Boost 矩形布尔运算
本文主要介绍boost库中矩形布尔运算的思路和代码解析。在此感谢Intel对开源事业的贡献。
基本概念
图形的插入
所有的操作的第一步都是进行图形的插入,我们需要声明定义好我们要使用的图形类型,以矩形为例,方式为:
rectangle_data(T xl, T yl, T xh, T yh)
实例如下:
ps1.insert(rectangle_data
ps2.insert(rectangle_data
xl, yl, xh, yh分别为x最小值,y最小值,x最大值,y最大值。分别为矩形的右下角左边和左上角坐标。
顶点与多边形的转化——微分
在Boost算法中,一个基本的实现逻辑是通过计算多边形的导数来代表多边形的x和y坐标点变化
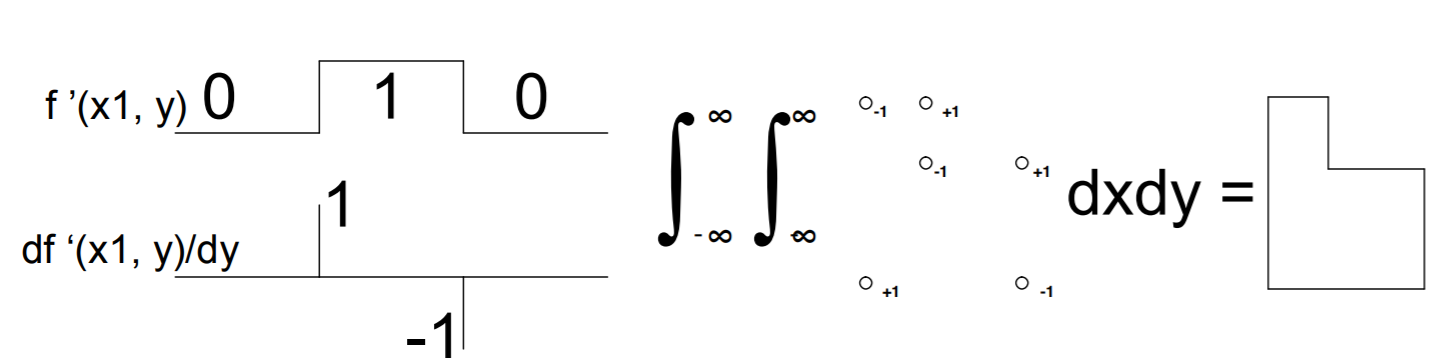
在对矩形的端点进行导数计算后,从左到右扫描所有矩形的点y坐标形成的竖直区间,对于矩形,竖直区间导数值等于下端点的导数值。 在代码实现上,boost并不真的求导,而只是按顺序分配,给四个顶点以1和-1的值,以加快运行速度。
从左到右扫描所有矩形的点形成的区间,累加导数值,记录为count,来判断是否应该将该区间加入结果中。
假设有n个矩形进行布尔运算,那么设立一个长度为n的数组count,count[i]代表第i个矩形。布尔运算完成之后的图形设为 Result。扫描的方式是从左到右进行扫描。
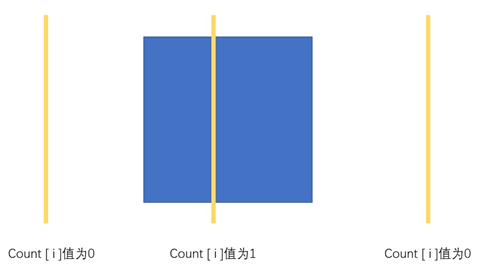
计算加入区间ivl前总体状态值before和加入ivl之后after。对于不同的布尔运算,总体状态值的计算方式也不一致。
1.对于或运算,从count[0]和count[1]任一值为1,就能计算出当前总体状态值为true。
2.对于与运算,就需要从count[0]和count[1]所有值全为1,才能计算出当前总体状态值为true。
总体状态值before或after等于true,那么代表位于Result内部。
等于false自然代表位于Result外部。
显然对于一个区间,加入他前后如果都在Result内部,或者都在Result外部,这个区间就不是Result的边。反之,如果由内到外或者由外到内,这个区间就是Result的边,应该加入结果中。
布尔运算代码详解
首先声明矩形,方式为
rectangle_data(T xl, T yl, T xh, T yh)
xl, yl, xh, yh分别为x最小值,y最小值,x最大值,y最大值。
定义三个矩形集合ps1, ps2和ps_tmp。
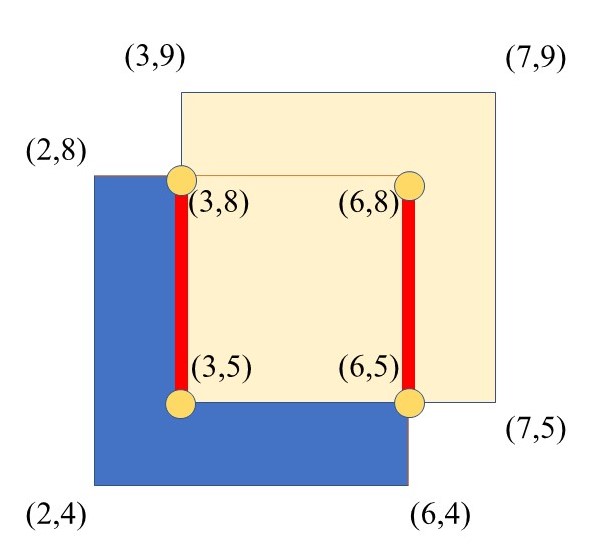
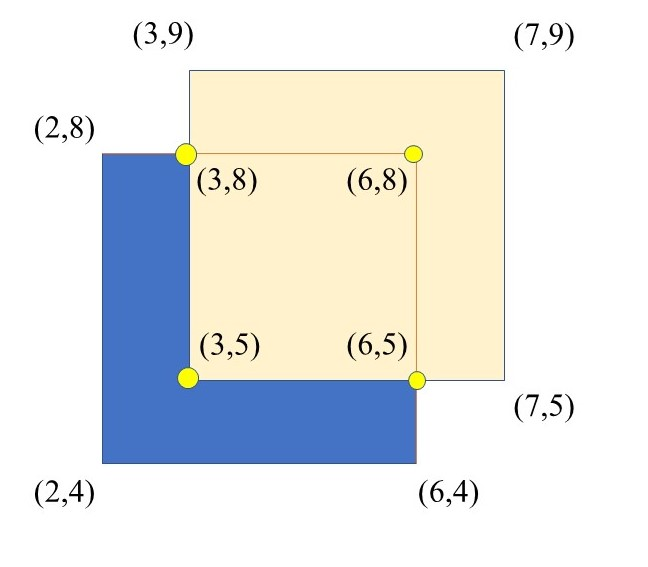
ps1内包含一个值为(3,5,7,9)的矩形, ps2包含一个值为(2,4,6,8)的矩形,ps_tmp保存结果。
做布尔与运算
ps_tmp=ps1*ps2
通过重载操作符*的形式,进入布尔运算流程。
polygon_90_set_view<geometry_type_1, geometry_type_2, boolean_op::BinaryAnd>
(
lvalue,
rvalue,
polygon_90_set_traits<geometry_type_1>::orient(lvalue),
boolean_op::BinaryAnd()
);
lvalue即ps1, rvalue即ps2。
初始化
数据类型介绍:
-
interval_data:区间数据,用于扫描线。 -
polygon中端点数据结构形如:
(first,(second.first,second.second))first存储端点的x值,second.first存储端点的y值,second.second存储端点的导数值。
有几个变量需要得到初始化:
orient:方向。每个 polygon_90_set_data 都有,默认为1.data_:保存着端点的数据。
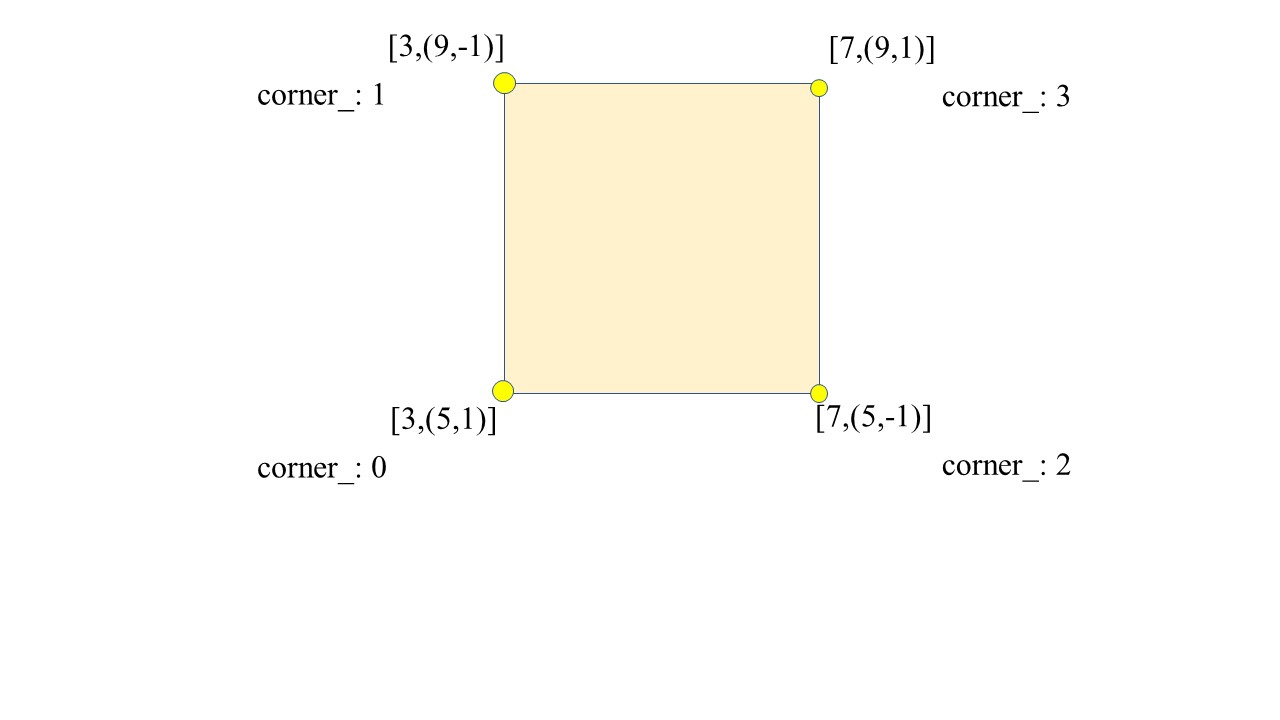
data_的初始化在insert时就已经完成,首先默认如下图所示。标记各个顶点,标记名为corner_,值为0,1,2,3(矩形条件下)。按照0,1,2,3的顺序依次标记各个点的导数值为1,-1,-1,1。需要注意的是在有hole的情况下,导数值会发生变化。具体执行函数位于iterator_geometry_to_set.hpp 52行 inline reference operator*()处。
compute_90_set_value
计算首先在名为 compute_90_set_value 的结构体中进行。将ps1,ps2分别作为lvalue_和rvalue_传入。
假如ps1和ps2的orient(方向)相同,那么:
- 对ps1和ps2均进行端点sort。先按x坐标升序排序,若x坐标相同,再按y坐标升序排序。如下图所示,ps1排序后顶点顺序为(3,5),(3,9),(7,5),(7,9)。
调用
output_.applyBooleanBinaryOp
(
lvalue_.begin(), lvalue_.end(),
rvalue_.begin(), rvalue_.end(),
boolean_op::BinaryCount<op_type>()
);
进入applyBooleanBinaryOp函数。
applyBooleanBinaryOp
变量介绍:
itr1:迭代器。用于ps1遍历。itr2:迭代器。用于ps2遍历。output:布尔运算得到的结果。container: vector类型。保存着每次计算得到的结果。其中元素类型为
pair<interval_data<Unit>, int>curCoord:记录当前x值。curPosition:记录当前y值。curCount:curCount[0]记录当前区间的属于ps1的端点导数值,curCount[1]记录当前区间的属于ps2的端点导数值。prevCoord:前一个被处理的点的x值。prevPosition:前一个被处理的点的y值。count:累加所有已处理的区间的下端点的导数值。
遍历ps1和ps2中的所有点,当他们都未被遍历完时:
-
选择itr1和itr2之中x值更小的点。使curCoord为其x值,curPosition为对应的y值。curCoount=defaultCount。如果选择itr1,curCount[0]加上itr1的导数值。否则,curCount[1]加上itr2的count值。
-
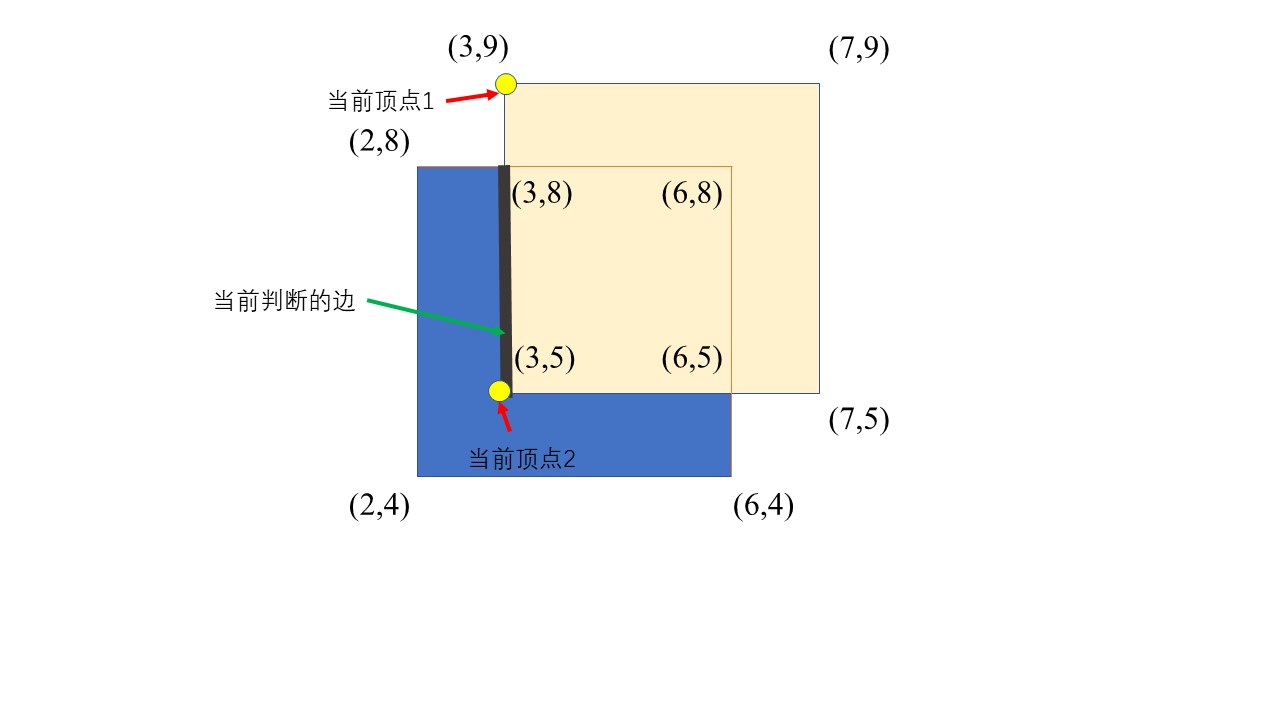
如果prevCoord!=curCoord。即两个端点的x值不一致,不能形成一条竖直方向的扫描线区间。不再进行后续处理,直接进行下次循环。调用advanceScan函数使scanData迭代器回到
scanData.begin(),并直接更新prevCoord,prevPosition,count。如下图所示,当前一点为(2,8),现端点为(3,5)时,二者不在同一竖直线上,不再进行后续处理。
-
否则,继续处理。声明并定义变量ivl。ivl的下界为prevPosition,上界为curPosition。
-
清理container为空。
-
调用
boolean.processInterval(container, ivl, count)进行区间的处理和计算,将结果加入container中。 -
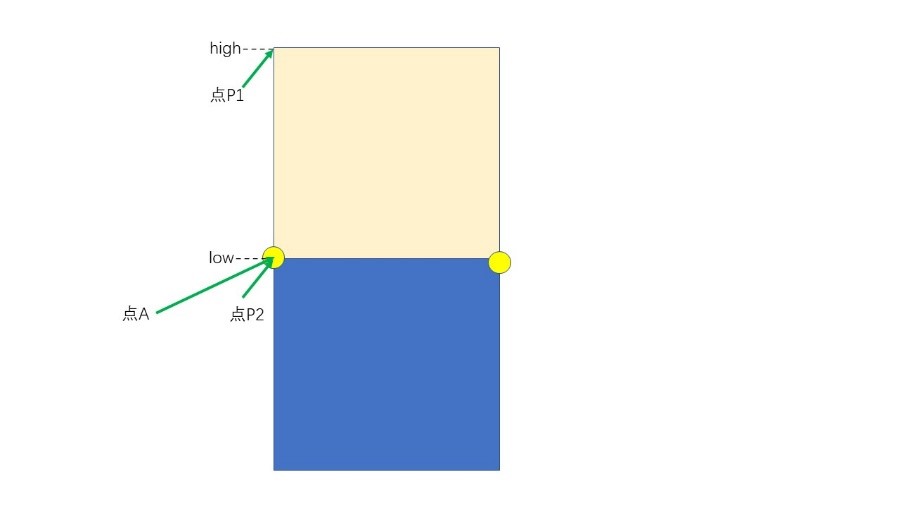
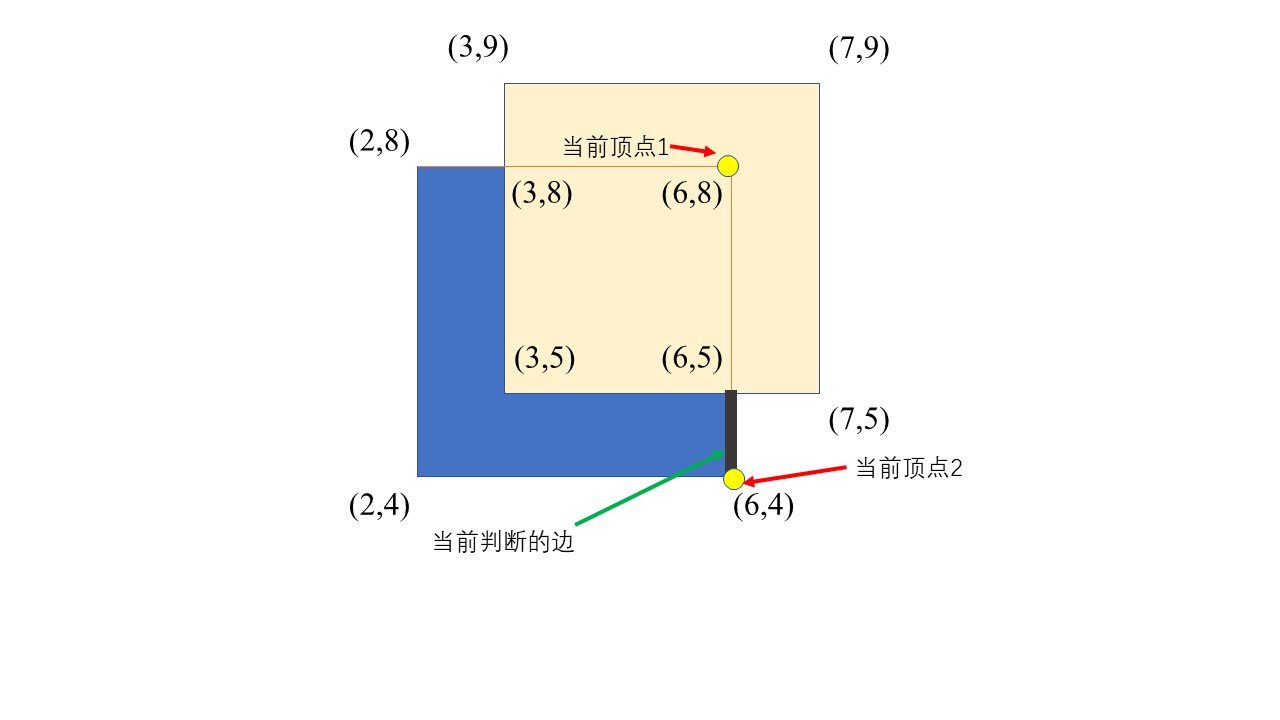
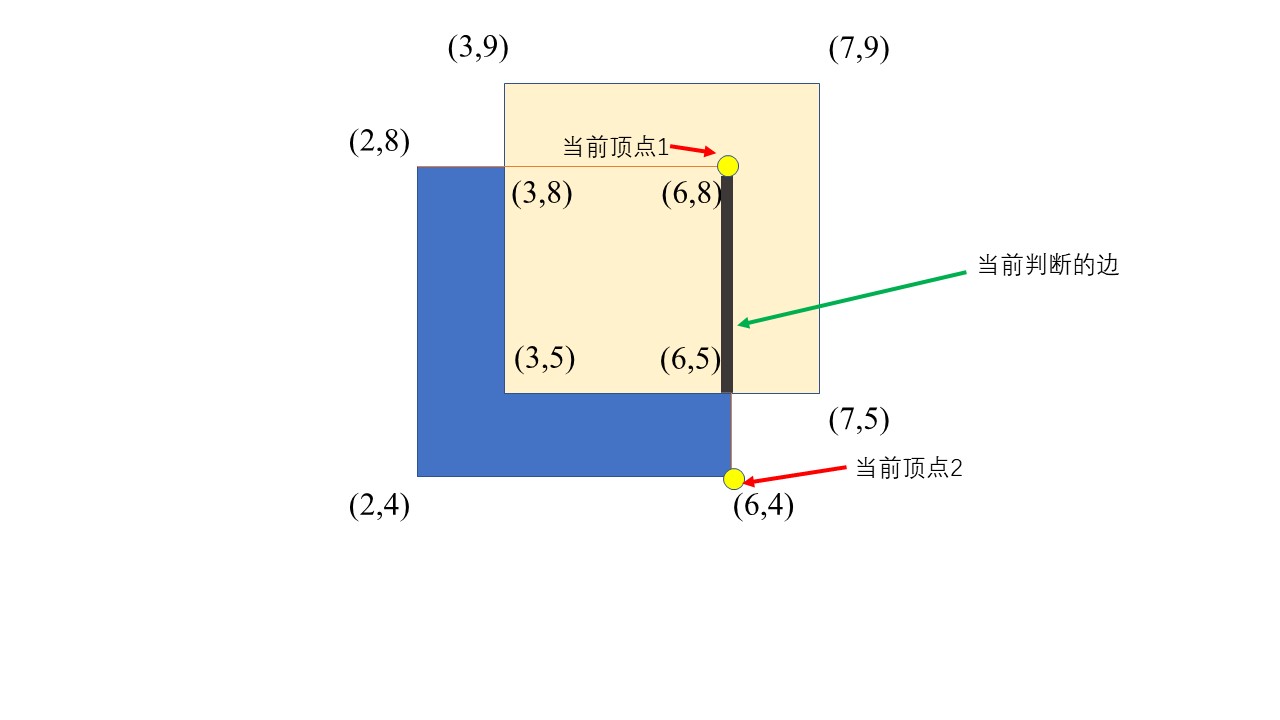
遍历container中所有interval元素,将prevCoord和元素的上界high联合成为新端点P1并加入output中。另外,当将prevCoord和元素的下界low联合成新端点P2,但若P2与output中最后一个端点A重合(如下图所示,点A与low重合),则将点A移除(为了合并区间),否则加入P2到output。
遍历结束,返回output,计算完毕。如下图所示,(3,5),(3,8),(6,5),(6,8)四个点就是布尔运算后的结果中所保存的点。
processInterval
processInterval函数用于计算结果。
变量介绍:
ivl:即输入变量interval,下界和上界分别为low和high。outputContainer:一个vector向量,用于保存结果interval。即输出。deltaCount:也就是count。累加所有已处理的区间的下端点的导数值。
具体来说:
- 对比当前interval与scacnData。如果当前interval覆盖到了scanData没有覆盖到的区域,根据当前interval扩展scanData。例如第一次进入processInterval时,将区间[4,8]传入。此时scanData 中没有数据,扩展scanData 。
- 在scanData中,由输入的ivl的下界low开始,到ivl的high结束。生成新interval,将新生成的interval输入到evaluateInterval进行判断,判断是否加入outputContainer中。
- 在evaluateInterval函数中,判断区间是否通过判定。
以 ps1和ps2为例,流程如下
- 将区间[4,8]传入processInterval 。此时scanData 中没有数据,扩展scanData 。
判断[4,8]是否需要加入outputContainer中,判断结果为不需要。 - 将区间[5,9]传入。传入之前scanData为[4,8]。扩展,扩展后为[4,5,8,9]。
判断[5,8],[8,9]是否需要加入outputContainer中。[5,8]加入。 - 将区间[4,8]传入 。判断[4,5],[5,8]。[5,8]加入。
- 将区间[5,9]传入。判断[5,9]。不加入。
判断区间
判断区间在evaluateInterval中进行。
变量介绍:
1.ivl:区间interval。
2.beforeCount:代表scanData尚未加入ivl时的count值。保存了所有图形扫到的导数值之和。
3.afterCount:代表scanData加入ivl后的count值。保存了所有图形扫到的导数值之和。
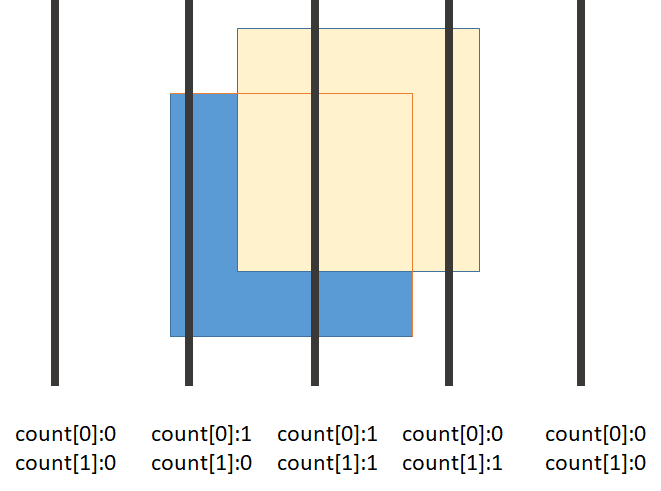
假设有n个矩形进行布尔运算,那么设立一个长度为n的数组count,count[i]代表第i个矩形。布尔运算完成之后的图形设为 Result.
从左到右进行扫描,count值的变化情况如下:
0(尚未扫到该矩形) -----1(当前正在该矩形内部)-----0(离开该矩形)。
判断代码:
bool before = (int)beforeCount > 0;
bool after = (int)afterCount > 0;
int value = (!before & after) - (before & !after);
通过重载的方式,对于布尔运算进行不同的操作。
before和after即总体状态值,为true则代表在结果图形Result之内,否则代表在Result之外。
对于或运算的总体状态值,从count[0]和count[1]任一值为1,考虑到或运算需要将所有图形加入结果中,就代表当前总体状态值为true。
而对于与运算,就需要从count[0]和count[1]所有值全为1,才能判定位于结果图形之内,总体状态值为true。
当进行与运算时,代码如下:
bool before = (int)beforeCount > 0;
调用
inline operator int() const { return T()(counts_[0], counts_[1]); }
再调用
class BinaryAnd
{
public:
inline BinaryAnd() {}
inline bool operator()(int a, int b) { return (a > 0) & (b > 0); }
};
推广到其他布尔运算,则是:
class BinaryOr
{
... (int a, int b) { return (a > 0) | (b > 0); }
};
class BinaryNot
{
...(int a, int b) { return (a > 0) & !(b > 0); }
};
class BinaryXor
{
...(int a, int b) { return (a > 0) ^ (b > 0); }
};
通过模板和重载的方式实现对于不同的布尔运算类型实现不同的before和after取值方法。
计算完before和after的值后,计算value值。value值为1即为入边,为-1即为出边,这两种情况都需要加入outputContainer中。其他情况则不需要。
例如当第一次扫到(2,4),(2,8)边时,判断interavl[4,8]:

beforeCount:0,0------>before=false;
afterCount: 0,1------>after=false;
得出value:0
因此不加入。
扫到(3,5),(3,9)边时,判断interval[5,8]和[5,9]:
对于[5,8]
beforeCount:0,1------>before=false;
afterCount: 1,1------>after=true;
得出value:1
因此作为入边加入。
对于[8,9]
beforeCount:0,0------>before=false;
afterCount: 1,0------>after=false;
得出value:0
扫到(4,4),(4,8)边时,判断interval[4,5]和[5,8]:
对于[4,5]
beforeCount:0,1------>before=false;
afterCount: 0,0------>after=false;
得出value:0
对于[5,8]
beforeCount:1,1------>before=true;
afterCount: 1,0------>after=false;
得出value:-1
作为出边加入。
扫到(7,5),(7,9)边时,判断interval[5,9]:

对于[5,9]
beforeCount:1,0------>before=false;
afterCount: 0,0------>after=false;
得出value:0
最后两个interval判断通过。需要注意的是,虽然都是[5,8]区间,但后续5,8会分别与prevCoord(x坐标)联合形成端点坐标。
体现在结果里就是(3,5),(3,8),(6,5),(6,8)四个端点。
参考资料:
https://www.boost.org/doc/libs/1_75_0/libs/polygon/doc/index.htm
https://www.boost.org/doc/libs/1_75_0/libs/polygon/doc/GTL_boostcon2009.pdf
https://www.boost.org/doc/libs/1_75_0/libs/polygon/doc/GTL_boostcon_draft03.pdf

 浙公网安备 33010602011771号
浙公网安备 33010602011771号