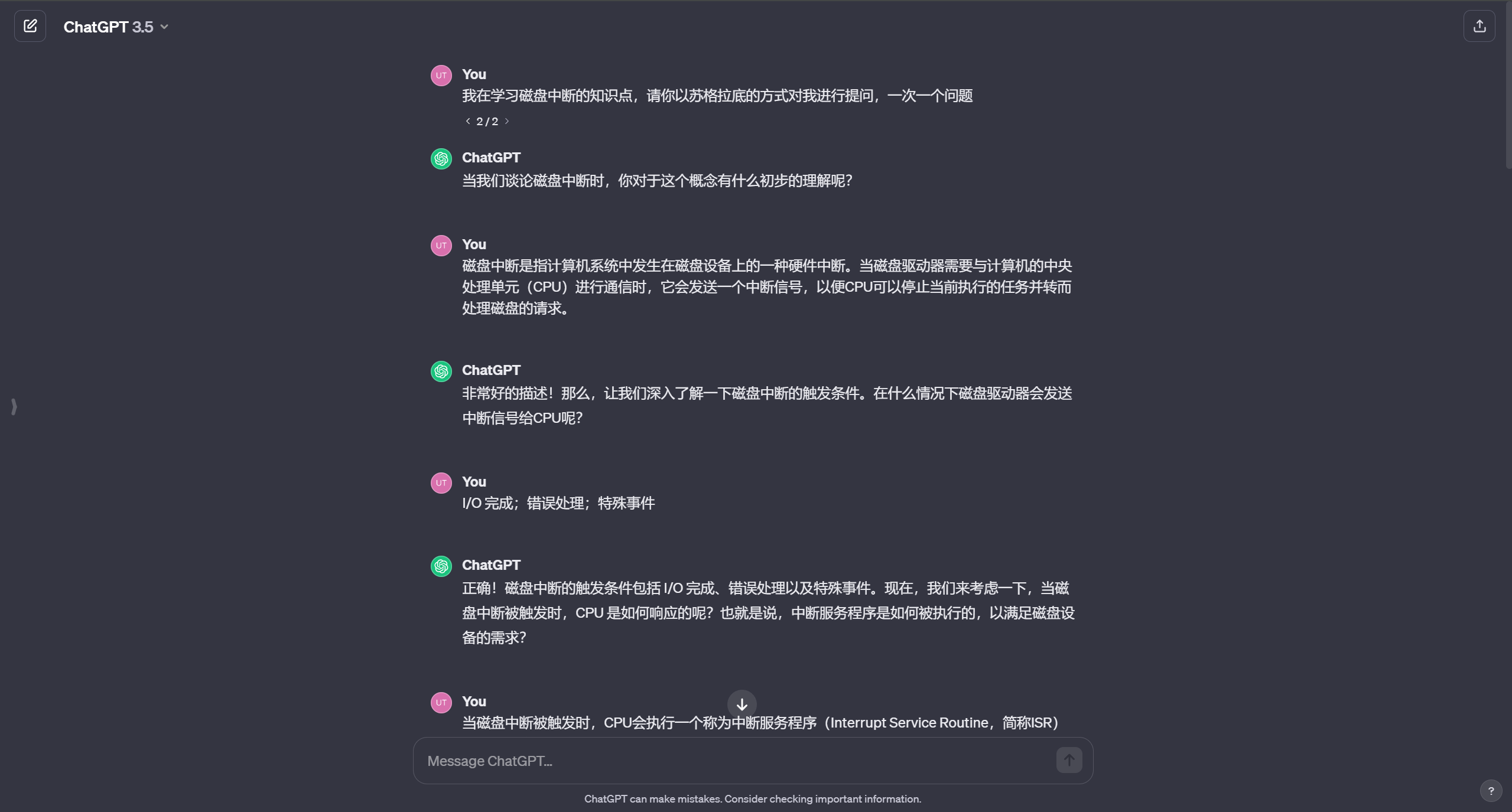
(1)磁盘中断

(2)虚拟磁盘



 浙公网安备 33010602011771号
浙公网安备 33010602011771号