


ROS import ERROR 的一种方法
在进行ORKdemo的运行过程中,输入
rosrun object_recognition_core push.sh
遇到了语法错误,如图所示
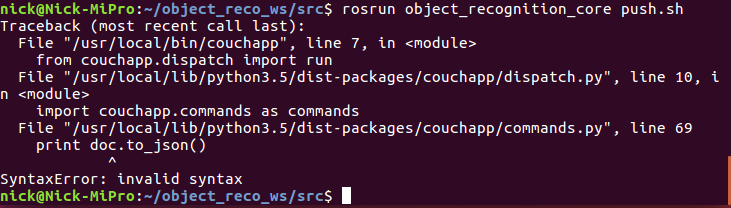
按理来说这些都是现成的软件包,不应该会出现语法错误,这困扰了我不少时间。
于是我在虚拟机上重新运行了这段程序,发现没有任何问题,在google上也没有找到回答。
首先根据语法错误可以推断出这大概是由于python2错误运行在了python3环境下。
我所使用的系统为ubuntu16,ros发行版本为Kinetic,系统内置了python3.5和2.7。
于是我使用了
export PYTHONPATH=/opt/ros/kinetic/lib/python2.7/dist-packages/
将各路带dist-packages的路径都export一遍,但是没有用。
然后我又卸载了Anaconda,把bash里的路径清理干净,但是没有用。
再然后我通过源码编译ORK,但是没有用。
重装ROS,但是没有用。
最后我都想重装系统了,但是我没有试。
最后我用gedit打开couchapp,发现第一行所引用的是python3.5,改成python
然后进入到/usr/local/lib/python3.5把其中的dist-packages文件夹删除,再次运行上文命令行,问题解决,此时已经距离问题出现过了好几天了。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号