



LRN(local response normalization--局部响应标准化)
LRN全称为Local Response Normalization,即局部响应归一化层,LRN函数类似DROPOUT和数据增强作为relu激励之后防止数据过拟合而提出的一种处理方法。这个函数很少使用,基本上被类似DROPOUT这样的方法取代,见最早的出处AlexNet论文对它的定义, 《ImageNet Classification with Deep ConvolutionalNeural Networks》
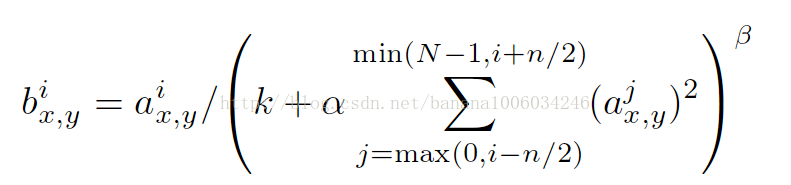
i:代表下标,你要计算像素值的下标,从0计算起
j:平方累加索引,代表从j~i的像素值平方求和
x,y:像素的位置,公式中用不到
a:代表feature map里面的 i 对应像素的具体值
N:每个feature map里面最内层向量的列数
k:超参数,由原型中的blas指定
α:超参数,由原型中的alpha指定
n/2:超参数,由原型中的deepth_radius指定
β:超参数,由原型中的belta指定
背景知识:
tensorflow官方文档中的tf.nn.lrn函数给出了局部响应归一化的论文出处 ,详见http://papers.nips.cc/paper/4824-imagenet-classification-with-deep-convolutional-neural-networks
为什么要有局部响应归一化(Local Response Normalization)?详见http://blog.csdn.net/hduxiejun/article/details/70570086
tensorflow中调用:
看一个栗子,理解上诉的参数,进而理解rln函数
import tensorflow as tf a = tf.constant([ [[1.0, 2.0, 3.0, 4.0], [5.0, 6.0, 7.0, 8.0], [8.0, 7.0, 6.0, 5.0], [4.0, 3.0, 2.0, 1.0]], [[4.0, 3.0, 2.0, 1.0], [8.0, 7.0, 6.0, 5.0], [1.0, 2.0, 3.0, 4.0], [5.0, 6.0, 7.0, 8.0]] ]) #reshape 1批次 2x2x8的feature map a = tf.reshape(a, [1, 2, 2, 8]) normal_a=tf.nn.lrn(a,2,0,1,1) with tf.Session() as sess: print("feature map:") image = sess.run(a) print (image) print("normalized feature map:") normal = sess.run(normal_a) print (normal)
你将得到输出:
feature map: [[[[ 1. 2. 3. 4. 5. 6. 7. 8.] [ 8. 7. 6. 5. 4. 3. 2. 1.]] [[ 4. 3. 2. 1. 8. 7. 6. 5.] [ 1. 2. 3. 4. 5. 6. 7. 8.]]]] normalized feature map: [[[[ 0.07142857 0.06666667 0.05454545 0.04444445 0.03703704 0.03157895 0.04022989 0.05369128] [ 0.05369128 0.04022989 0.03157895 0.03703704 0.04444445 0.05454545 0.06666667 0.07142857]] [[ 0.13793103 0.10000001 0.0212766 0.00787402 0.05194805 0.04 0.03448276 0.04545454] [ 0.07142857 0.06666667 0.05454545 0.04444445 0.03703704 0.03157895 0.04022989 0.05369128]]]]
分析如下:
由调用关系得出 n/2=2,k=0,α=1,β=1,N=8
第一行第一个数来说:i = 0
a = 1,min(N-1, i+n/2) = min(7, 2)=2,j = max(0, i - k)=max(0, 0)=0,下标从0~2个数平方求和, b=1/(1^2 + 2^2 + 3^2)=1/14 = 0.071428571
同理,第一行第四个数来说:i = 3
a = 4,min(N-1, i+n/2) = min(7, 5 )=5, j = max(0,1) = 1,下标从1~5进行平方求和,b = 4/(2^2 + 3^2 + 4^2 + 5^2 + 6^2) = 4/90=0.044444444
再来一个,第二行第一个数来说: i = 0
a = 8, min(N-1, i+n/2) = min(7, 2) = 2, j=max(0,0)=0, 下标从0~2的3个数平方求和,b = 8/(8^2 + 7^2 + 6^2)=8/149=0.053691275
其他的也是类似操作
ps:
1、AlexNet将LeNet的思想发扬光大,把CNN的基本原理应用到了很深很宽的网络中。AlexNet主要使用到的新技术点如下:
(1)成功使用ReLU作为CNN的激活函数,并验证其效果在较深的网络超过了Sigmoid,成功解决了Sigmoid在网络较深时的梯度弥散问题。虽然ReLU激活函数在很久之前就被提出了,但是直到AlexNet的出现才将其发扬光大。
(2)训练时使用Dropout随机忽略一部分神经元,以避免模型过拟合。Dropout虽有单独的论文论述,但是AlexNet将其实用化,通过实践证实了它的效果。在AlexNet中主要是最后几个全连接层使用了Dropout。
(3)在CNN中使用重叠的最大池化。此前CNN中普遍使用平均池化,AlexNet全部使用最大池化,避免平均池化的模糊化效果。并且AlexNet中提出让步长比池化核的尺寸小,这样池化层的输出之间会有重叠和覆盖,提升了特征的丰富性。
(4)提出了LRN层,对局部神经元的活动创建竞争机制,使得其中响应比较大的值变得相对更大,并抑制其他反馈较小的神经元,增强了模型的泛化能力。
2、为什么输入数据需要归一化(Normalized Data)?
归一化后有什么好处呢?原因在于神经网络学习过程本质就是为了学习数据分布,一旦训练数据与测试数据的分布不同,那么网络的泛化能力也大大降低;另外一方面,一旦每批训练数据的分布各不相同(batch 梯度下降),那么网络就要在每次迭代都去学习适应不同的分布,这样将会大大降低网络的训练速度,这也正是为什么我们需要对数据都要做一个归一化预处理的原因。
对于深度网络的训练是一个复杂的过程,只要网络的前面几层发生微小的改变,那么后面几层就会被累积放大下去。一旦网络某一层的输入数据的分布发生改变,那么这一层网络就需要去适应学习这个新的数据分布,所以如果训练过程中,训练数据的分布一直在发生变化,那么将会影响网络的训练速度。
参考文献:
https://blog.csdn.net/banana1006034246/article/details/75204013
https://blog.csdn.net/u011204487/article/details/76026537
https://blog.csdn.net/yangdashi888/article/details/77918311

 浙公网安备 33010602011771号
浙公网安备 33010602011771号