二自由度舵机云台球面角度、坐标转换笔记
二自由度舵机云台分别由两个舵机组成,通过两个舵机的协调,可以将最上方的云台转到任意目标位置。
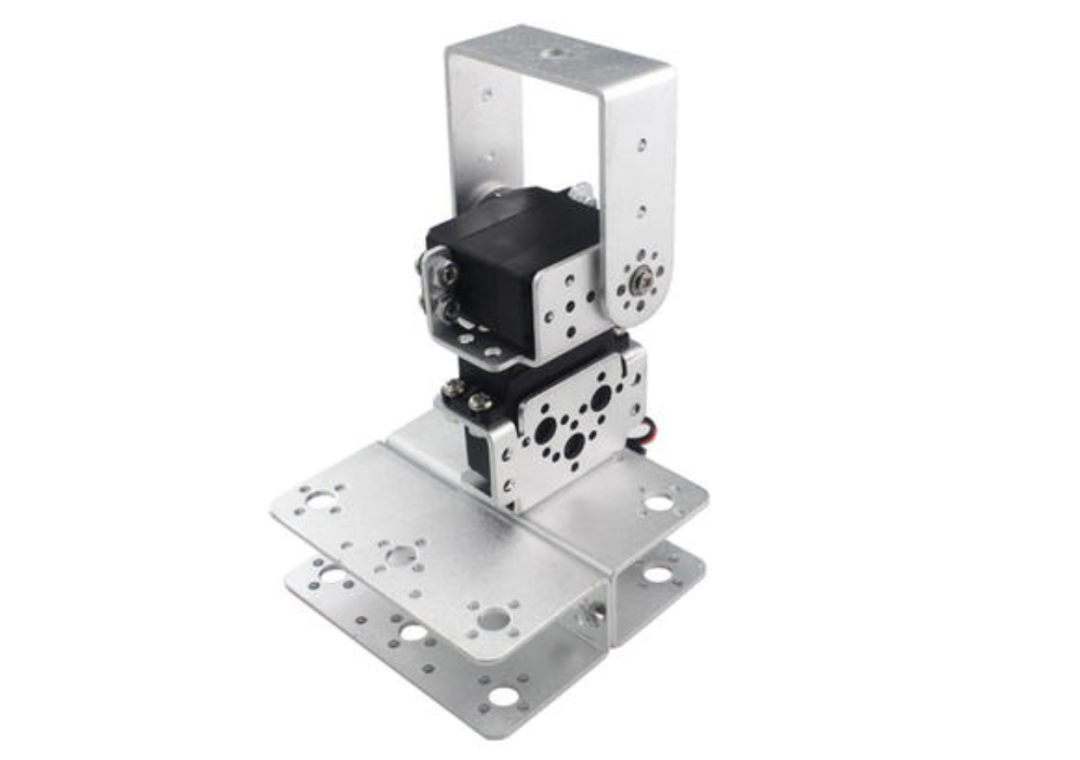
在转动过程中到底转了多少度、坐标是多少,都是需要实时可控的,因此要求写一套简单的算法求出当前云台的坐标。
设 \(\alpha\) 为向量与 XOY 平面夹角,\(\beta\) 为向量在 XOY 平面的投影与 OX 轴夹角。
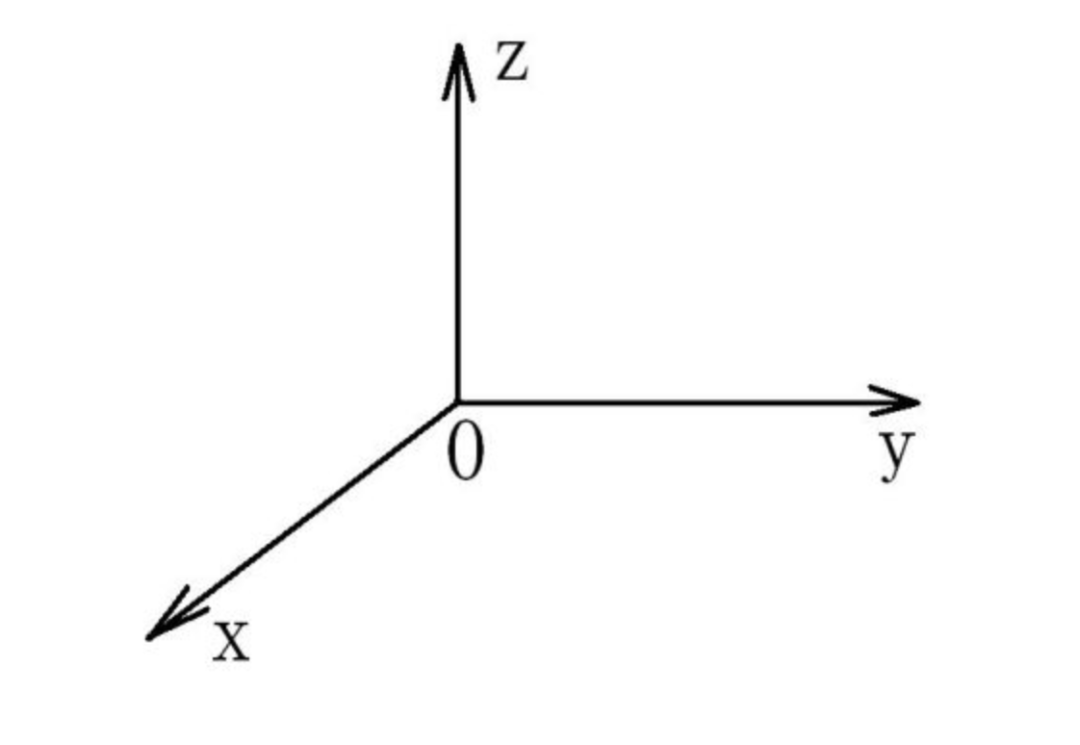
所以云台三个轴的坐标值可通过如下公式求得:
- \(x = r * \cos\alpha * \cos\beta\)
- \(y = r * \cos\alpha * \sin\beta\)
- \(z = r * \sin\alpha\)
范围:\(\dfrac{-\pi}{2}<=\alpha<=\dfrac{\pi}{2}\),\(0<=\beta<=2\pi\)
所以按照上述公式计算 \(\left(x,y,z\right)\) 坐标时,只要求出 \(\alpha\) 角和 \(\beta\) 角即可。
在写程序前,需要一个能够计算 cos 和 sin 的函数如下:
const double kServoPi = 3.14159265; // π
// sin(x) 函数
double Servo_Sin(double rad) {
int8 _flag = 1;
double sine;
if (rad >= kServoPi) {
rad -= kServoPi;
_flag = -1;
}
if (rad < 0)
sine = rad * (1.27323954f + 0.405284735f * rad);
else
sine = rad * (1.27323954f - 0.405284735f * rad);
if (sine < 0)
sine = sine * (-0.225f * (sine + 1) + 1);
else
sine = sine * (0.225f * (sine - 1) + 1);
return sine * _flag;
}
// cos(x) 函数
float Servo_Cos(double rad) {
int8 _flag = 1;
rad += kServoPi / 2.0;
if (rad >= kServoPi) {
_flag = -1;
rad -= kServoPi;
}
return Servo_Sin(rad) * _flag;
}
cos 和 sin 的函数准备好后,那么就可以开始计算舵机角度了。
该套算法通过获取当前舵机的占空比值与已确定的舵机最小、最大占空比值的差值进行相应计算,转换为角度,而后再由角度计算得出云台三轴坐标值。因此程序本身并逻辑不难。
struct PanTilt {
float coordinate_x; // 云台 x 轴坐标
float coordinate_y; // 云台 y 轴坐标
float coordinate_z; // 云台 z 轴坐标
};
struct PanTilt pan_tilt = {0, 0, 0};
// 舵机角度坐标计算。输入变量 _pwm1 为上面舵机的占空比,_pwm2 下面舵机的占空比
void Servo_Coordinates_Calculate(uint16 _pwm1, uint16 _pwm2) {
// 上面的舵机转到最上侧的占空比,转到正中间的占空比,转到最下侧的占空比
const float up_servo_high_pwm = 1105, up_servo_mid_pwm = 672.5, up_servo_low_pwm = 240;
// 下面的舵机转到最左侧的占空比,转到最右侧的占空比
const float dw_servo_left_pwm = 1105, dw_servo_right_pwm = 234;
// 云台旋转半径为 51mm
const float r = 51;
// 定义云台的 α 角和 β 角静态变量
static float _angle_alpha = 0, _angle_beta = 0;
// 计算云台的 α 角和 β 角
_angle_alpha = kServoPi * ((float)(_pwm1)-up_servo_mid_pwm) / (up_servo_high_pwm - up_servo_low_pwm);
_angle_beta = kServoPi * ((float)(_pwm2)-dw_servo_right_pwm) / (dw_servo_left_pwm - dw_servo_right_pwm);
// 计算云台的 x, y, z 三轴坐标值
pan_tilt.coordinate_x = r * Servo_Cos(_angle_alpha) * Servo_Cos(_angle_beta);
pan_tilt.coordinate_y = r * Servo_Cos(_angle_alpha) * Servo_Sin(_angle_beta);
pan_tilt.coordinate_z = r * Servo_Sin(_angle_alpha);
}
因此,云台的角度以及 x, y, z 三轴坐标值均可以算出,需要使用数据的时候,直接调用结果即可。如上程序还有很多需要优化的地方,仅供参考。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号