
摘要: 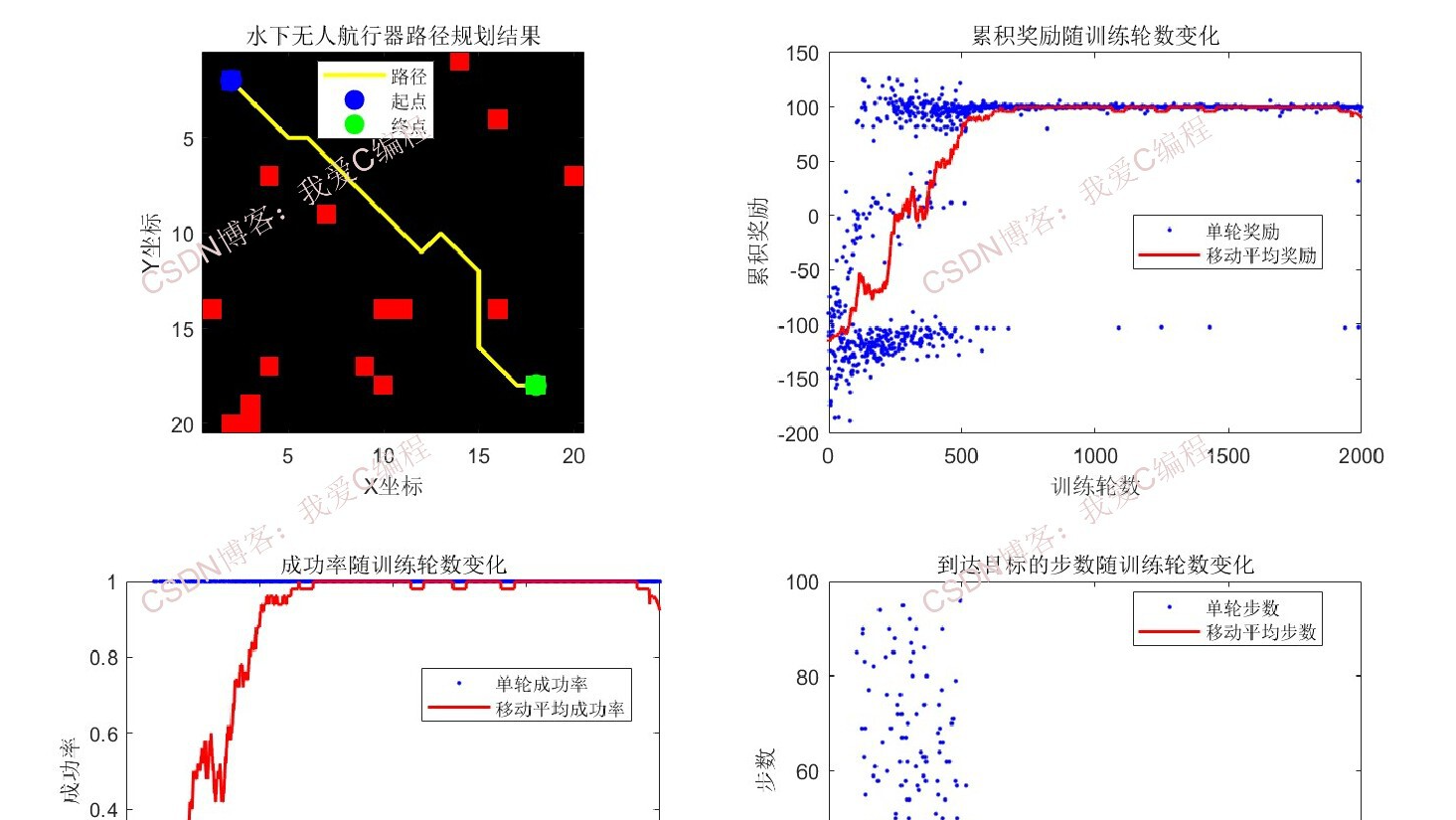 1.引言 水下无人航行器 (Autonomous Underwater Vehicle, AUV) 的路径规划与避障是海洋探索、资源开发和军事应用中的关键技术。传统的路径规划方法 (如A*、Dijkstra) 往往难以应对复杂多变的海洋环境,而强化学习 (尤其是Q-Learning) 因其无需精确环 阅读全文
1.引言 水下无人航行器 (Autonomous Underwater Vehicle, AUV) 的路径规划与避障是海洋探索、资源开发和军事应用中的关键技术。传统的路径规划方法 (如A*、Dijkstra) 往往难以应对复杂多变的海洋环境,而强化学习 (尤其是Q-Learning) 因其无需精确环 阅读全文
1.引言 水下无人航行器 (Autonomous Underwater Vehicle, AUV) 的路径规划与避障是海洋探索、资源开发和军事应用中的关键技术。传统的路径规划方法 (如A*、Dijkstra) 往往难以应对复杂多变的海洋环境,而强化学习 (尤其是Q-Learning) 因其无需精确环 阅读全文
posted @ 2026-01-10 15:17
我爱C编程
阅读(15)
评论(0)
推荐(0)
摘要: 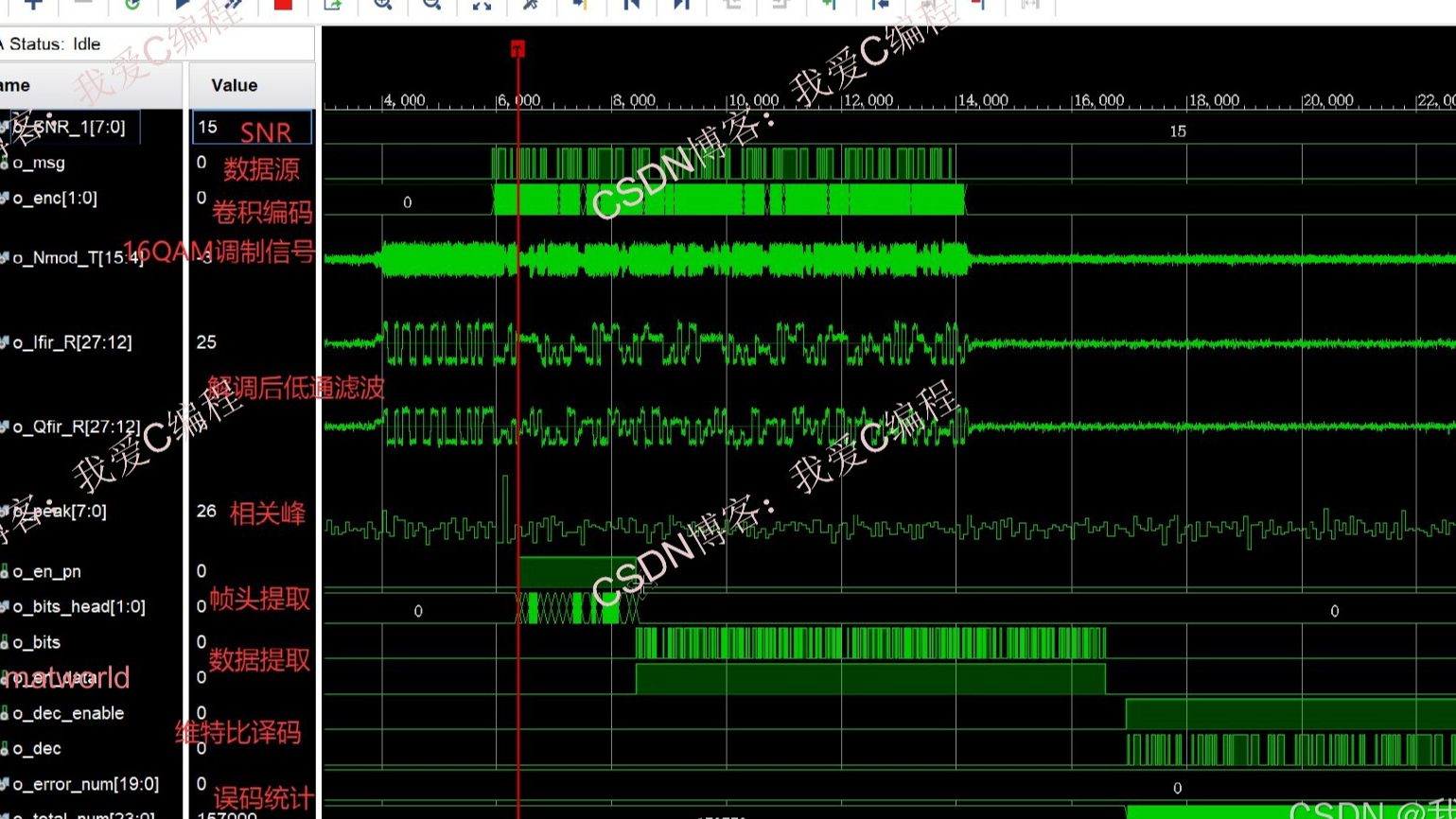 1.引言 基于FPGA的16QAM软解调+卷积编码Viterbi译码通信系统开发,包含帧同步,高斯信道,误码统计,可设置SNR。系统包括16QAM调制,16QAM软解调模块,217卷积编码模块,维特比译码模块,AWGN信道模块,误码统计模块,帧同步模块,数据源模块等。 2.FPGA硬件片内测试效果 阅读全文
1.引言 基于FPGA的16QAM软解调+卷积编码Viterbi译码通信系统开发,包含帧同步,高斯信道,误码统计,可设置SNR。系统包括16QAM调制,16QAM软解调模块,217卷积编码模块,维特比译码模块,AWGN信道模块,误码统计模块,帧同步模块,数据源模块等。 2.FPGA硬件片内测试效果 阅读全文
1.引言 基于FPGA的16QAM软解调+卷积编码Viterbi译码通信系统开发,包含帧同步,高斯信道,误码统计,可设置SNR。系统包括16QAM调制,16QAM软解调模块,217卷积编码模块,维特比译码模块,AWGN信道模块,误码统计模块,帧同步模块,数据源模块等。 2.FPGA硬件片内测试效果 阅读全文
posted @ 2026-01-10 15:05
我爱C编程
阅读(15)
评论(0)
推荐(0)
 浙公网安备 33010602011771号
浙公网安备 33010602011771号