第八周物理实验:用扭摆法测量物体的转动惯量
用扭摆法测量物体的转动惯量预习报告
一、实验目的
-
深入理解转动惯量的物理意义,明确其与物体质量分布、形状及转轴位置的依赖关系,掌握转动惯量的基本概念和相关特性。
-
熟悉扭摆的构造原理和工作方式,学会正确组装、调试扭摆实验装置,掌握实验仪器的基本操作方法。
-
掌握用扭摆法测量不同形状物体(如圆盘、圆环、球体等)转动惯量的实验原理和具体步骤,能够独立完成实验数据的测量。
-
学习使用秒表(或光电计时器)等计时仪器精确测量扭摆的振动周期,掌握数据处理的基本方法,包括计算转动惯量的数值、不确定度分析等,培养严谨的实验数据处理能力。
-
验证转动惯量的平行轴定理,通过实验数据验证当物体绕不同平行轴转动时,其转动惯量之间的关系,加深对理论知识的理解和应用。
二、实验仪器
- 扭摆及其辅材
- ZG-2转动惯量周期测定仪。0.01s精度
- DJ2000A型电子天平,0.1g分度值
- 游标卡尺、钢板尺等
三、实验原理
1. 扭摆的简谐振动规律
当扭摆的载物台带动物体绕扭丝轴线转过一个微小角度\(\theta\)时,扭丝会产生一个恢复力矩\(M\)。根据胡克定律,在弹性限度内,恢复力矩的大小与扭转角度成正比,方向与角位移方向相反,即:
\(M = -K\theta\)
其中,\(K\)为扭丝的扭转常数(单位:\(\text{N·m/rad}\)),负号表示恢复力矩与角位移方向相反。
根据刚体的转动定律\(M = I_0\beta\)(其中\(I_0\)为系统(包括载物台和待测量物体)的总转动惯量,\(\beta\)为角加速度),将恢复力矩代入可得:
\(I_0\beta = -K\theta\)
由于角加速度\(\beta = \frac{d^2\theta}{dt^2}\),代入上式可得到扭摆系统的振动微分方程:
\(\frac{d^2\theta}{dt^2} + \frac{K}{I_0}\theta = 0\)
该方程为典型的简谐振动微分方程,其通解形式为\(\theta = A\cos(\omega t + \varphi)\)(其中\(A\)为角振幅,\(\omega\)为角频率,\(\varphi\)为初相位)。对比简谐振动的标准微分方程\(\frac{d^2\theta}{dt^2} + \omega^2\theta = 0\),可得系统的角频率为:
\(\omega = \sqrt{\frac{K}{I_0}} \)
由于简谐振动的周期\(T\)与角频率\(\omega\)的关系为\(\omega = \frac{2\pi}{T}\),将其代入上式,可推导出扭摆系统的振动周期公式:
\(T = 2\pi\sqrt{\frac{I_0}{K}}\)
进一步整理可得系统总转动惯量的表达式:
\(I_0 = \frac{K T^2}{4\pi^2} \quad (1) \)
2. 扭转常数\(K\)的校准
公式 (1) 中,扭转常数\(K\)是扭丝的固有属性,需通过实验校准。实验中通常采用已知转动惯量的标准物体(如标准圆柱体)来校准\(K\)。
设载物台的转动惯量为\(I_{\text{台}}\),当将一个质量为\(m_1\)、直径为\(d_1\)的标准圆柱体放在载物台中心时,圆柱体的转动惯量(绕通过其中心且垂直于端面的轴)为:
\(I_{\text{柱}} = \frac{1}{8}m_1 d_1^2\)
此时系统(载物台 + 标准圆柱体)的总转动惯量为\(I_1 = I_{\text{台}} + I_{\text{柱}}\),对应的振动周期为\(T_1\),根据公式 (1) 可得:
\(I_{\text{台}} + I_{\text{柱}} = \frac{K T_1^2}{4\pi^2} \quad (2)\)
若仅将载物台安装在扭摆上,测得其振动周期为\(T_0\),则载物台的转动惯量为:
\(I_{\text{台}} = \frac{K T_0^2}{4\pi^2} \quad (3)\)
将公式 (3) 代入公式 (2),消去\(I_{\text{台}}\)后整理可得扭转常数\(K\)的表达式:
\(K = \frac{4\pi^2 I_{\text{柱}}}{T_1^2 - T_0^2}\)
将\(I_{\text{柱}} = \frac{1}{8}m_1 d_1^2\)代入,即可通过测量\(m_1\)、\(d_1\)、\(T_0\)和\(T_1\)计算出扭转常数\(K\)。
3. 待测量物体转动惯量的测量
校准得到扭转常数\(K\)后,即可测量其他待测量物体的转动惯量。以测量圆盘为例,设圆盘的质量为\(m_2\)、直径为\(d_2\),将其放在载物台中心,测得系统(载物台 + 圆盘)的振动周期为\(T_2\),则系统总转动惯量为:
\(I_2 = \frac{K T_2^2}{4\pi^2}\)
根据转动惯量的叠加原理,圆盘的转动惯量\(I_{\text{盘}}\)为系统总转动惯量减去载物台的转动惯量\(I_{\text{台}}\),即:
\(I_{\text{盘}} = I_2 - I_{\text{台}} = \frac{K}{4\pi^2}(T_2^2 - T_0^2)\)
同理,对于圆环(质量\(m_3\)、内直径\(d_{3\text{内}}\)、外直径\(d_{3\text{外}}\)),其理论转动惯量为\(I_{\text{环理论}} = \frac{1}{8}m_3(d_{3\text{外}}^2 + d_{3\text{内}}^2)\),实验测量时,只需测得系统(载物台 + 圆环)的振动周期\(T_3\),即可通过\(I_{\text{环实验}} = \frac{K}{4\pi^2}(T_3^2 - T_0^2)\)计算出实验值,并与理论值比较,分析实验误差。
4. 平行轴定理的验证
平行轴定理指出:刚体绕任意轴的转动惯量\(I\),等于该刚体绕通过其质心且与该轴平行的轴的转动惯量\(I_c\),加上刚体质量\(m\)与两轴之间距离\(x\)平方的乘积,即:
\(I = I_c + m x^2\)
为验证该定理,可选择金属细杆进行实验。设细杆的质量为\(m_4\)、长度为\(L\),其绕通过质心且垂直于杆的轴的理论转动惯量为\(I_{\text{杆}c\text{理论}} = \frac{1}{12}m_4 L^2\)。
将细杆两端对称地固定在载物台的两侧支架上,使细杆的质心与扭丝轴线的距离为\(x\)(可通过调整支架位置改变\(x\))。此时细杆绕扭丝轴线的理论转动惯量为\(I_{\text{杆理论}} = I_{\text{杆}c\text{理论}} + m_4 x^2\)。
实验中,测得系统(载物台 + 细杆)的振动周期\(T_4\),则细杆的实验转动惯量为\(I_{\text{杆实验}} = \frac{K}{4\pi^2}(T_4^2 - T_0^2)\)。通过改变不同的\(x\)值,分别测量对应的\(I_{\text{杆实验}}\),并与理论值\(I_{\text{杆理论}}\)比较,若两者在误差范围内一致,则可验证平行轴定理的正确性。
5. 实验数据
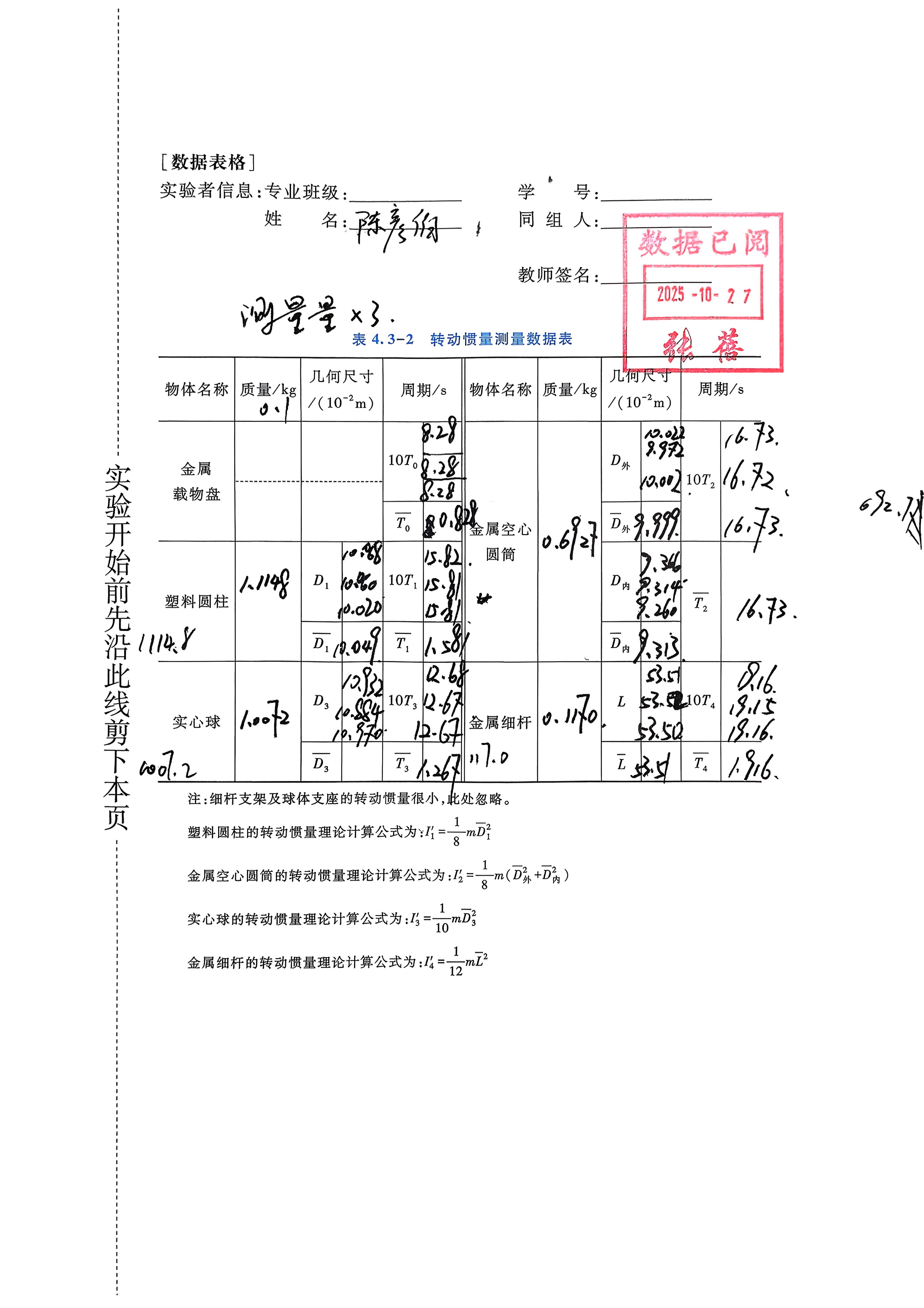
6. 数据处理与分析
一、标定扭转常量 K 与装置本底转动惯量 I₀
空载周期 T₀ = 0.828 s
塑料圆柱:m₁ = 1.1148 kg,D₁ = 10.049×10⁻² m,T₁ = 1.581 s
理论转动惯量:
由周期关系:
计算得:
二、各被测物体的转动惯量
通用公式:
| 物体 | 公式(理论) | 理论值/kg·m² | 实验值/kg·m² | 相对差 |
|---|---|---|---|---|
| 塑料圆柱 | $$ I'=\frac{1}{8}mD^2 $$ | 1.407×10⁻³ | 1.407×10⁻³ | 0.00% |
| 实心球 | $$ I'=\frac{1}{10}mD^2 $$ | 1.203×10⁻³ | 7.135×10⁻⁴ | −40.7% |
| 空心圆筒 | $$ I'=\frac{1}{8}m(D_o^2+D_i^2) $$ | 1.617×10⁻³ | 1.639×10⁻³ | +1.41% |
| 细杆(中垂轴) | $$ I'=\frac{1}{12}mL^2 $$ | 2.792×10⁻³ | 2.316×10⁻³ | −17.0% |
三、平行轴定理验证实验
滑块参数:
mₛ = 0.2412 kg,Dₒ = 0.03510 m,Dᵢ = 0.00590 m
滑块自身转动惯量:\[I_c = \frac{1}{8}m_s(D_o^2 + D_i^2) = 3.81946\times10^{-5}\ \text{kg·m}^2 \]
若滑块对称放置于细杆两端距中心 X 处,则
且
| X/m | T/s | $$ I_{\text{tot}} = \frac{K T^2}{4\pi^2} $$ (kg·m²) |
|---|---|---|
| 0.050 | 2.310 | 0.004139 |
| 0.100 | 3.170 | 0.007795 |
| 0.150 | 4.231 | 0.013887 |
| 0.200 | 5.379 | 0.022445 |
线性拟合:
计算得:
理论期望:
对比结果:
斜率相对差 ≈ +1.2%
截距相对差 ≈ −0.35%
实验与平行轴定理符合良好。
四、实验总结
- 扭转常量 K = 3.06×10⁻² N·m·rad⁻¹
- 装置本底转动惯量 I₀ = 5.32×10⁻⁴ kg·m²
- 空心圆筒与标定物结果最为接近;球体和细杆误差较大。
- 平行轴定理验证斜率、截距误差均小于 2%,实验可信度高。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号