Bellman-Ford算法和SPFA学习笔记
Bellman-Ford
前置知识
- 首先你需要知道图论最核心的一个思路——松弛。
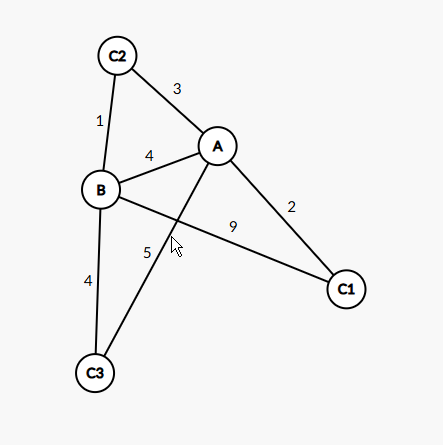
- 他是啥呢?笔者当时学的时候也花了亿堆时间理解它,就是假如我们现在有一些边,如图:

简单来说,松弛就是不断的更新两个点的距离使得它比之前的答案更优。
在这张图片里,我们将要松弛的 \(2\) 个节点为 \((A,B)\) ,\(A\) 为源点
那么它的原始距离是 \(10\) ,那么如果我更新了他的一条路径(松弛成功),这个路径的边权和一定是要比 \(10\) 小的。
好,那我们先来遍历和 \(B\) 点有直接连边的节点。
-
先看 \(C_1\) 那我们知道现在点 \(C_1\) 到点 \(A\) 的距离是 \(2\) ,那因为 \(C_1\) 到点 \(B\) 的距离是 \(9\) ,所以 \(A\) 到 \(B\) 经过点 \(C_1\) 的距离就是 \(2+9=11\) ,很显然,这个答案是比当前已知答案要差的。所以这次松弛并没有成功,我们选择放弃当前绕路的边权和。
-
再看 \(C_2\) 那我们知道现在点 \(C_2\) 到点 \(A\) 的距离是 \(3\) ,那因为 \(C_2\) 到点 \(B\) 的距离是 \(1\) ,所以 \(A\) 到 \(B\) 经过点 \(C_2\) 的距离就是 \(1+3=4\) ,这时候我们发现,这个答案是比当前已知答案要优的。所以这次松弛成功,我们选择更新当前绕路的边权和为 \(A\sim B\) 目前为止的最短路径。更新后的图如下:
-
最后看 \(C_3\) 那我们知道现在点 \(C_3\) 到点 \(A\) 的距离是 \(5\) ,那因为 \(C_3\) 到点 \(B\) 的距离是 \(4\) ,所以 \(A\) 到 \(B\) 经过点 \(C_3\) 的距离就是 \(4+5=9\) ,很显然,这个答案是比当前已知答案要差的。所以这次松弛并没有成功,我们选择放弃当前绕路的边权和。
那么经过一轮松弛操作下来,我们最终所的结果就是——\(A\sim B\) 的最短路为 \(4\) 。
正题
如果你松弛理解好了,那么Bellman-Ford算法就是对于每一个点和源点进行松弛操作,如果答案更优,那么更新该点到源点的距离。
这样的松弛操作每次必然能确定 \(\ge 1\) 个点的最短路。那么我们的BellmanFord算法的轮数就是 \(n-1\) 轮。
换句话说,当一个有解的最短路使用BellmanFord求解时进行的 \(\ge n\) 轮的操作都是没有意义的。那么如果该图无解呢?
判负环
- 如果一个有负环的图使用BF(BellmanFord)算法求解,每次进行一大轮的松弛都会导致更新,这会导致最短路随着轮数的增加越来越小,那么我们在用BF算法判断负环时只需要在 \(n-1\) 轮结束后再进行一轮松弛,如果最短路变了,那么该图有负环! 因为正常的图在第 \(n-1\) 轮过后无论在如何松弛都会失败,而有负环的图每次松弛都能更新最短路长度。
貌似BF算法比别的算法的有点就只有这一个
时间复杂度
- 这个算法的时间复杂度巨巨巨好算,是 \(O(NE)\) ,(\(N\) 是点数 \(E\) 是边数)。
模板
/*Bellman-Ford算法板子*/
#include <bits/stdc++.h>
using namespace std;
struct edge {
int to, nxt, l; //暴力存边
} e[1000001];
int n, m, s; //点,边,源点
long long d[1000001];//d[i]记录源点到点i的距离,longlong要开因为太小的话没法判断是否有解
int main() {
memset(d,0x3f,sizeof d);
scanf("%d%d%d", &n, &m,&s);
d[s] = 0;//起点一定要初始化!
for (int i = 1; i <= m; i++) {
scanf("%d%d%d", &e[i].to, &e[i].nxt, &e[i].l);
}
for (int i = 1; i <= n - 1; i++) {
//先整正常操作
for (int j = 1; j <= m; j++) {
if (d[e[j].to] + e[j].l < d[e[j].nxt]) d[e[j].nxt] = d[e[j].to] + e[j].l;
}
}
for (int i = 1; i <= m; i++) { //开始判断负环
if (d[e[i].to] + e[i].l < d[e[i].nxt]) {
cout << -1;
return 0;
}
}
for(int i = 1;i <= n;i++){
if(d[i] < d[0]/2) cout<<d[i]<<"\n";//有解
else puts("NoPath");
}
}
SPFA
- 对于上面的BF算法,我们会发现:在这一轮中每个店都要松弛,有好多店压根就没变,这岂不是太浪费时间了?!
- 那我们直接更新改变过的节点不就完了?!
- 他就是SPFA。我们把更改的节点入队,从队列中取节点进行松弛即可。
它死了
- 如果遇到节点巨巨巨巨稠密的图,SPFA会将一个节点入队入队入队入队——喜提TLE。
- 所以呢,如果没有负权边这边建议直接Dijkstra搞。
判断负环
- 如果一个点入队 \(n\) 次,那么就代表它被松弛了 \(n\) 次,即:有负环!
判断负环例题:P2850 [USACO06DEC] Wormholes G
/*体面意思就是,从任意一点出发,走一圈之后回到这个点路径长度总和小于零的路径是否存在,这不就是判断负环吗?!*/
#include <bits/stdc++.h>
using namespace std;
const int N = 1e6+10;
int pre[N], k; //链式前向星
struct edge {
int to, l, nxt;
} a[N]; //链式前向星
int dis[N];//点和源点的距离
int vis[N];//记录入队几次了(判断负环)
bool inqu[N];//记录元素是否在队列内部
int t, n, m, w;
queue <int> q;
void add(int u, int v, int w) {
a[++k] = {v, w, pre[u]}, pre[u] = k;
}
void spfa() {
while (!q.empty()) q.pop();
//我们在一个点入队的时候检测他是不是松弛了n次
vis[0] = 1;
inqu[0] = 1;
q.push(0);
while (!q.empty()) {
int hd = q.front();
q.pop();
inqu[hd] = 0;
for (int i = pre[hd]; i; i = a[i].nxt) { //有向边我们要用队头节点扩展未确定的节点
if (dis[hd] + a[i].l < dis[a[i].to]) {
dis[a[i].to] = dis[hd] + a[i].l;
//如果元素不在队列里面就push进去,避免重复push,因为队列中早晚轮到他,而且虽然队列没重新push但是对应的dis更新了
if (inqu[a[i].to] == 1) continue;
inqu[a[i].to] = 1;
vis[a[i].to]++;
if (vis[a[i].to] >= n) {
cout << "YES\n";
return ;
}
q.push(a[i].to);//服了这句没写又调了半小时。。。
}
}
}
puts("NO");
}
int main() {
scanf("%d", &t);
while (t--) {
memset(vis, 0, sizeof vis);
memset(inqu, 0, sizeof inqu);
memset(pre, 0, sizeof pre);
memset(dis, 0x3f, sizeof dis);
k = 0;
scanf("%d%d%d", &n, &m, &w);
for (int i = 1; i <= m; i++) {
int x, y, z;
scanf("%d%d%d", &x, &y, &z);
add(x, y, z); //双向建图 -> 调了半小时
add(y, x, z);
}
for (int i = 1; i <= w; i++) {
int x, y, z;
scanf("%d%d%d", &x, &y, &z);
add(x, y, -z); //时间逆转x等于时间流逝-x
}
dis[0] = 0;
for (int i = 1; i <= n; i++) {
add(0, i, 0);
}
spfa();
//因为负环不一定从哪一个点走都能遇见,所以我们直接让0号节点和其他节点建边权为零的有向边(超级源点思想),这样就能跑到所有节点了,还不影响其他节点和总时间,最后跑一遍0-n的SPFA
}
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号