SIMULINK仿真两车追赶的模糊控制系统
 matlab fuzzy工具箱配置汽车追赶模糊推理系统实验(人工智能导论第四版王万良)
matlab fuzzy工具箱配置汽车追赶模糊推理系统实验(人工智能导论第四版王万良)
实验目的
理解模糊逻辑推理的原理及特点,熟练应用模糊推理。
实验内容
假设两汽车均为理想状态,即 ,Y为速度,U为油门控制输入。
(1)设计模糊控制器控制汽车由静止启动,追赶200m外时速90km的汽车并与其保持30m的距离。
(2)在25时刻前车速度改为时速110km时,仍与其保持30m距离。
(3)在35时刻前车速度改为时速70km时,仍与其保持30m距离。
要求:
(1)设计两输入一输出的模糊控制器,给出输入、输出语言变量的隶属函数图,模糊控制规则表,推论结果立体图。
(2)用SIMULINK仿真两车追赶的模糊控制系统,给出目标车的速度曲线图、油门踩放图、追赶车速度图、与前车相对距离图。
实验过程
(1)使用fuzzy工具箱配置模糊推理系统
Matlab命令行输入fuzzy,配置模糊系统,点击“Edit”设置2个输入1个输出。命名输入为r、theta1、输出为推力Throttle,各自论域分别为[0,1]、[-3,3]和[-1,1],并设置隶属函数均为三角形,具体如图1、图2。
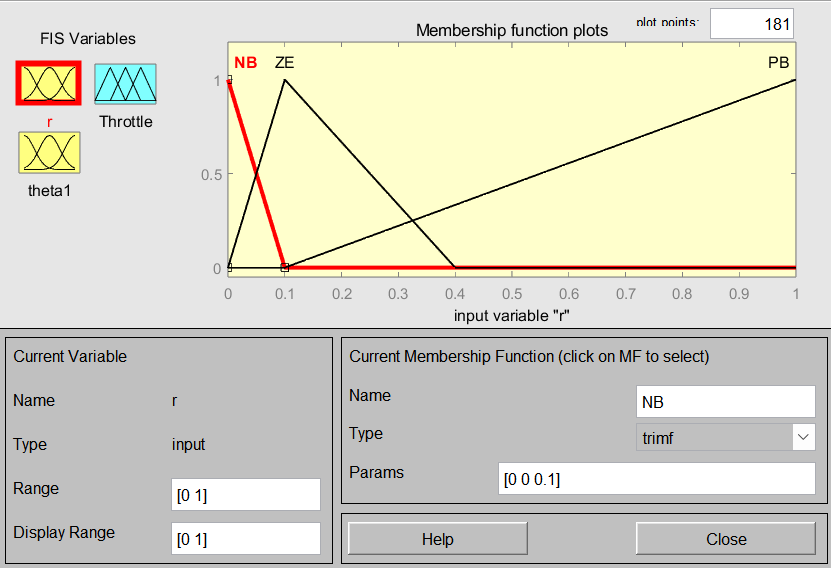

图1 输入语言变量r和theta的隶属函数图
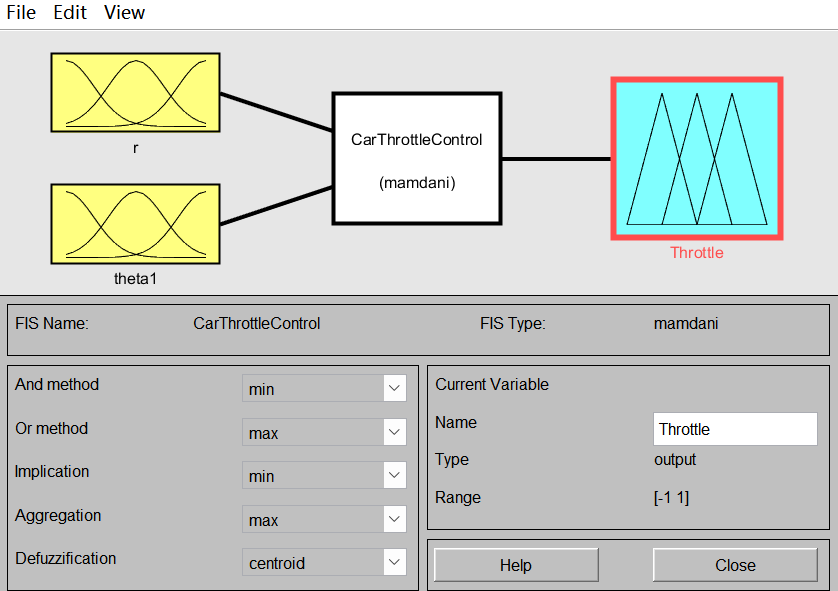
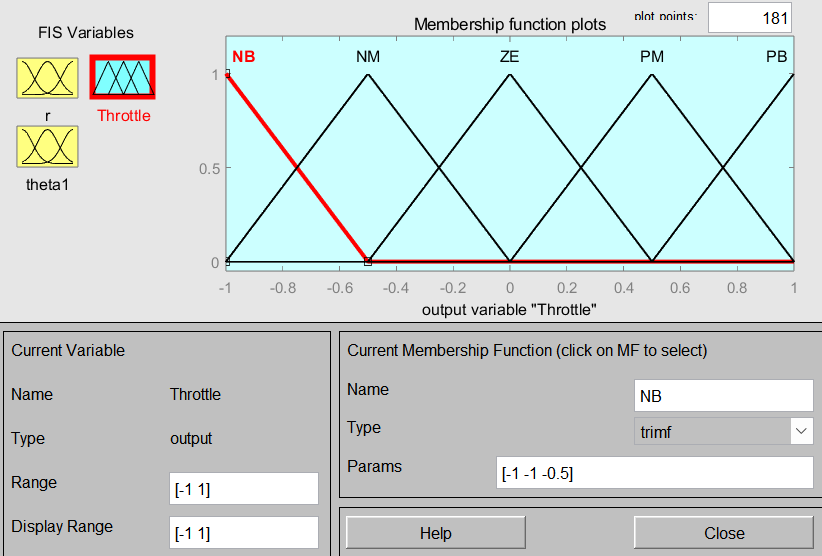
图2 输出语言变量Throttle隶属函数图
双击图2中的白色规则库模块,创建规则库如图3。
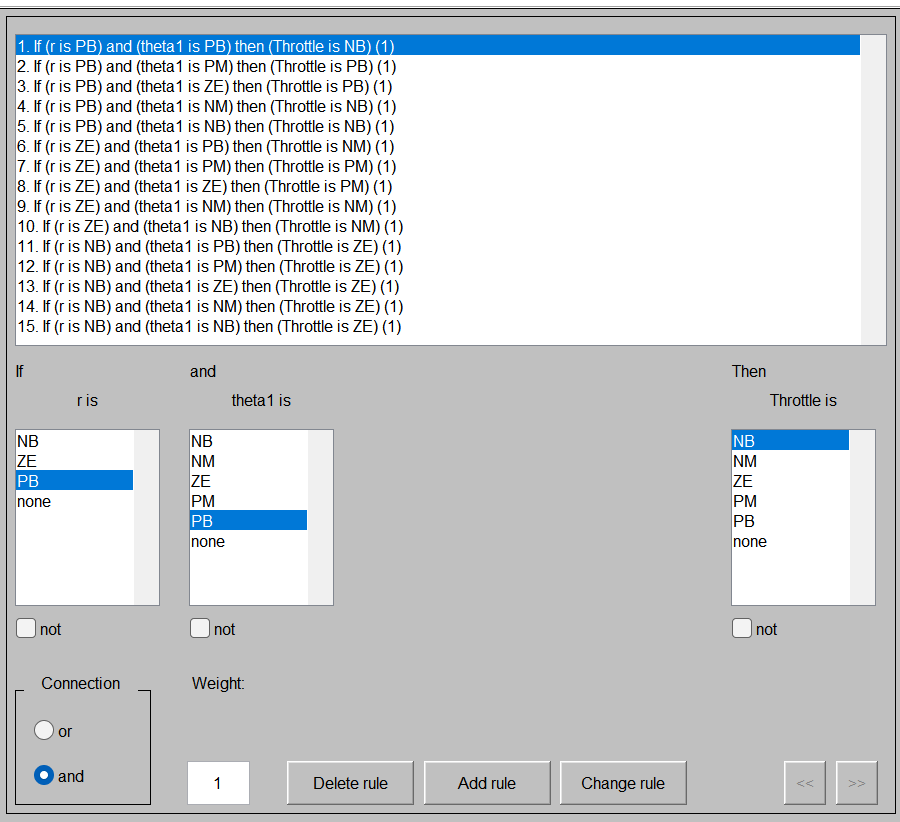
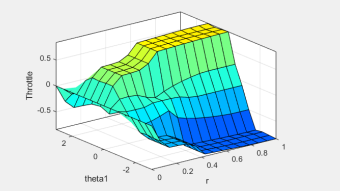
点击“View--Surface”可以查看Throttle(theta1,r)函数图以便直观理解映射关系,点击“View--Rule”可设置theta1和r的值查看对应的输出量,如图4。

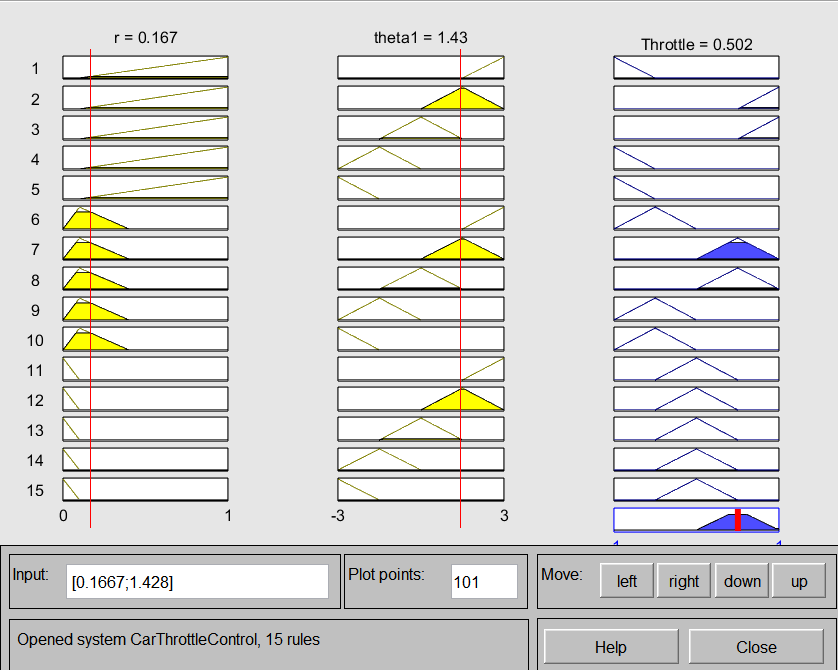
图4 模糊推理系统推论结果立体图
最后将建立好的FLS模糊推理系统保存,命名为“CarController.fis”。
(2)在simulink中设计两车追赶模糊控制系统
设计如下控制系统,在fuzz模块中导入模糊推理系统“CarController.fis”,根据题目要求设计simulink仿真追赶模型如图5。

图5 两车追赶模糊控制系统仿真
其中,从上到下三个阶跃函数的阶跃时间分别设为0、25、35,使得car1(被追赶)汽车时速90km,在25时刻速度改为时速110km,在35时刻速度改为时速70km。car1的速度变化如图6(a)所示。
使用积分函数1/s求得car1行驶路程,在设计函数f(u)=u*1000/3600+200将单位为km/h的速度转换为m/s再加200m,体现car1在car2的前200m处。

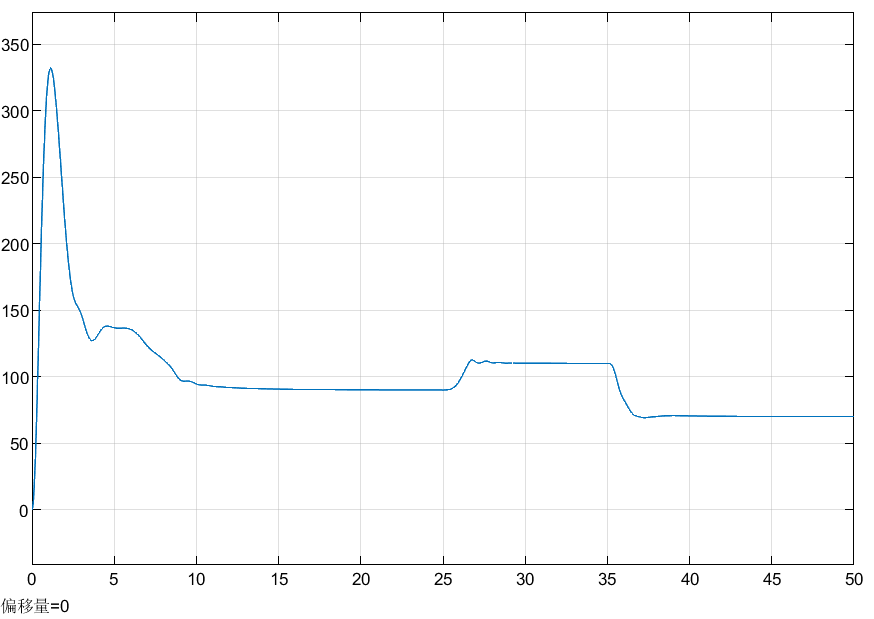
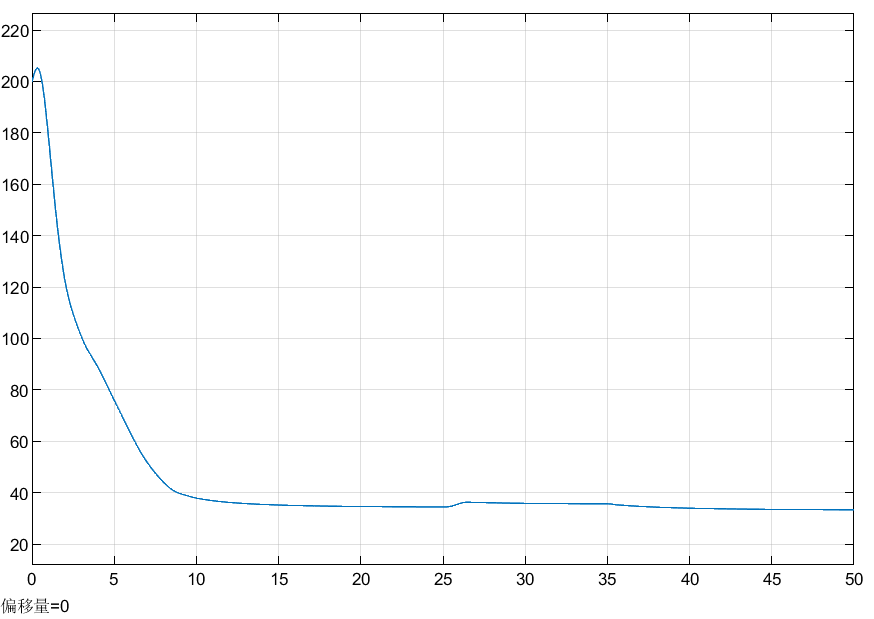
模糊逻辑控制器输出经过增益K=700放大,限幅函数上限设置为1000。将仿真时间设置为固定步长0.001,仿真结果如图6-图8所示。可以看到,最终两车相对距离保持30m左右,油门踩放趋于0。

实验总结
模糊推理是一种基于模糊集合论的不确定推理方式,它通过模糊规则和隶属函数来描述和推理模糊关系。模糊集合是对经典集合的扩展,每个元素都有一个隶属度,表示其属于某个集合的程度(范围在0到1之间)。隶属函数用于确定元素的隶属度,常见的隶属函数有三角函数、梯形函数等。模糊关系R 是定义两个模糊集合 A 和 B之间的关系,其中每个元素的值表示对应元素之间的关系程度。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号