
4 矩阵计算(求导方面)
4 矩阵计算(求导方面)
[!IMPORTANT]
B站视频链接 4 矩阵计算
0 引言
这里所谓的矩阵计算并非简单的矩阵之间的加减乘除,而是利用矩阵进行求导的运算,这个运算在今后的设计以及编写过程是非常重要的。
首先 [2 数据操作和数据预处理](E:\typora\1 DeepLearning\1 WithLiMU\2 Data manipulation and preprocessing.md) 中便已经知道了标量、向量以及矩阵的关系,现在就依靠这几个数据类型进行说明和运算。
定义:
- 标量:全是小写的字母 \(a、b\) 。
- 向量:带箭头的小写字母 \(\vec{a} 、\vec{b}\) 。
- 矩阵:大写的字母 \(A 、B\) 。
1 标量的导数
标量就是一个数据,类似于\(1、2、3\),并非数组或是向、矩阵等。
\(y = f(x)、x\)就是标量 、\(f(x)\)是对应法则 、 \(y\)是自变量$
| \(y\) | \(\frac{dy}{dx}\) |
|---|---|
| \(a\) | \(0\) |
| \(x^n\) | \(nx^{n-1}\) |
| \(e^x\) | \(e^x\) |
| \(lnx\) | \(\frac{1}{x}\) |
| \(sinx\) | \(cosx\) |
| \(u(x)+v(x)\) | \(\frac{du}{dx} + \frac{dv}{dx}\) |
| \(u(x) \times v(x)\) | \(\frac{du}{dx} \times v(x) + \frac{dv}{dx} \times u(x)\) |
| \(\frac{u(x)}{v(x)}\) | \(\frac{u'v-uv'}{(v')^2}\) |
对于不能求导的函数又该怎么办呢?
例如: \(f(x) = |x|\)
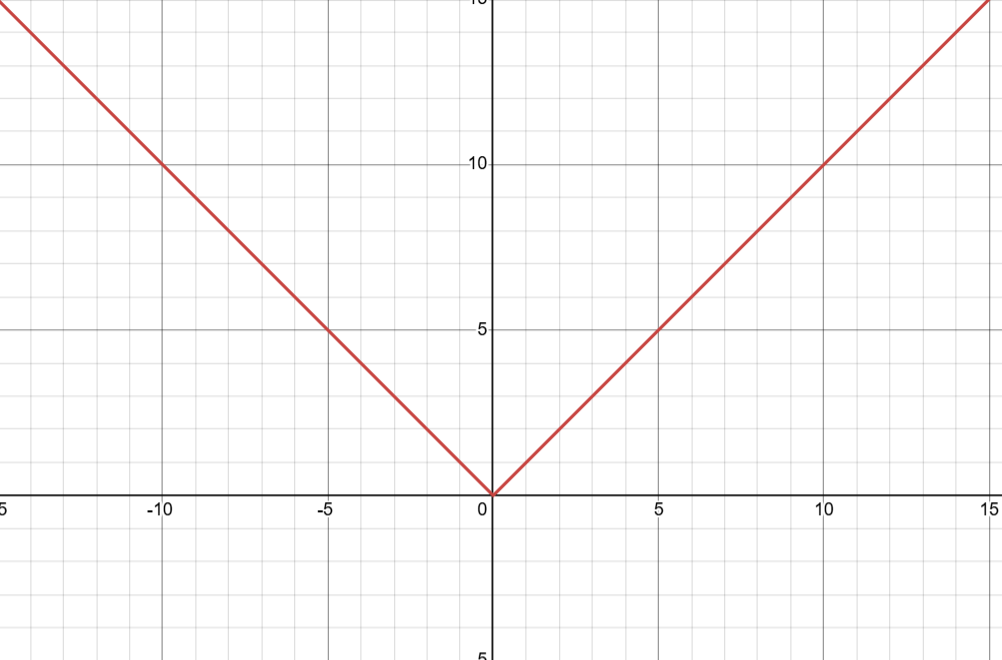
不难看出该函数在\(x>0\)时候\(f'(x) = 1\) , \(x<0\)时候\(f'(x) = -1\) , \(x = 0?\)
这个函数在\(x=0\)的位置明显不可导,对于这种不可导的函数又该怎么办呢?
这个时候有一个叫做亚函数,虽然我不知道他有啥用但是应该和偏导数应该类似,这个时候上面的导数可以写成为
\[\frac{\partial |x|}{x} =
\left \{ \begin{array}{l}
-1 &, x<0\\
1 &, x>0\\
a &, x=0\\
\end{array} \right.
\]
这个时候便可以引入了一个新的数学定义-\(梯度grad\)
[!NOTE]
注意梯度是一个向量而非数据,梯度的方向一定是函数方向导数的最大值
在任意一点\(P(x_1 , x_2 , ... ,x_n)\)的梯度为
\[gradf(p) = (\frac{\partial f}{x_1}|_{P(x_1 , x_2 , ... ,x_n)} , ...,\frac{\partial f}{x_2}|_{P(x_1 , x_2 , ... ,x_n)} ) = (y_1 , y_2,...y_n)
\]
2 向量和标量的混合导数
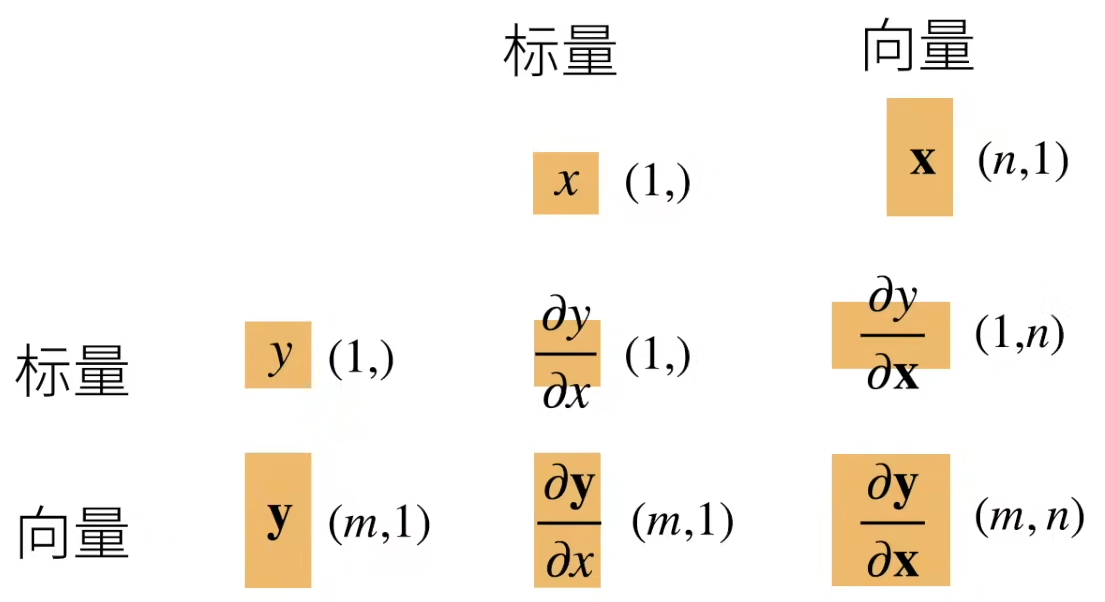
向量和标量之间混合求导会出现下面四种情况
- \(y是一个标量 ,x也是一个标量 会得到\frac{\partial y}{\partial x }也是一个标量\) 。
- \(\vec{y}是一个向量 ,也是一个标量 会得到\frac{\partial \vec{y}}{\partial x }是一个向量\) 。
- \(y是一个标量 ,\vec{x}也是一个向量量 会得到\frac{\partial y}{\partial \vec{x} }也是一个向量 ,但是是一个躺着的向量\) 。
- \(\vec{y} 和 \vec{x}均为向量,那么\frac{\partial \vec{y}}{\partial \vec{x} } 就是一个矩阵A\) 。
举个例子说明一下吧:
\[\text{令}\overline{y}=\left[ \begin{array}{c}
y_1\\
y_2\\
\vdots\\
y_n\\
\end{array} \right] \,\,,\,\,\overline{x}=\left[ \begin{array}{c}
x_1\\
x_2\\
\vdots\\
x_n\\
\end{array} \right] \text{则}\frac{\partial \overline{y}}{\partial \vec{x}}=\left[ \begin{array}{c}
\frac{\partial y_1}{\partial \vec{x}}\\
\frac{\partial y_2}{\partial \vec{x}}\\
\vdots\\
\frac{\partial y_n}{\partial \vec{x}}\\
\end{array} \right] =\left[ \begin{matrix}{l}
\frac{\partial y_1}{\partial x_1}& \frac{\partial y_1}{\partial x_2}& \cdots& \frac{\partial y_1}{\partial x_n}\\
\frac{\partial y_2}{\partial x_1}& \frac{\partial y_2}{\partial x_2}& \cdots& \frac{\partial y_2}{\partial x_n}\\
\vdots& \vdots& \cdots& \vdots\\
\frac{\partial y_n}{\partial x_1}& \frac{\partial y_n}{\partial x_2}& \cdots& \frac{\partial y_n}{\partial x_n}\\
\end{matrix} \right]
\]
3 总结
y如果是向量的话这个是竖着的。
x如果是向量的话这个是躺着的。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号