霍夫变换的基本理解(第八天)
千万注意:使用opencv自带的霍夫API
HoughLinesP():此函数输入的是一个二进制且八位的图像,例如:你不能用cvtcolor()变换之后直接输入。
HoughCircles():此函数输入的是一个灰度且八位的图像,例如:你不能经过threshold()、findcontours()等之后的图像进行输入。
我现在还不知道经过二值化的图像怎么转化为灰度图。。。。会了再补充。
---霍夫直线变换---
源程序没有分析,只是分析了基本的原理。。。等以后用到之后再进行分析
首先回顾一下坐标系的概念--->>>
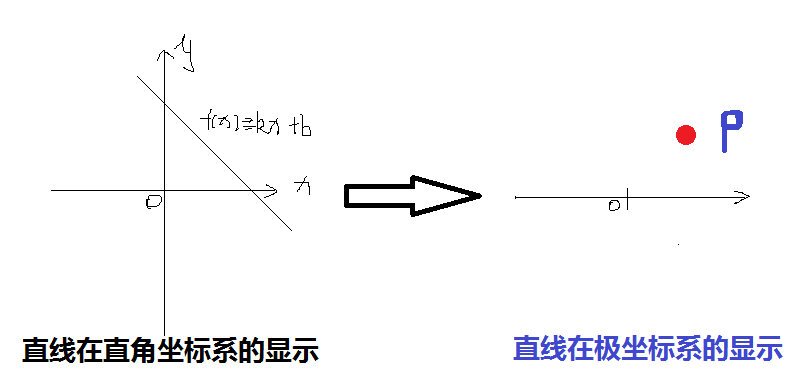

1.直角坐标系(直线)<--->极坐标系(点),极坐标系(直线)<--->直角坐标系(点)。相互对应的关系
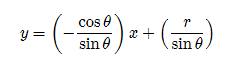
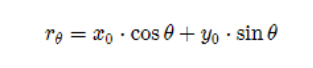
2.推导的公式很简单,看一下就懂了。
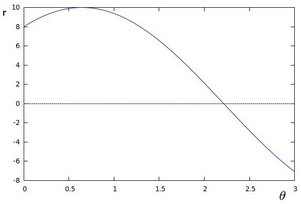
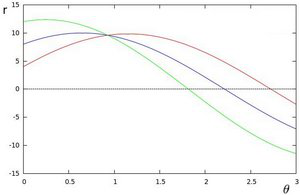
3.对于第三个公式,我们给定一个(x0,y0),就是图像的一个像素点(这个图是经过滤波、灰度、梯度等处理的),那么这个点在极坐标就可以画出一条直线。因为在极坐标看的不明显,把这个函数画在直角坐标系显示(图一),就类似三角函数的图像。现在我们再给定点(x1,y1)、(x2,y2)。。。进行同样的方法画图(图二),这个点在直角坐标系就是一条直线,那么多重合的点,就说明很多的像素点在这个直线上,我们设定一个阈值L,当点的重合率大于这个阈值就认定是直线。
4.有点饶人,直角和极坐标相互的转化实现。
图一
图二
上面的原理是可以运行的:
1.效率太低了,试想一下图像边缘非常的多,如果每一个像素点都进行计算的话,那太费时费事了。
2.线段的端点没办法检测。
3.对于相近的线段没办法区分。
HoughLinesP函数就是利用概率霍夫变换来检测直线的。它的一般步骤为:
1、随机抽取图像中的一个特征点,即边缘点,如果该点已经被标定为是某一条直线上的点,则继续在剩下的边缘点中随机抽取一个边缘点,直到所有边缘点都抽取完了为止;
2、对该点进行霍夫变换,并进行累加和计算;
3、选取在霍夫空间内值最大的点,如果该点大于阈值的,则进行步骤4,否则回到步骤1;
4、根据霍夫变换得到的最大值,从该点出发,沿着直线的方向位移,从而找到直线的两个端点;
5、计算直线的长度,如果大于某个阈值,则被认为是好的直线输出,回到步骤1。
opencv霍夫直线变换:
houghlines()--->>>
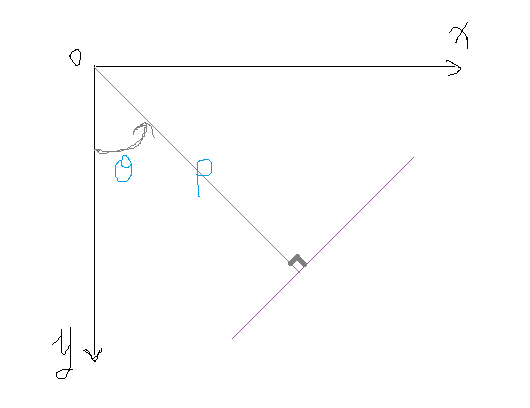
其返回的是(ρ,Θ),ρ代表距离(0,0)点到直线的欧几里得距离,也就是直线距离。Θ代表的是(0,0)点垂直直线然后与Y轴的夹角。
houghlinesP()--->>>
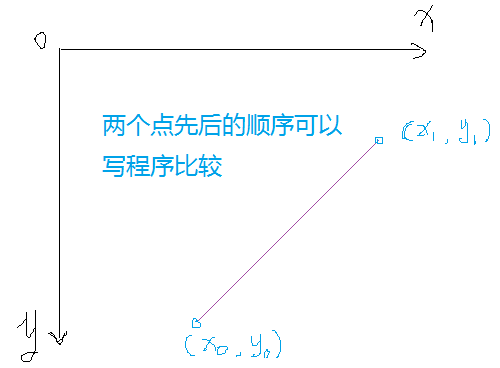
返回的是直线两个点:(x0,y0)(x1,y1)
刚开始我看不起houghlines函数,感觉效率低,后来基本上都是用houghlinesP的,但是这次实现文本的转正就用到了,这两个用途不一样吧!
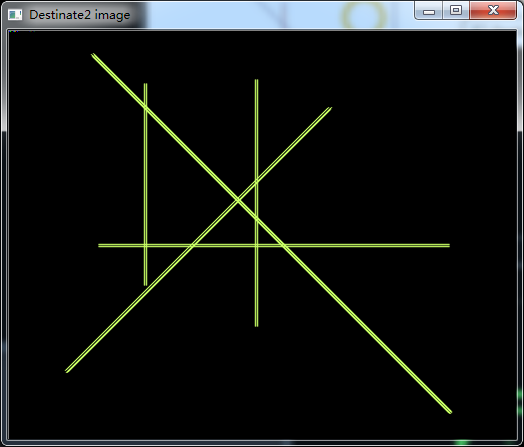
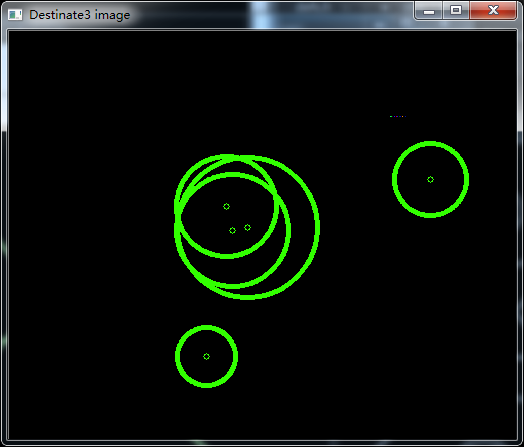
---霍夫圆变换---
圆变换的想法和直线变化是一样的,就是把直角坐标系中的圆画在极坐标系中,然后求交点
第一阶段:检测圆心
1.1、对输入图像边缘检测;
1.2、计算图形的梯度,并确定圆周线,其中圆周的梯度就是它的法线;
1.3、在二维霍夫空间内,绘出所有图形的梯度直线,某坐标点上累加和的值越大,说明在该点上直线相交的次数越多,也就是越有可能是圆心;
1.4、在霍夫空间的4邻域内进行非最大值抑制;
1.5、设定一个阈值,霍夫空间内累加和大于该阈值的点就对应于圆心。
第二阶段:检测圆半径
2.1、计算某一个圆心到所有圆周线的距离,这些距离中就有该圆心所对应的圆的半径的值,这些半径值当然是相等的,并且这些圆半径的数量要远远大于其他距离值相等的数量;
2.2、设定两个阈值,定义为最大半径和最小半径,保留距离在这两个半径之间的值,这意味着我们检测的圆不能太大,也不能太小;
2.3、对保留下来的距离进行排序;
2.4、找到距离相同的那些值,并计算相同值的数量;
2.5、设定一个阈值,只有相同值的数量大于该阈值,才认为该值是该圆心对应的圆半径;
2.6、对每一个圆心,完成上面的2.1~2.5步骤,得到所有的圆半径。
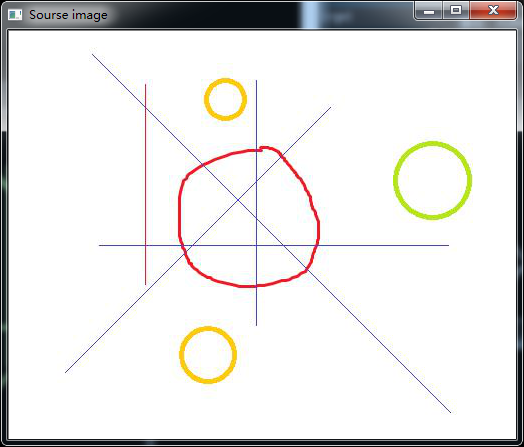
opencv实例:
1 #include<iostream> 2 #include <opencv2/opencv.hpp> 3 #include <math.h> 4 using namespace cv; 5 using namespace std; 6 7 int main(int argc,char**argv) 8 { 9 Mat input_image = imread("1.jpg"); 10 if (input_image.data==NULL) { 11 return -1; cout << "can't open image.../"; 12 } 13 imshow("Sourse image", input_image); 14 Mat mid_image,output_image, mid_image1; 15 mid_image.create(input_image.size(),input_image.type()); 16 mid_image1.create(input_image.size(), input_image.type()); 17 cvtColor(input_image,output_image,COLOR_BGR2GRAY); 18 GaussianBlur(output_image,output_image,Size(3,3),2,2); 19 Canny(output_image, output_image,50,200); 20 vector<Vec4i> lines; 21 vector<Vec3f> circles; 22 HoughLinesP(output_image,lines,1,CV_PI/180,80,50,10); 23 HoughCircles(output_image,circles,HOUGH_GRADIENT,1.5,10,200,100,0,0); 24 for (size_t i = 0; i < lines.size(); i++) 25 { 26 Vec4i l; 27 l = lines[i]; 28 line(mid_image,Point(l[0],l[1]),Point(l[2],l[3]),Scalar(100,255,200),1,LINE_AA); 29 } 30 imshow("Destinate1 image", output_image); 31 imshow("Destinate2 image", mid_image); 32 for (size_t j = 0; j < circles.size(); j++) 33 { 34 Vec3f c; 35 c = circles[j]; 36 circle(mid_image1, Point(cvRound(c[0]), cvRound(c[1])), 3, Scalar(0, 255, 50)); 37 circle(mid_image1, Point(cvRound(c[0]), cvRound(c[1])), cvRound(c[2]), Scalar(0, 255, 50),3,8,0); 38 } 39 imshow("Destinate3 image", mid_image1); 40 waitKey(0); 41 return 0; 42 }

opencv自带的API主要就是参数的设置,设置不好的参数要么检测的不好,要么根本检测不到直线和圆!
1.圆的检测是找不到同心圆的
2.很容易受噪声干扰
3.必须非常的圆度,椭圆不行
主要参考:http://blog.csdn.net/zhaocj/article/details/50454847
-------------------------------------------
个性签名:衣带渐宽终不悔,为伊消得人憔悴!
如果觉得这篇文章对你有小小的帮助的话,记得关注再下的公众号,同时在右下角点个“推荐”哦,博主在此感谢!


 浙公网安备 33010602011771号
浙公网安备 33010602011771号