
ToF相机学习笔记之基本知识
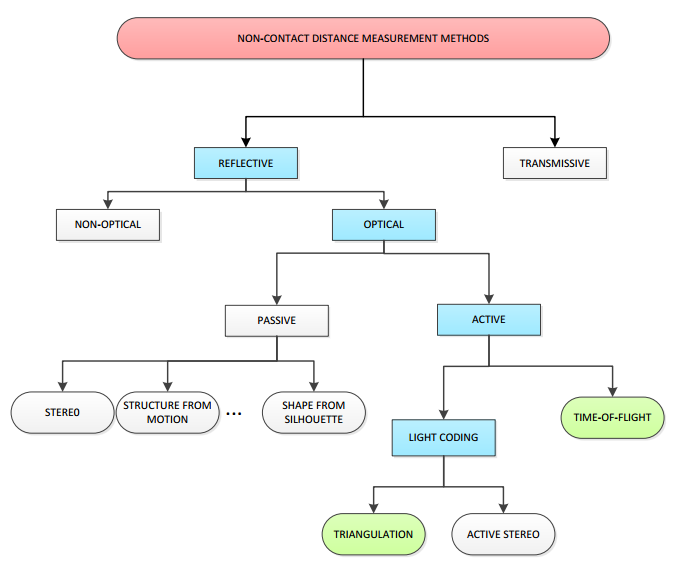
ToF相机属于一种非接触式光学传感器,通过计算发射激光的飞行时间获取对应像素的深度信息。就非接触式距离测量方法而言,其分类可用下表表示如下:
1.1 ToF传感器基础
一个逐点式的ToF传感器采用了雷达原理估计场景点的径向距离。简单来说,就是通过计算光从发射到经场景点反射后的飞行时间。为了测量整个场景表面而不是几个场景点,很多距离测量系统集成了一个逐点式ToF传感器在一个场景扫描机构上。不同于那些通过逐点扫描方式获取场景几何结构的ToF传感器,矩阵式深度传感器通过将很多ToF传感器集成到一个阵列面上,形成一个矩阵。这样通过矩阵式ToF拍摄一张场景图片即可实时获取整个场景的表面几何结构信息。
除了以上这些简单的概念性原理,通过time of flight实现深度值测量方法的背后还隐藏着许多很有挑战性的技术。例如ToF相机需要5ps来覆盖1mm的路径,那么就需要一个时钟来对5ps的单步时长进行计量。不同的时钟技术选择导致了不同的ToF相机类型。当前市面上大部分是基于连续波(continuous wave)强度调制方法,还有一些是基于光学快门的方法,这里就不做过多的介绍。
1.2 CW ToF传感器的工作原理
连续波长深度传感器通过向场景表面发送一个正弦波信号,振幅为AE,调制频率为fmod:


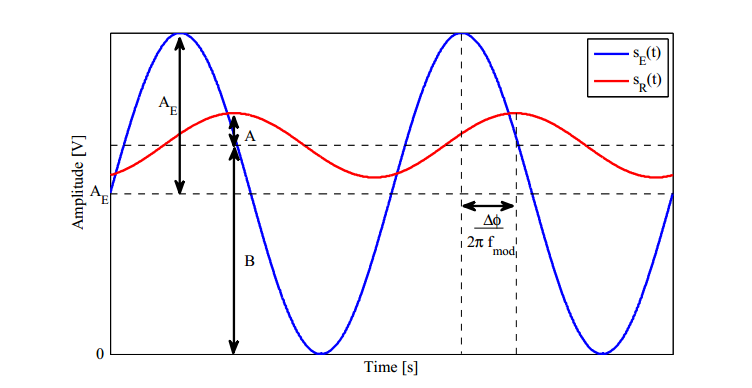

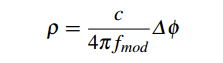
上式中有三个未知量A, B 和ΔΦ,其中A和B是IR射线振幅,ΔΦ是一个纯数字的相位值。最重要的未知量就是ΔΦ,因为ΔΦ是一个跟测量距离ρ相关的量,故有

或等价表示为
2 ToF相机使用注意事项
2.1 温度要求
当使用SR4000/SR4500时,官方建议相机所处的使用环境温度应不高于50摄氏度,过多的热量会显著地增加相机的热敏误差。另外,相机的曝光(积分)时间增加,也会是LED的激活时间被延长,由此会带来更多的工作热量。为了减少这部分热量,可以考虑采用触发模式来代替连续采集模式。
2.2 电压
SR4500供电电压为24V直流电,上下浮动10%。如果工作电压小于最小电压,相机的测量精度会下降。如果供电电压过高,则会使用相机发热,最终也会影响测量精度。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号