SLAM面试官:看你简历上写精通VINS,麻烦现场手推一下预积分!
2021-11-05 21:32 计算机视觉life 阅读(1527) 评论(0) 收藏 举报原文链接:SLAM面试官:看你简历上写精通VINS,麻烦现场手推一下预积分!
有同学面试SLAM算法岗位时,简历里写精通VINS,结果穿着格子衫的面试官突然来了兴致,一手捋着头顶稀疏的头发,一手递过来纸和笔,和蔼可亲的说:同学,看你简历上写精通VINS Mono/Fusion,想必对其中公式推导和代码非常熟悉,麻烦先手推一下预积分吧!待会我们来 讨论下代码的细节!
One thousand years later ...
从此以后,该同学简历上再也没有出现过那两个字:精通

以上各位读者可以作为一个段子,哈哈一笑。不过VINS原理推导的复杂及代码的庞大确实让很多新手望而却步、步步惊心、心有余悸、继续搬砖。
那VINS到底是啥呢?
关于VINS-Mono和Fusion
VINS即Visual-Inertial navigation Systems,是视觉惯性导航系统的统称,不过我们平时所说的一般是指VINS-Mono/Fusion。香港科技大学飞行机器人实验室(沈邵劼团队)在2018年开源了VINS-Mono算法。第一作者秦通(2019华为天才少年),该论文获2018年机器人顶级期刊IEEE Transactions on Robotics最佳论文奖。它用一个单目相机+惯性测量单元(Inertial Measurement Unit,简称IMU)实现了紧耦合的视觉和惯性联合状态估计,在保证高精度里程计效果的同时,还可以同时估计出传感器外参,IMU零偏以及传感器时延。2019年该团队开源了VINS-Mono的升级版VINS-Fusion,它支持多种视觉惯性传感器类型,包括单目+IMU,双目+IMU,以及纯双目。VINS-Mono和VINS-Fusion在当年一骑绝尘,是非常经典且优秀的VIO框架。
以下是VINS-Mono效果展示,它在室内环境下的SLAM效果如下:
在室外大尺度效果也非常鲁棒,以下是它在香港科技大学操场的SLAM效果:
对于高速飞行的无人机,它同样保持了非常高精度. 高稳定性的SLAM效果:
在手机AR上应用,该算法完胜当前最先进的Google Tango效果如下:
以下是VINS-Fusion在汽车SLAM上的效果:
为什么要学习VINS-Mono/Fusion?
在自动驾驶、无人机、增强现实、机器人导航等领域的技术栈中,定位和建图(SLAM)在其中发挥着不可或缺的作用,目前SLAM算法越来越倾向于多传感器融合方案,而其中理论最为复杂的当属视觉惯性里程计(Visual-Inertial Odometry,简称VIO),因此,对VIO的掌握能力将很大程度决定了一个SLAM从业者的上限。而VINS Mono/Fusion 是VIO中最优秀的算法之一。
计算机视觉life 经过长时间筹备,重磅推出 《VINS Mono+Fusion 手推公式 + 源码解析课程》,帮助从业者快速入门,掌握核心算法,扎实看懂每行代码,学完后能马上学以致用。
前100名购买,优惠100元!微信扫描学习↓
以下是讲师详细注释的代码地址:
https://github.com/xieqi1/VINS-Mono-noted
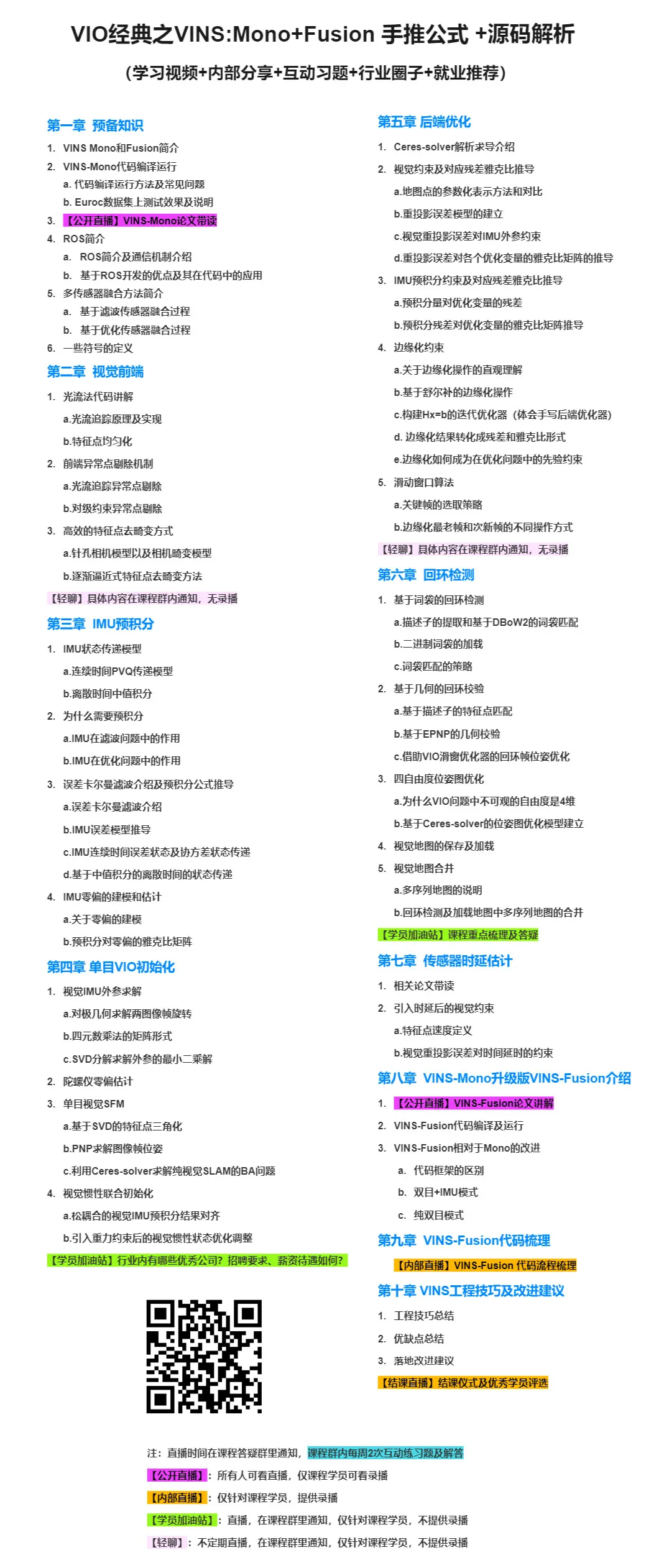
课程大纲如下
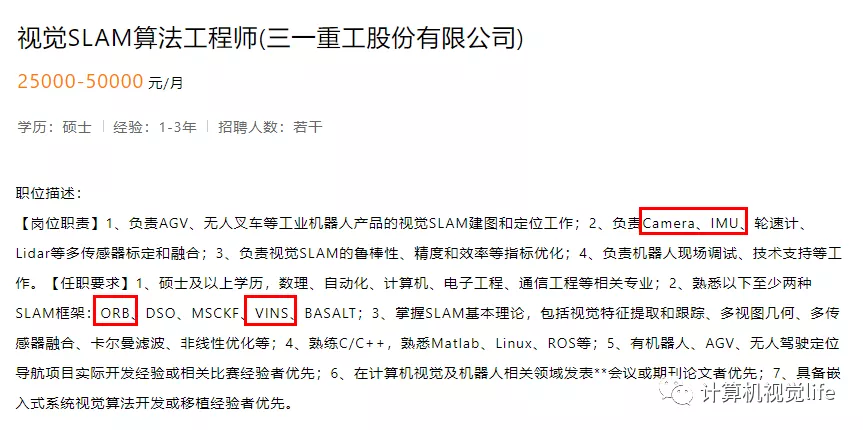
VINS相关岗位及薪资
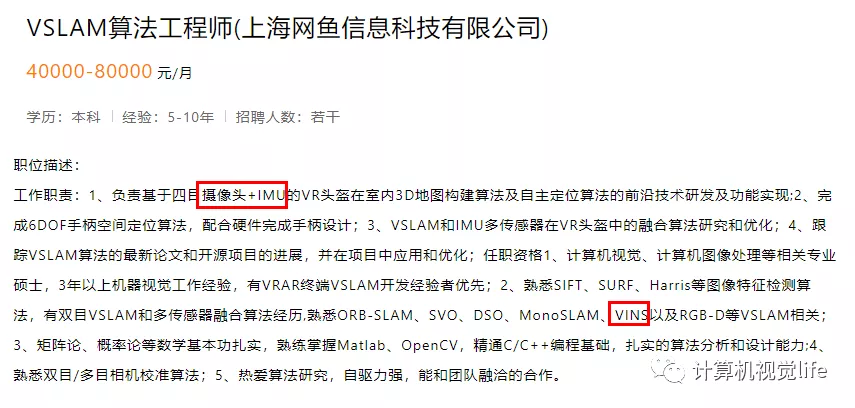
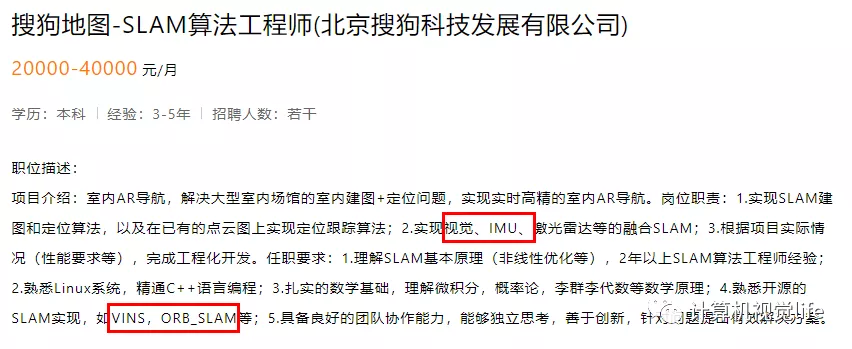
VINS-Mono/Fusion是VIO中最优秀算法之一,它广泛应用于自动驾驶、无人机、增强现实、机器人导航等领域,对VIO的掌握能力将很大程度决定了一个SLAM从业者的上限。下面的岗位中,用人单位招聘时明确要求掌握VINS算法:
VINS课程介绍
独家课程:《VINS Mono+Fusion 手推公式 + 源码解析课程》优点
-
我们从源码出发,逐行解析详细注释的源码,从最底层揭开涉及到的所有理论和代码中的工程化技巧。
-
所有涉及到的重要公式,全部白板从零推导,你将看到这些复杂的公式是如何从最简单的原理一步一步形成。
-
通过代码逐行解析+公式白板推导,将最大程度上帮助你掌握VIO的核心知识,并且具备举一反三的能力,对其他多传感器融合算法的理解将更为深刻。
开课时间及说明
-
11月26日开课,课程时长3个月,总共60+视频。每周五更新,不管何时购买,课程观看有效期截止到2023年1月1日。越早买享受越长的课程观看时间!
-
支持手机、电脑、H5页面观看。为了保证课程质量,大部分内容都是录播 。我们也在开课到结课期间安排了多次直播,总之 就是录播+直播+课程群答疑的形式。
-
课程购买后可开发票,请咨询课程助手。
-
如果想真正搞懂VINS-Mono+Fusion 的方方面面,不要犹豫,目前没有比我们的课程更实用、更细致、更有性价比的同类竞品。
前100名购买,预售优惠100!微信扫描学习↓
优惠券链接:https://mp.weixin.qq.com/s?__biz=MzIxOTczOTM4NA==&mid=2247531899&idx=1&sn=c3a74792cf3488189f7bbb0c6fe40d6d&chksm=97d498eca0a311faf1d260ca1444dc7e3c87e3cf1391641761317ba25c05737d923c07fe66a0&token=891049623&lang=zh_CN#rd
如果对课程有疑问,可加下面微信咨询↓
请备注: 咨询VINS,无备注可能不通过
琪宝,硕士毕业于985高校。目前就职于顶级自动驾驶公司,担任高级SLAM算法工程师。有4年以上SLAM、多传感器融合项目经历,参与多项JD机器人和自动驾驶技术落地。熟悉视觉/激光/多传感器融合SLAM。讲师功底扎实,善于白板从零手推公式,代码粉碎机,帮助学员嚼碎消化每行代码。讲师详细注释的代码地址:
https://github.com/xieqi1/VINS-Mono-noted
https://github.com/xieqi1/lio-sam-noted
该讲师目前还有课程:重磅来袭!基于LiDAR的多传感器融合SLAM 系列教程:LOAM、LeGO-LOAM、LIO-SAM
为什么学习该课程?
-
自动驾驶、AR、机器人、无人机等领域对VIO算法非常刚需,而以VINS-Mono/Fusion为代表的VIO算法是其中最具代表性的方法之一,人才需求量大并且十分紧缺。
-
本课程延续我们一贯的学以致用风格,原理剖析+逐行代码精讲,带领学员从零开始学习源码,并讲解算法落地的工程实践技巧,理论与实践并重,快速掌握宝贵的工程经验。
-
VINS涉及预积分、后端优化等大量的公式推导,初学者需要花费大量时间也难以入门。本课程所有涉及到的公式,全部白板从零手动推导,你将看到这些复杂的公式是如何从最简单的原理一步一步形成。
-
讲师为国内顶级自动驾驶公司资深SLAM算法工程师,亲自对源码进行超详细注释,对于编程基础差的同学帮助极大。
学完课程可以掌握哪些技能?
-
从零开始学习VINS,涉及到的公式全部手写白板从零推导,掌握:光流前端、IMU预积分推导、误差卡尔曼滤波、视觉惯性联合初始化、边缘化约束、滑动窗口BA、闭环检测、多地图合并、地图重载、传感器时延估计等核心算法。具备扎实的VIO理论基础,具备举一反三能力,对其他多传感器融合算法理解将更深刻。
-
从头开始源码逐行讲解,理解上述原理如何在代码中具体实现,掌握代码中的工程实践技巧,彻底打通原理及底层源码实现,具备项目实战经验与工程研发能力。
-
掌握ROS、Ceres Solver、DBOW2等经典、必备的工具,提升实践能力。
-
学完本门课程,学员可以达到工作1-2年的SLAM算法工程师水平。
该课程适合谁?
-
1、想要快速入门的高年级本科生、硕士及博士研究生,有项目需求或者想要拓展相关知识领域的算法工程师。
-
3、理工科专业,具有一定的C++基础。
-
4、应用领域:增强现实(AR)、混合现实(MR)、机器人导航、自动驾驶等。
课程运行环境及基础
1.运行环境:Ubuntu16.04/18.04
2.硬件要求:普通台式机/笔记本电脑均可,无需GPU。课程使用公开数据集,无需硬件平台、相机传感器等硬件。
3.编程语言:C++
4.要求基础:了解C++基础语法。以下三者满足其一:认真学习过《视觉SLAM十四讲》、计算机视觉life ORB-SLAM2或ORB-SLAM3课程、系统阅读过其他主流SLAM开源代码。
课程价格及优惠
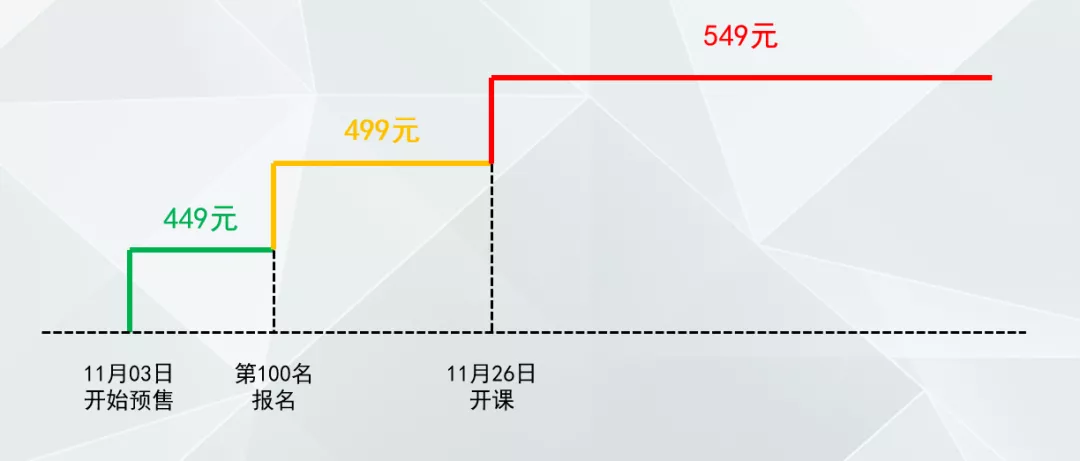
课程采取阶梯定价,越早买越优惠!如下图所示
前100名购买在原价基础立减 100元;
第101名到开课之前在原价基础立减50元;
此外,我们根据用户消费记录发放不同金额的优惠券。总共4档优惠券,已经发放到学员账户。
VIP1:累计消费金额 ≤599且至少购买过一门课程 或 知识星球成员,额外发放20元优惠券
VIP2:累计消费金额 600-999,额外发放30元优惠券
VIP3:累计消费金额 1000-1999,额外发放50元优惠券
VIP4:累计消费金额 ≥2000,额外发放80元优惠券
优惠券还可叠加店铺积分使用,20积分=1元
所以老用户可享受:秒杀优惠+额外优惠券+积分抵现,triple kill!
注意:累计消费金额由后台系统自动计算生成,系统无法累计来自旧店铺以及通过其他途径(如支付宝)支付的订单。优惠券发放标准统计截止到11月2日,之后不再额外发放。敬请谅解。
课程独家注释代码说明
以下是讲师详细注释的代码地址:
https://github.com/xieqi1/VINS-Mono-noted
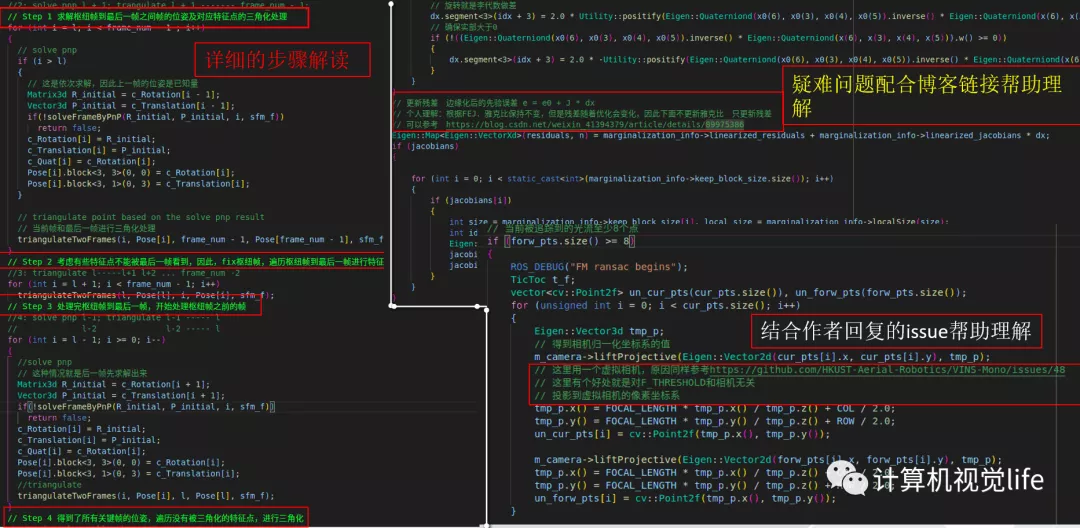
注释的代码其中包括但不限于
1、详细的步骤解读
2、对疑难问题配合博客链接帮助理解
3、结合作者回复的issue帮助理解
如下图所示:
为了让学员深刻了解VINS背后的原理,我们花费了大量时间准备,对于所涉及到的重要公式,全部白板从零手动推导,你将看到这些复杂的公式是如何从最简单的原理一步一步得到的,这种方式相对于直接播放PPT虽然麻烦,但是极大帮助了学员真正掌握其原理,这是我们独家的优势!如下所示

前100名购买,预售优惠100!微信扫描学习↓
如果对课程有疑问,可加下面微信咨询↓
请备注: 咨询VINS,无备注可能不通过
点击阅读原文也可购买↓

 浙公网安备 33010602011771号
浙公网安备 33010602011771号