


CUDA ---- GPU架构(Fermi、Kepler)
GPU架构
SM(Streaming Multiprocessors)是GPU架构中非常重要的部分,GPU硬件的并行性就是由SM决定的。
以Fermi架构为例,其包含以下主要组成部分:
- CUDA cores
- Shared Memory/L1Cache
- Register File
- Load/Store Units
- Special Function Units
- Warp Scheduler
GPU中每个SM都设计成支持数以百计的线程并行执行,并且每个GPU都包含了很多的SM,所以GPU支持成百上千的线程并行执行,当一个kernel启动后,thread会被分配到这些SM中执行。大量的thread可能会被分配到不同的SM,但是同一个block中的thread必然在同一个SM中并行执行。
CUDA采用Single Instruction Multiple Thread(SIMT)的架构来管理和执行thread,这些thread以32个为单位组成一个单元,称作warps。warp中所有线程并行的执行相同的指令。每个thread拥有它自己的instruction address counter和状态寄存器,并且用该线程自己的数据执行指令。
SIMT和SIMD(Single Instruction, Multiple Data)类似,SIMT应该算是SIMD的升级版,更灵活,但效率略低,SIMT是NVIDIA提出的GPU新概念。二者都通过将同样的指令广播给多个执行官单元来实现并行。一个主要的不同就是,SIMD要求所有的vector element在一个统一的同步组里同步的执行,而SIMT允许线程们在一个warp中独立的执行。SIMT有三个SIMD没有的主要特征:
- 每个thread拥有自己的instruction address counter
- 每个thread拥有自己的状态寄存器
- 每个thread可以有自己独立的执行路径
一个block只会由一个SM调度,block一旦被分配好SM,该block就会一直驻留在该SM中,直到执行结束。一个SM可以同时拥有多个block。下图显示了软件硬件方面的术语:

需要注意的是,大部分thread只是逻辑上并行,并不是所有的thread可以在物理上同时执行。这就导致,同一个block中的线程可能会有不同步调。
并行thread之间的共享数据回导致竞态:多个线程请求同一个数据会导致未定义行为。CUDA提供了API来同步同一个block的thread以保证在进行下一步处理之前,所有thread都到达某个时间点。不过,我们是没有什么原子操作来保证block之间的同步的。
同一个warp中的thread可以以任意顺序执行,active warps被SM资源限制。当一个warp空闲时,SM就可以调度驻留在该SM中另一个可用warp。在并发的warp之间切换是没什么消耗的,因为硬件资源早就被分配到所有thread和block,所以该新调度的warp的状态已经存储在SM中了。
SM可以看做GPU的心脏,寄存器和共享内存是SM的稀缺资源。CUDA将这些资源分配给所有驻留在SM中的thread。因此,这些有限的资源就使每个SM中active warps有非常严格的限制,也就限制了并行能力。所以,掌握部分硬件知识,有助于CUDA性能提升。
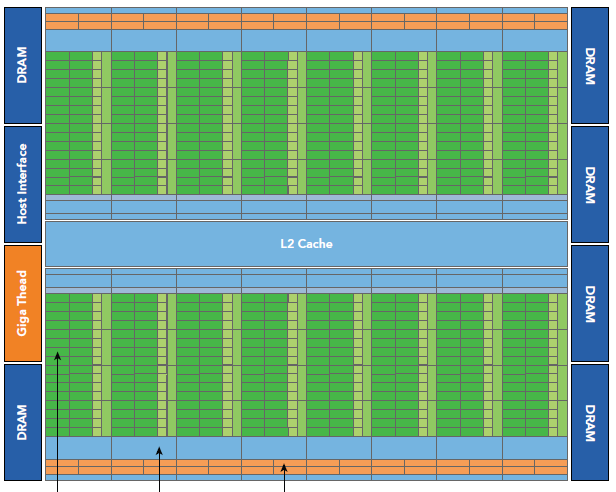
Fermi架构
Fermi是第一个完整的GPU计算架构。
- 512个accelerator cores即所谓CUDA cores(包含ALU和FPU)
- 16个SM,每个SM包含32个CUDA core
- 六个384位 GDDR5 DRAM,支持6GB global on-board memory
- GigaThread engine(图左侧)将thread blocks分配给SM调度
- 768KB L2 cache
- 每个SM有16个load/store单元,允许每个clock cycle为16个thread(即所谓half-warp,不过现在不提这个东西了)计算源地址和目的地址
- Special function units(SFU)用来执行sin cosine 等
- 每个SM两个warp scheduler两个instruction dispatch unit,当一个block被分配到一个SM中后,所有该block中的thread会被分到不同的warp中。
- Fermi(compute capability 2.x)每个SM同时可处理48个warp共计1536个thread。
每个SM由一下几部分组成:
- 执行单元(CUDA cores)
- 调度分配warp的单元
- shared memory,register file,L1 cache
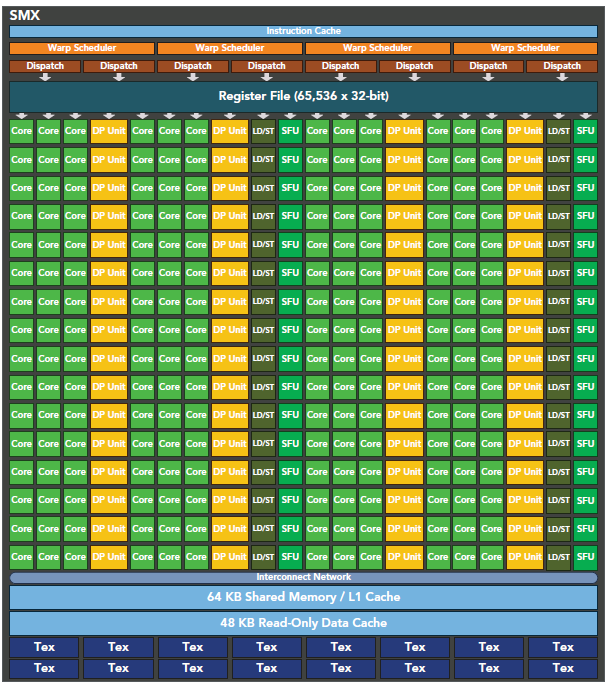
Kepler 架构
Kepler相较于Fermi更快,效率更高,性能更好。
- 15个SM
- 6个64位memory controller
- 192个单精度CUDA cores,64个双精度单元,32个SFU,32个load/store单元(LD/ST)
- 增加register file到64K
- 每个Kepler的SM包含四个warp scheduler、八个instruction dispatchers,使得每个SM可以同时issue和执行四个warp。
- Kepler K20X(compute capability 3.5)每个SM可以同时调度64个warp共计2048个thread。

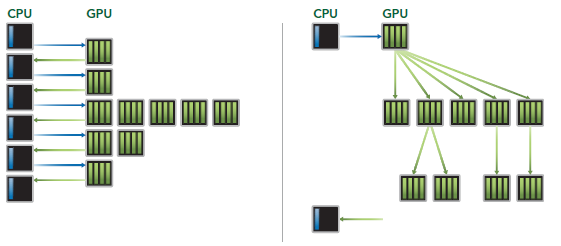
Dynamic Parallelism
Dynamic Parallelism是Kepler的新特性,允许GPU动态的启动新的Grid。有了这个特性,任何kernel内都可以启动其它的kernel了。这样直接实现了kernel的递归以及解决了kernel之间数据的依赖问题。也许D3D中光的散射可以用这个实现。
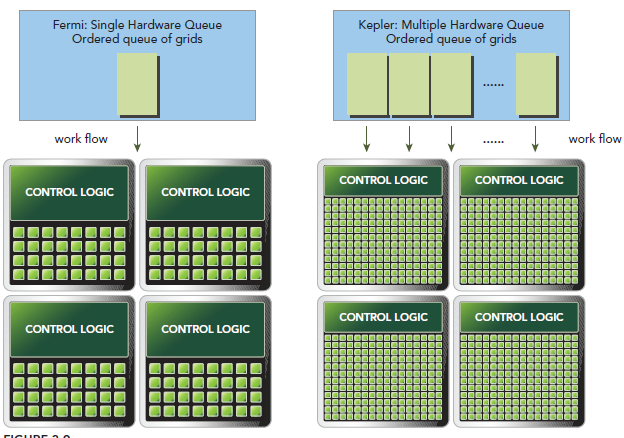
Hyper-Q
Hyper-Q是Kepler的另一个新特性,增加了CPU和GPU之间硬件上的联系,使CPU可以在GPU上同时运行更多的任务。这样就可以增加GPU的利用率减少CPU的闲置时间。Fermi依赖一个单独的硬件上的工作队列来从CPU传递任务给GPU,这样在某个任务阻塞时,会导致之后的任务无法得到处理,Hyper-Q解决了这个问题。相应的,Kepler为GPU和CPU提供了32个工作队列。
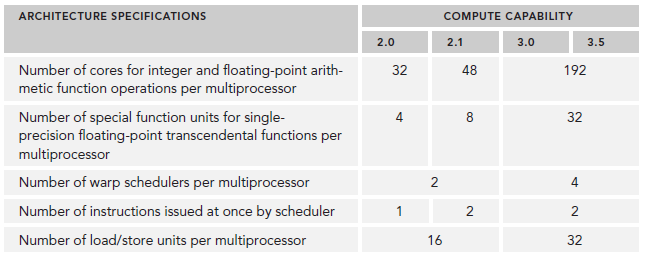
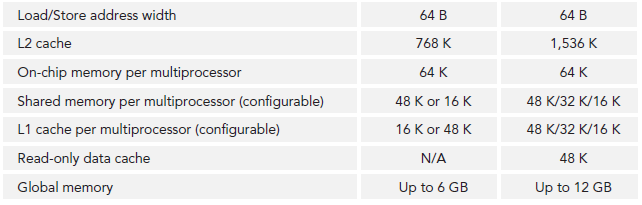
不同arch的主要参数对比

 浙公网安备 33010602011771号
浙公网安备 33010602011771号