[最优化理论与技术]预备知识
预备知识
课程内容
- 预备知识
- 线性规划
- 一维搜索方法
- 无约束最优化方法
- 约束最优化方法
- 工程应用优化
预备知识
- 最优化问题
- 多元函数的Taylor公式
- 多元函数极值问题
- 凸集、凸函数和凸优化
- 算法相关概念
- 算法概述
最优化问题
数学表示
- \(x=(x_1,x_2,...,x_n)\)是一个包含多变量的向量:决策变量
- \(c(x)\)是对各个变量约束的等式和不等式:约束条件
- 可行域:约束条件在空间围成的区域
- 可行解:可行域中每个点都是原问题的可行点
- \(f(x)\):目标函数
- 最优解:能使目标函数达到最大或最小的可行解
分类
按约束
- 无约束
- 有约束
- 等式约束
- 不等式约束
按目标函数
- 线性规划
- 非线性规划
按函数变量
- 整数规划
- 非整数规划
按目标函数个数
- 单目标优化
- 多目标优化
多元函数的Taylor公式
多元函数的梯度
偏导:多元函数降维时的变化,比如二元函数固定\(y\),只让\(x\)单独变化,从而看成关于\(x\)的一元函数的变化
记作\(\frac{\partial f(x,y)}{\partial x}\)
梯度:多元函数在\(A\)点无数个变化方向中变化最快的那个方向;每一个变量都沿着关于这个变量的偏导所指定的方向来变化,函数的整体变化就能达到最大 (变化的绝对值最大) 。
多元函数的极值与Hessian矩阵
参考Hessian矩阵与多元函数极值
一元函数极值问题:\(f(x)=x^2\),先求一阶导数\(f'(x)=2x\),根据费马定理极值点处的一阶导数一定等于0。
- 费马定理给出的是必要条件,由一阶导数=0可推出该店为极值,但不能由极值推出一阶导数=0
- 对该二次函数,一阶导数=0求得极值,但对\(f(x)=x^3\),只检查一阶导数是不足以推出结果的
- 对\(f(x)=x^3\),再求二阶导数,如果\(f''<0\),说明函数在该点取得局部极大值;如果\(f''>0\),说明函数在该点取得局部极小值;如果\(f''=0\),说明结果任然不确定,需要其他方式确定函数极值
多元函数极值问题:\(f=f(x,y,z)\),首先对每一个变量分别求偏导数,求得函数的可能极值点
接下来,继续求二阶导数,包含混合偏导共9个偏导函数,用矩阵表示得到
矩阵\(H\)就是一个三阶Hessian矩阵。扩展到一般情况,对一个在定义域内二阶连续可导的实质多元函数\(f(x_1,x_2,...,x_n)\)定义其Hessian矩阵\(H\)如下
当一元函数的二阶导数=0,不能确定函数在该点的极值性。类似地,当Hessian矩阵行列式=0,也不能断定多元函数极值性的情况。甚至可能得到一个鞍点,也就是一个既非极大值也非极小值的点。
基于Hessian矩阵,可判断多元函数极值情况如下:
- 如果Hessian矩阵是正定矩阵,则临界点处是一个局部极小值
- 如果Hessian矩阵是负定矩阵,则临界点处是一个局部极大值
- 如果Hessian矩阵是不定矩阵,则临界点处不是极值
判断矩阵是否正定:
- 顺序主子式;实对称矩阵为正定矩阵的充要条件是的各顺序主子式都大于零
- 特征值;实二次型矩阵为正定二次型的充要条件是的矩阵的特征值全大于零;负定二次型的充要条件是的矩阵的特征值全小于零;否则是不定的
泰勒展开式
一元函数的泰勒公式:设一元函数\(f(x)\)在包含点\(x_0\)的开区间\((a,b)\)内具有\(n+1\)阶导数,则当\(x \in (a,b)\)时,\(f(x)\)的\(n\)阶泰勒公式为:
其中,\(R_n(x)\)的拉格朗日余项表达形式
\(R_n(x)\)的皮亚诺余项表达形式
二元函数的泰勒公式:设二元函数\(z=f(x,y)\)在点\((x_0,y_0)\)的某一领域内连续且有直到\(n+1\)阶的连续偏导数,则有
其中,记号
表示
记号
表示
一般地,记号
表示
用一般化表达式重写上面的式子
拉格朗日余项为:
皮亚诺余项为:
Hessian矩阵与泰勒展开的关系:对于一个多维向量\(X\),多元函数\(f(X)\)在点\(X_0\)的领域内有连续二阶偏导数,可写出\(f(X)\)在点\(X_0\)处的二阶泰勒展开式
而\(\nabla^2 f(\mathbf{X}_0)\)显然是一个Hessian矩阵,所以可写成:
-
多元函数取得极值的必要条件:\(u=f(x_1,x_2,...,x_n)\)在点\(M\)处有极值,则有
\[\nabla f(M)=\left \{\frac{\partial f}{\partial x_1},\frac{\partial f}{\partial x_2},\cdots, \frac{\partial f}{\partial x_n}\right\}_M=0 \] -
多元函数取得极值的充分条件:其二阶偏导组成的Hessian矩阵为正定(局部极小值)or负定(局部极大值)
凸集、凸函数和凸优化问题
凸集
集合\(C\)内任意两点间的线段也在集合\(C\)内,则称集合\(C\)为凸集:
凸函数
定义在凸集\(C\)上的凸函数:
凸优化
机器学习主要做的就是优化问题,先初始化一下权重参数,然后利用优化方法来优化权重,直到准确率不再上升,迭代停止。在优化问题中,应用最广泛的是凸优化问题:
- 若可行域是凸集
- 且目标函数是一个凸函数
则这样的优化问题是凸优化问题
补充内容
仿射集 (affine set)
欧式空间 \(R^n\) 中的点集 \(M\),对于\(\forall x,y \in M\),以及 \(\forall \lambda\),总有:
则点集 \(M\) 是仿射集。
几何意义:仿射集的几何意义是:一个集合中任意两点的连线上的点仍然属于这个集合。(在三维空间内,整个坐标系才属于仿射集)
例:
- 三维欧氏空间 \(R^3\) 中,直线和平面都是仿射集,空集 \(\varnothing\) 也是仿射集
- \(S\) 是 \(R^n\) 中的子空间的充要条件是 \(S\) 是包含原点的仿射集
- 每一非空仿射集 \(S\) 都平行于唯一子空间 \(L\)
- 集合平移:\(S+p=\{ x+p|x \in S \}\)
- 非空仿射集 \(S\) 的维数是与它平行的子空间的维数,\(dim(S)\)
- 维数为 0,1,2 的仿射集就是熟知的点、线、面
- \(R^n\) 中的 \(n-1\) 维仿射集称为超平面 (hyperplane)
锥 (cone)
对于一个向量空间 \(V\) 与它的一个子集 \(C\),如果子集 \(C\) 中任意一点 \(x\) 与任意正数 \(a\)
,其乘积 \(ax\) 仍然属于子集 \(C\),则称 \(C\) 为一个锥。
锥总是无界的。
凸锥:锥 \(C\) 中任意两点 \(x\) 和 \(y\),\(ax+by \in C\quad(a,b>0)\)
- 凸锥首先是凸集
- 不是凸锥的锥,eg:\(y=|x|\),但是 \(y \ge |x|\) 就是凸锥
正定矩阵
- 对于 \(n*n\) 实对称矩阵: \(M\)满足任意非零实系数向量 \(x\),都有 \(x^TMx>0\),则 \(M\) 是正定的
- 对于复数矩阵:一个 \(n*n\) 的 \(Hermite\) 矩阵 \(M\) 是正定的当且仅当任意非零复向量 \(x\),都有 \(x^HMx>0\)。
- 前提要是 \(Hermite\) 矩阵,满足 \(M^H=M\)
隐函数求导
隐函数:如果方程 $F(x,y=0) $ 能确定 \(y\) 是 \(x\) 的函数,那么称这种函数表达方式为隐函数。(已知函数关系,不容易写出显函数形式)
- 表示成关于 \(y\) 的函数,链式求导
- 将待求导变量放到等式一边,等式两边同时求导
- 隐函数保存不变,直接对等式两边求导
方向导数与梯度
一维搜索的方法
Line Search (一维搜索,或线搜索、一维优化) 是最优化 (Optimization) 算法中的一个基础步骤,是求解一维目标函数 \(f(x)\) 最优解的过程。可以分为精确的一维搜素和不精确的一维搜素两大类。
当采用数学规划法寻求多元函数极值点时,一般需进行如下格式的迭代计算:$$x{k+1}=x+\alpha_ks^k(k=0,1,2,...)$$
当方向 \(s^k\) 给定,求最佳步长 \(\alpha_k\) 就是求一元函数:
的极值问题,这一过程被称为一维搜索
裴波那契法(Fibonacci法)
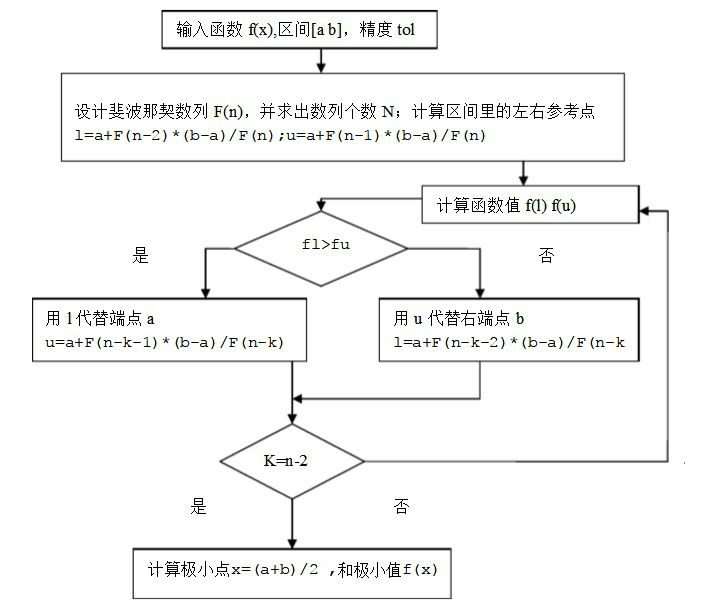
在区间 \([a,b]\) 内取两个不同点,算出函数值加以比较,逐步缩小搜索区间。
单峰函数
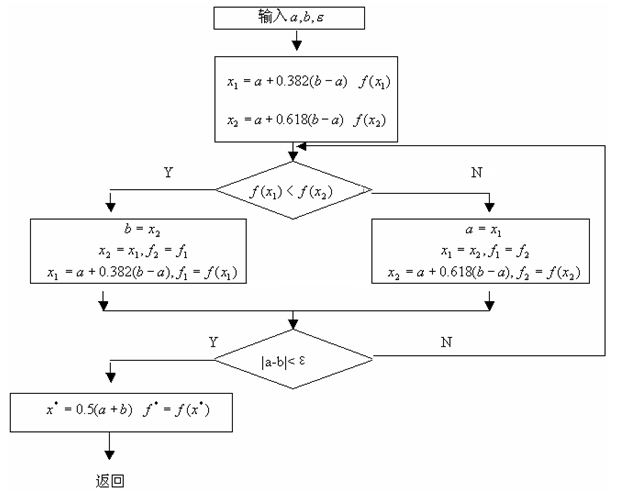
黄金分割法
牛顿法
切线是曲线的线性逼近
多次迭代后会越来越接近曲线的根
对于非线性函数 \(f(x)\),根据泰勒公式得到 \(x\) 附近某个点\(x_{k}\)展开的多项式可用来近似函数 \(f(x)\) 的值,该多项式对应的函数为 \(F(x)\),求得 \(F(x)\) 的极小值作为新的迭代点,然后继续在新的迭代点泰勒公式展开,直到求得的极小值满足一定的精度。
原理:
假设函数 \(f(x)\) 二次可微,则二阶泰勒展开:
\(g(x)\) 与 \(f(x)\) 近似,求函数 \(f(x)\) 的极值转化为求导函数为0,对 \(g(x)\) 求导并令等于0,
得:
得迭代公式:
代码:
def h(x):
return x*x*x + 2*x*x +3*x + 4
def h1(x):
return 3*x*x + 4*x + 3
def h2(x):
return 6*x + 4
xk = 0
k = 1
y = 0
e = 0.0001
times = 10000
while k < times:
y = h(xk)
a = h1(xk)
if abs(a) <= e:
break
b = h2(xk)
xk -= a/b
k += +1
print("k = ", k)
print("x = ", xk)
print("y = ", y)


 浙公网安备 33010602011771号
浙公网安备 33010602011771号