go中的数据结构-字典map的使用及原理
1. map的使用
golang中的map是一种数据类型,将键与值绑定到一起,底层是用哈希表实现的,可以快速的通过键找到对应的值。
类型表示:map[keyType][valueType] key一定要是可比较的类型(可以理解为支持==的操作),value可以是任意类型。
初始化:map只能使用make来初始化,声明的时候默认为一个为nil的map,此时进行取值,返回的是对应类型的零值(不存在也是返回零值)。添加元素无任何意义,还会导致运行时错误。向未初始化的map赋值引起 panic: assign to entry in nil map。
1 package main 2 3 import ( 4 "fmt" 5 ) 6 7 // bool 的零值是false 8 var m map[int]bool 9 a, ok := m[1] 10 fmt.Println(a, ok) // false false 11 12 // int 的零值是0 13 var m map[int]int 14 a, ok := m[1] 15 fmt.Println(a, ok) // 0 false 16 17 18 func main() { 19 var agemap[string]int 20 if age== nil { 21 fmt.Println("map is nil.") 22 age= make(map[string]int) 23 } 24 }
清空map:对于一个有一定数据的集合 exp,清空的办法就是再次初始化: exp = make(map[string]int),如果后期不再使用该map,则可以直接:exp= nil 即可,但是如果还需要重复使用,则必须进行make初始化,否则无法为nil的map添加任何内容。
属性:与切片一样,map 是引用类型。当一个 map 赋值给一个新的变量,它们都指向同一个内部数据结构。因此改变其中一个也会反映到另一个。作为形参或返回参数的时候,传递的是地址的拷贝,扩容时也不会改变这个地址。
1 func main() { 2 exp := map[string]int{ 3 "steve": 20, 4 "jamie": 80, 5 } 6 fmt.Println("Ori exp", age) 7 newexp:= exp 8 newexp["steve"] = 18 9 fmt.Println("exp changed", exp) 10 } 11 12 //Ori age map[steve:20 jamie:80] 13 //age changed map[steve:18 jamie:80]
遍历map:map本身是无序的,在遍历的时候并不会按照你传入的顺序,进行传出。
1 //正常遍历: 2 for k, v := range exp { 3 fmt.Println(k, v) 4 } 5 6 //有序遍历 7 import "sort" 8 var keys []string 9 // 把key单独抽取出来,放在数组中 10 for k, _ := range exp { 11 keys = append(keys, k) 12 } 13 // 进行数组的排序 14 sort.Strings(keys) 15 // 遍历数组就是有序的了 16 for _, k := range keys { 17 fmt.Println(k, m[k]) 18 }
2. map的结构
Go中的map在可以在 $GOROOT/src/runtime/map.go找到它的实现。哈希表的数据结构中一些关键的域如下所示:
1 type hmap struct { 2 count int //元素个数 3 flags uint8 4 B uint8 //扩容常量 5 noverflow uint16 //溢出 bucket 个数 6 hash0 uint32 //hash 种子 7 buckets unsafe.Pointer //bucket 数组指针 8 oldbuckets unsafe.Pointer //扩容时旧的buckets 数组指针 9 nevacuate uintptr //扩容搬迁进度 10 extra *mapextra //记录溢出相关 11 } 12 13 type bmap struct { 14 tophash [bucketCnt]uint8 15 // Followed by bucketCnt keys 16 //and then bucketan Cnt values 17 // Followed by overflow pointer. 18 }
说明:每个map的底层都是hmap结构体,它是由若干个描述hmap结构体的元素、数组指针、extra等组成,buckets数组指针指向由若干个bucket组成的数组,其每个bucket里存放的是key-value数据(通常是8个)和overflow字段(指向下一个bmap),每个key插入时会根据hash算法归到同一个bucket中,当一个bucket中的元素超过8个的时候,hmap会使用extra中的overflow来扩展存储key。
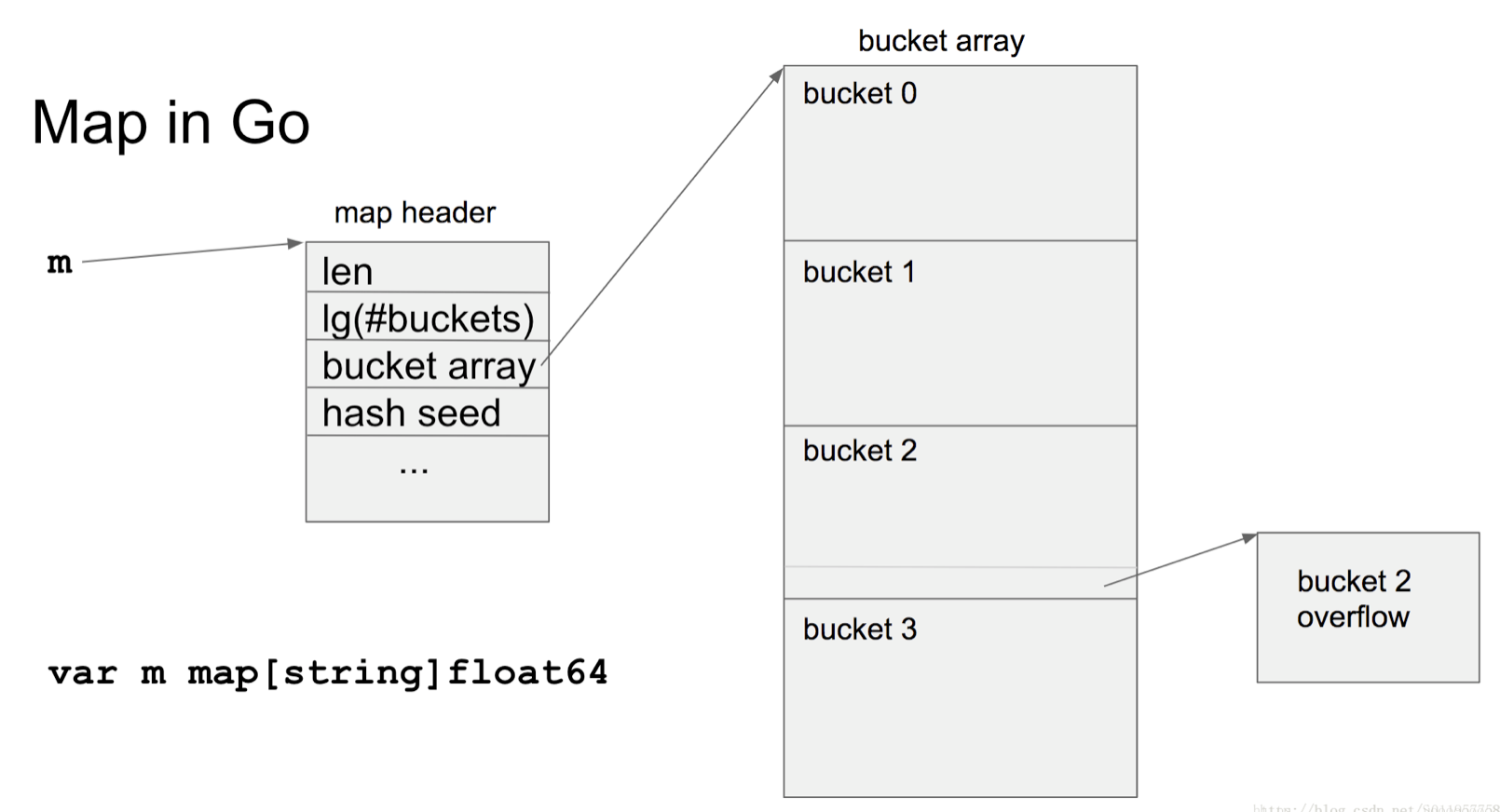
图中len 就是当前map的元素个数,也就是len()返回的值。也是结构体中hmap.count的值。bucket array是指数组指针,指向bucket数组。hash seed 哈希种子。overflow指向下一个bucket。
map的底层主要是由三个结构构成:
- hmap --- map的最外层的数据结构,包括了map的各种基础信息、如大小、bucket,一个大的结构体。
- mapextra --- 记录map的额外信息,hmap结构体里的extra指针指向的结构,例如overflow bucket。
- bmap --- 代表bucket,每一个bucket最多放8个kv,最后由一个overflow字段指向下一个bmap,注意key、value、overflow字段都不显示定义,而是通过maptype计算偏移获取的。
mapextra的结构如下
1 // mapextra holds fields that are not present on all maps. 2 type mapextra struct { 3 // If both key and value do not contain pointers and are inline, then we mark bucket 4 // type as containing no pointers. This avoids scanning such maps. 5 // However, bmap.overflow is a pointer. In order to keep overflow buckets 6 // alive, we store pointers to all overflow buckets in hmap.extra.overflow and hmap.extra.oldoverflow. 7 // overflow and oldoverflow are only used if key and value do not contain pointers. 8 // overflow contains overflow buckets for hmap.buckets. 9 // oldoverflow contains overflow buckets for hmap.oldbuckets. 10 // The indirection allows to store a pointer to the slice in hiter. 11 overflow *[]*bmap 12 oldoverflow *[]*bmap 13 14 // nextOverflow holds a pointer to a free overflow bucket. 15 nextOverflow *bmap 16 }
其中hmap.extra.nextOverflow指向的是预分配的overflow bucket,预分配的用完了那么值就变成nil。
bmap的详细结构如下
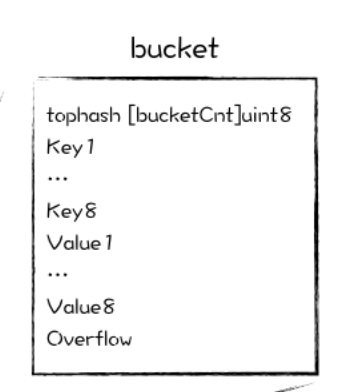
bmap中所有key存在一块,所有value存在一块,这样做方便内存对齐。当key大于128字节时,bucket的key字段存储的会是指针,指向key的实际内容;value也是一样。
hash值的高8位存储在bucket中的tophash字段。每个桶最多放8个kv对,所以tophash类型是数组[8]uint8。把高八位存储起来,这样不用完整比较key就能过滤掉不符合的key,加快查询速度。实际上当hash值的高八位小于常量minTopHash时,会加上minTopHash,区间[0, minTophash)的值用于特殊标记。查找key时,计算hash值,用hash值的高八位在tophash中查找,有tophash相等的,再去比较key值是否相同。
1 type typeAlg struct { 2 // function for hashing objects of this type 3 // (ptr to object, seed) -> hash 4 hash func(unsafe.Pointer, uintptr) uintptr 5 // function for comparing objects of this type 6 // (ptr to object A, ptr to object B) -> ==? 7 equal func(unsafe.Pointer, unsafe.Pointer) bool 8 9 // tophash calculates the tophash value for hash. 10 func tophash(hash uintptr) uint8 { 11 top := uint8(hash >> (sys.PtrSize*8 - 8)) 12 if top < minTopHash { 13 top += minTopHash 14 } 15 return top 16 }
golang为每个类型定义了类型描述器_type,并实现了hashable类型的_type.alg.hash和_type.alg.equal,以支持map的范型,定义了这类key用什么hash函数、bucket的大小、怎么比较之类的,通过这个变量来实现范型。
3. map的基本操作
3.1 map的创建
1 //makemap为make(map [k] v,hint)实现Go map创建。 2 //如果编译器已确定映射或第一个存储桶,可以在堆栈上创建,hmap或bucket可以为非nil。 3 //如果h!= nil,则可以直接在h中创建map。 4 //如果h.buckets!= nil,则指向的存储桶可以用作第一个存储桶。 5 func makemap(t *maptype, hint int, h *hmap) *hmap { 6 if hint < 0 || hint > int(maxSliceCap(t.bucket.size)) { 7 hint = 0 8 } 9 10 // 初始化Hmap 11 if h == nil { 12 h = new(hmap) 13 } 14 h.hash0 = fastrand() 15 16 // 查找将保存请求的元素数的size参数 17 B := uint8(0) 18 for overLoadFactor(hint, B) { 19 B++ 20 } 21 h.B = B 22 23 // 分配初始哈希表 24 // if B == 0, 稍后会延迟分配buckets字段(在mapassign中) 25 //如果提示很大,则将内存清零可能需要一段时间。 26 if h.B != 0 { 27 var nextOverflow *bmap 28 h.buckets, nextOverflow = makeBucketArray(t, h.B, nil) 29 if nextOverflow != nil { 30 h.extra = new(mapextra) 31 h.extra.nextOverflow = nextOverflow 32 } 33 } 34 35 return h 36 }
1 // makeBucketArray初始化地图存储区的后备数组。 2 // 1 << b是要分配的最小存储桶数。 3 // dirtyalloc之前应该为nil或bucket数组 4 //由makeBucketArray使用相同的t和b参数分配。 5 //如果dirtyalloc为零,则将分配一个新的支持数组,dirtyalloc将被清除并作为后备数组重用。 6 func makeBucketArray(t *maptype, b uint8, dirtyalloc unsafe.Pointer) (buckets unsafe.Pointer, nextOverflow *bmap) { 7 base := bucketShift(b) 8 nbuckets := base 9 // 对于小b,溢出桶不太可能出现。 10 // 避免计算的开销。 11 if b >= 4 { 12 //加上估计的溢出桶数 13 //插入元素的中位数 14 //与此值b一起使用。 15 nbuckets += bucketShift(b - 4) 16 sz := t.bucket.size * nbuckets 17 up := roundupsize(sz) 18 if up != sz { 19 nbuckets = up / t.bucket.size 20 } 21 } 22 if dirtyalloc == nil { 23 buckets = newarray(t.bucket, int(nbuckets)) 24 } else { 25 // dirtyalloc先前是由上面的newarray(t.bucket,int(nbuckets)),但不能为空。 26 buckets = dirtyalloc 27 size := t.bucket.size * nbuckets 28 if t.bucket.kind&kindNoPointers == 0 { 29 memclrHasPointers(buckets, size) 30 } else { 31 memclrNoHeapPointers(buckets, size) 32 } 33 } 34 35 if base != nbuckets { 36 //我们预先分配了一些溢出桶。 37 //为了将跟踪这些溢出桶的开销降至最低,我们使用的约定是,如果预分配的溢出存储桶发生了溢出指针为零,则通过碰撞指针还有更多可用空间。 38 //对于最后一个溢出存储区,我们需要一个安全的非nil指针;只是用bucket。 39 nextOverflow = (*bmap)(add(buckets, base*uintptr(t.bucketsize))) 40 last := (*bmap)(add(buckets, (nbuckets-1)*uintptr(t.bucketsize))) 41 last.setoverflow(t, (*bmap)(buckets)) 42 } 43 return buckets, nextOverflow 44 }

3.2 查询操作
1 // mapaccess1返回指向h [key]的指针。从不返回nil,而是 如果值类型为零,它将返回对零对象的引用,该键不在map中。 2 //注意:返回的指针可能会使整个map保持活动状态,因此请不要坚持很长时间。 3 func mapaccess1(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer { 4 if raceenabled && h != nil { //raceenabled是否启用数据竞争检测。 5 callerpc := getcallerpc() 6 pc := funcPC(mapaccess1) 7 racereadpc(unsafe.Pointer(h), callerpc, pc) 8 raceReadObjectPC(t.key, key, callerpc, pc) 9 } 10 if msanenabled && h != nil { 11 msanread(key, t.key.size) 12 } 13 if h == nil || h.count == 0 { 14 return unsafe.Pointer(&zeroVal[0]) 15 } 16 // 并发访问检查 17 if h.flags&hashWriting != 0 { 18 throw("concurrent map read and map write") 19 } 20 21 // 计算key的hash值 22 alg := t.key.alg 23 hash := alg.hash(key, uintptr(h.hash0)) // alg.hash 24 25 // hash值对m取余数得到对应的bucket 26 m := uintptr(1)<<h.B - 1 27 b := (*bmap)(add(h.buckets, (hash&m)*uintptr(t.bucketsize))) 28 29 // 如果老的bucket还没有迁移,则在老的bucket里面找 30 if c := h.oldbuckets; c != nil { 31 if !h.sameSizeGrow() { 32 m >>= 1 33 } 34 oldb := (*bmap)(add(c, (hash&m)*uintptr(t.bucketsize))) 35 if !evacuated(oldb) { 36 b = oldb 37 } 38 } 39 40 // 计算tophash,取高8位 41 top := uint8(hash >> (sys.PtrSize*8 - 8)) 42 43 for { 44 for i := uintptr(0); i < bucketCnt; i++ { 45 // 检查top值,如高8位不一样就找下一个 46 if b.tophash[i] != top { 47 continue 48 } 49 50 // 取key的地址 51 k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize)) 52 53 if alg.equal(key, k) { // alg.equal 54 // 取value得地址 55 v := add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize)) 56 } 57 } 58 59 // 如果当前bucket没有找到,则找bucket链的下一个bucket 60 b = b.overflow(t) 61 if b == nil { 62 // 返回零值 63 return unsafe.Pointer(&zeroVal[0]) 64 } 65 } 66 }
-
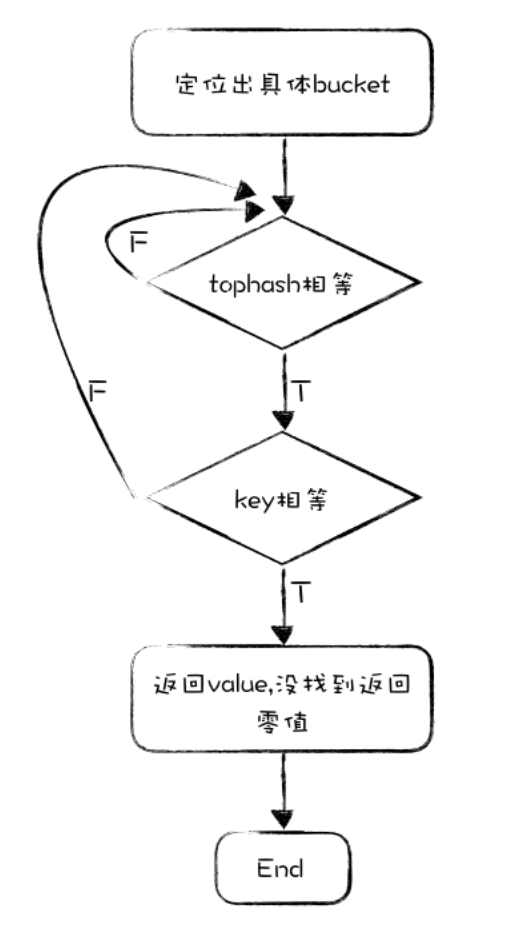
先定位出bucket,如果正在扩容,并且这个bucket还没搬到新的hash表中,那么就从老的hash表中查找。
-
在bucket中进行顺序查找,使用高八位进行快速过滤,高八位相等,再比较key是否相等,找到就返回value。如果当前bucket找不到,就往下找overflow bucket,都没有就返回零值。
访问的时候,并不进行扩容的数据搬迁。并且并发有写操作时抛异常。
注意,t.bucketsize并不是bmap的size,而是bmap加上存储key、value、overflow指针,所以查找bucket的时候时候用的不是bmap的szie。
3.3 更新/插入过程
1 // 与mapaccess类似,但是如果map中不存在密钥,则为该密钥分配一个插槽 2 func mapassign(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer { 3 ... 4 //设置hashWriting调用alg.hash,因为alg.hash可能出现紧急情况后,在这种情况下,我们实际上并没有进行写操作. 5 h.flags |= hashWriting 6 7 if h.buckets == nil { 8 h.buckets = newobject(t.bucket) // newarray(t.bucket, 1) 9 } 10 11 again: 12 bucket := hash & bucketMask(h.B) 13 if h.growing() { 14 growWork(t, h, bucket) 15 } 16 b := (*bmap)(unsafe.Pointer(uintptr(h.buckets) + bucket*uintptr(t.bucketsize))) 17 top := tophash(hash) 18 19 var inserti *uint8 20 var insertk unsafe.Pointer 21 var val unsafe.Pointer 22 for { 23 for i := uintptr(0); i < bucketCnt; i++ { 24 if b.tophash[i] != top { 25 if b.tophash[i] == empty && inserti == nil { 26 inserti = &b.tophash[i] 27 insertk = add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize)) 28 val = add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize)) 29 } 30 continue 31 } 32 k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize)) 33 if t.indirectkey { 34 k = *((*unsafe.Pointer)(k)) 35 } 36 if !alg.equal(key, k) { 37 continue 38 } 39 // 已经有一个 mapping for key. 更新它. 40 if t.needkeyupdate { 41 typedmemmove(t.key, k, key) 42 } 43 val = add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize)) 44 goto done 45 } 46 ovf := b.overflow(t) 47 if ovf == nil { 48 break 49 } 50 b = ovf 51 } 52 //// 如果已经达到了load factor的最大值,就继续扩容。 53 //找不到键的映射。分配新单元格并添加条目。 54 //如果达到最大负载系数或溢出桶过多,并且我们还没有处于成长的中间,就开始扩容。 55 if !h.growing() && (overLoadFactor(h.count+1, h.B) || 56 tooManyOverflowBuckets(h.noverflow, h.B)) { 57 hashGrow(t, h) 58 goto again // //扩大表格会使所有内容无效, so try again 59 } 60 if inserti == nil { 61 // 当前所有存储桶已满,请分配一个新的存储桶 62 newb := h.newoverflow(t, b) 63 inserti = &newb.tophash[0] 64 insertk = add(unsafe.Pointer(newb), dataOffset) 65 val = add(insertk, bucketCnt*uintptr(t.keysize)) 66 } 67 68 // 在插入的位置,存储键值 69 if t.indirectkey { 70 kmem := newobject(t.key) 71 *(*unsafe.Pointer)(insertk) = kmem 72 insertk = kmem 73 } 74 if t.indirectvalue { 75 vmem := newobject(t.elem) 76 *(*unsafe.Pointer)(val) = vmem 77 } 78 typedmemmove(t.key, insertk, key) 79 *inserti = top 80 h.count++ 81 82 done: 83 if h.flags&hashWriting == 0 { 84 throw("concurrent map writes") 85 } 86 h.flags &^= hashWriting 87 if t.indirectvalue { 88 val = *((*unsafe.Pointer)(val)) 89 } 90 return val 91 }
-
hash表如果正在扩容,并且这次要操作的bucket还没搬到新hash表中,那么先进行搬迁(扩容细节下面细说)。
-
在buck中寻找key,同时记录下第一个空位置,如果找不到,那么就在空位置中插入数据;如果找到了,那么就更新对应的value;
-
找不到key就看下需不需要扩容,需要扩容并且没有正在扩容,那么就进行扩容,然后回到第一步。
-
找不到key,不需要扩容,但是没有空slot,那么就分配一个overflow bucket挂在链表结尾,用新bucket的第一个slot放存放数据。
3.5 删除的过程
1 func mapdelete(t *maptype, h *hmap, key unsafe.Pointer) { 2 ... 3 // Set hashWriting after calling alg.hash, since alg.hash may panic, 4 // in which case we have not actually done a write (delete). 5 h.flags |= hashWriting 6 7 bucket := hash & bucketMask(h.B) 8 if h.growing() { 9 growWork(t, h, bucket) 10 } 11 b := (*bmap)(add(h.buckets, bucket*uintptr(t.bucketsize))) 12 top := tophash(hash) 13 search: 14 for ; b != nil; b = b.overflow(t) { 15 for i := uintptr(0); i < bucketCnt; i++ { 16 if b.tophash[i] != top { 17 continue 18 } 19 k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize)) 20 k2 := k 21 if t.indirectkey { 22 k2 = *((*unsafe.Pointer)(k2)) 23 } 24 if !alg.equal(key, k2) { 25 continue 26 } 27 // 如果其中有指针,则仅清除键。 28 if t.indirectkey { 29 *(*unsafe.Pointer)(k) = nil 30 } else if t.key.kind&kindNoPointers == 0 { 31 memclrHasPointers(k, t.key.size) 32 } 33 v := add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize)) 34 if t.indirectvalue { 35 *(*unsafe.Pointer)(v) = nil 36 } else if t.elem.kind&kindNoPointers == 0 { 37 memclrHasPointers(v, t.elem.size) 38 } else { 39 memclrNoHeapPointers(v, t.elem.size) 40 } 41 // 若找到把对应的tophash里面的打上空的标记 42 b.tophash[i] = empty 43 h.count-- 44 break search 45 } 46 } 47 48 if h.flags&hashWriting == 0 { 49 throw("concurrent map writes") 50 } 51 h.flags &^= hashWriting 52 }
-
如果正在扩容,并且操作的bucket还没搬迁完,那么搬迁bucket。
-
找出对应的key,如果key、value是包含指针的那么会清理指针指向的内存,否则不会回收内存。
3.6 map的扩容
通过上面的过程我们知道了,插入、删除过程都会触发扩容,判断扩容的函数如下:
1 // overLoadFactor 判断放置在1 << B个存储桶中的计数项目是否超过loadFactor。 2 func overLoadFactor(count int, B uint8) bool { 3 return count > bucketCnt && uintptr(count) > loadFactorNum*(bucketShift(B)/loadFactorDen) 4 //return 元素个数>8 && count>bucket数量*6.5,其中loadFactorNum是常量13,loadFactorDen是常量2,所以是6.5,bucket数量不算overflow bucket. 5 } 6 7 // tooManyOverflowBuckets 判断noverflow存储桶对于1 << B存储桶的map是否过多。 8 // 请注意,大多数这些溢出桶必须稀疏使用。如果使用密集,则我们已经触发了常规map扩容。 9 func tooManyOverflowBuckets(noverflow uint16, B uint8) bool { 10 // 如果阈值太低,我们会做多余的工作。如果阈值太高,则增大和缩小的映射可能会保留大量未使用的内存。 11 //“太多”意味着(大约)溢出桶与常规桶一样多。有关更多详细信息,请参见incrnoverflow。 12 if B > 15 { 13 B = 15 14 } 15 // 译器在这里看不到B <16;掩码B生成较短的移位码。 16 return noverflow >= uint16(1)<<(B&15) 17 } 18 19 { 20 .... 21 // 如果我们达到最大负载率或溢流桶过多,并且我们还没有处于成长的中间,就开始成长。 22 if !h.growing() && (overLoadFactor(h.count+1, h.B) || tooManyOverflowBuckets(h.noverflow, h.B)) { 23 hashGrow(t, h) 24 goto again // 扩大表格会使所有内容失效,so try again 25 } 26 //if (不是正在扩容 && (元素个数/bucket数超过某个值 || 太多overflow bucket)) { 27 进行扩容 28 //} 29 .... 30 }
每次map进行更新或者新增的时候,会先通过以上函数判断一下load factor。来决定是否扩容。如果需要扩容,那么第一步需要做的,就是对hash表进行扩容:
1 //仅对hash表进行扩容,这里不进行搬迁 2 func hashGrow(t *maptype, h *hmap) { 3 // 如果达到负载系数,则增大尺寸。否则,溢出bucket过多,因此,保持相同数量的存储桶并横向“增长”。 4 bigger := uint8(1) 5 if !overLoadFactor(h.count+1, h.B) { 6 bigger = 0 7 h.flags |= sameSizeGrow 8 } 9 oldbuckets := h.buckets 10 newbuckets, nextOverflow := makeBucketArray(t, h.B+bigger, nil) 11 12 flags := h.flags &^ (iterator | oldIterator) 13 if h.flags&iterator != 0 { 14 flags |= oldIterator 15 } 16 // 提交增长(atomic wrt gc) 17 h.B += bigger 18 h.flags = flags 19 h.oldbuckets = oldbuckets 20 h.buckets = newbuckets 21 h.nevacuate = 0 22 h.noverflow = 0 23 24 if h.extra != nil && h.extra.overflow != nil { 25 // 将当前的溢出bucket提升到老一代。 26 if h.extra.oldoverflow != nil { 27 throw("oldoverflow is not nil") 28 } 29 h.extra.oldoverflow = h.extra.overflow 30 h.extra.overflow = nil 31 } 32 if nextOverflow != nil { 33 if h.extra == nil { 34 h.extra = new(mapextra) 35 } 36 h.extra.nextOverflow = nextOverflow 37 } 38 39 //哈希表数据的实际复制是增量完成的,通过growWork()和evacuate()。 40 }
如果之前为2^n ,那么下一次扩容是2^(n+1),每次扩容都是之前的两倍。扩容后需要重新计算每一项在hash中的位置,新表为老的两倍,此时前文的oldbacket用上了,用来存同时存在的两个新旧map,等数据迁移完毕就可以释放oldbacket了。扩容的函数hashGrow其实仅仅是进行一些空间分配,字段的初始化,实际的搬迁操作是在growWork函数中:
1 func growWork(t *maptype, h *hmap, bucket uintptr) { 2 //确保我们迁移了了对应的oldbucket,到我们将要使用的存储桶。 3 evacuate(t, h, bucket&h.oldbucketmask()) 4 5 // 疏散一个旧桶以在生长上取得进展 6 if h.growing() { 7 evacuate(t, h, h.nevacuate) 8 } 9 }
优点:均摊扩容时间,一定程度上缩短了扩容时间(和gc的引用计数法类似,都是均摊)overLoadFactor函数中有一个常量6.5(loadFactorNum/loadFactorDen)来进行影响扩容时机。这个值的来源是测试取中的结果。
4. map的并发安全性
map的并发操作不是安全的。并发起两个goroutine,分别对map进行数据的增加:
1 func main() { 2 test := map[int]int {1:1} 3 go func() { 4 i := 0 5 for i < 10000 { 6 test[1]=1 7 i++ 8 } 9 }() 10 11 go func() { 12 i := 0 13 for i < 10000 { 14 test[1]=1 15 i++ 16 } 17 }() 18 19 time.Sleep(2*time.Second) 20 fmt.Println(test) 21 } 22 23 //fatal error: concurrent map read and map write
并发读写map结构的数据引起了错误。
解决方案1:加锁
1 func main() { 2 test := map[int]int {1:1} 3 var s sync.RWMutex 4 go func() { 5 i := 0 6 for i < 10000 { 7 s.Lock() 8 test[1]=1 9 s.Unlock() 10 i++ 11 } 12 }() 13 14 go func() { 15 i := 0 16 for i < 10000 { 17 s.Lock() 18 test[1]=1 19 s.Unlock() 20 i++ 21 } 22 }() 23 24 time.Sleep(2*time.Second) 25 fmt.Println(test) 26 }
特点:实现简单粗暴,好理解。但是锁的粒度为整个map,存在优化空间。适用场景:all。
解决方案2:sync.Map
1 func main() { 2 test := sync.Map{} 3 test.Store(1, 1) 4 go func() { 5 i := 0 6 for i < 10000 { 7 test.Store(1, 1) 8 i++ 9 } 10 }() 11 12 go func() { 13 i := 0 14 for i < 10000 { 15 test.Store(1, 1) 16 i++ 17 } 18 }() 19 20 time.Sleep(time.Second) 21 fmt.Println(test.Load(1)) 22 }
sync.Map的原理:sync.Map里头有两个map一个是专门用于读的read map,另一个是才是提供读写的dirty map;优先读read map,若不存在则加锁穿透读dirty map,同时记录一个未从read map读到的计数,当计数到达一定值,就将read map用dirty map进行覆盖。
特点:官方出品,通过空间换时间的方式,读写分离;不适用于大量写的场景,会导致read map读不到数据而进一步加锁读取,同时dirty map也会一直晋升为read map,整体性能较差。适用场景:大量读,少量写。
解决方案3:分段锁
这也是数据库常用的方法,分段锁每一个读写锁保护一段区间。sync.Map其实也是相当于表级锁,只不过多读写分了两个map,本质还是一样的。
优化方向:将锁的粒度尽可能降低来提高运行速度。思路:对一个大map进行hash,其内部是n个小map,根据key来来hash确定在具体的那个小map中,这样加锁的粒度就变成1/n了。例如
5. map的GC内存回收
golang里的map是只增不减的一种数组结构,他只会在删除的时候进行打标记说明该内存空间已经empty了,不会回收。
1 var intMap map[int]int 2 3 func main() { 4 printMemStats("初始化") 5 6 // 添加1w个map值 7 intMap = make(map[int]int, 10000) 8 for i := 0; i < 10000; i++ { 9 intMap[i] = i 10 } 11 12 // 手动进行gc操作 13 runtime.GC() 14 // 再次查看数据 15 printMemStats("增加map数据后") 16 17 log.Println("删除前数组长度:", len(intMap)) 18 for i := 0; i < 10000; i++ { 19 delete(intMap, i) 20 } 21 log.Println("删除后数组长度:", len(intMap)) 22 23 // 再次进行手动GC回收 24 runtime.GC() 25 printMemStats("删除map数据后") 26 27 // 设置为nil进行回收 28 intMap = nil 29 runtime.GC() 30 printMemStats("设置为nil后") 31 } 32 33 func printMemStats(mag string) { 34 var m runtime.MemStats 35 runtime.ReadMemStats(&m) 36 log.Printf("%v:分配的内存 = %vKB, GC的次数 = %v\n", mag, m.Alloc/1024, m.NumGC) 37 } 38 39 //初始化:分配的内存 = 65KB, GC的次数 = 0 40 //增加map数据后:分配的内存 = 381KB, GC的次数 = 1 41 //删除前数组长度: 10000 42 //删除后数组长度: 0 43 //删除map数据后:分配的内存 = 381KB, GC的次数 = 2 44 //设置为nil后:分配的内存 = 68KB, GC的次数 = 3
可以看到delete是不会真正的把map释放的,所以要回收map还是需要设为nil
sync.Map的原理详解:https://www.jianshu.com/p/ec51dac3c65b 由浅入深sync.Map

 浙公网安备 33010602011771号
浙公网安备 33010602011771号