


1 数值方法A
1 数值方法A
课堂笔记
基础
主要是针对N-S方程求解,有三种方法:有限体积、有限元、有限差分。
微分:
$$\underset{\Delta x \to 0}{lim} \frac{f(x_0+\Delta x)-f(x_0)}{\Delta x}=\frac{dy}{dx}$$
不同尺度下物质密度:分子尺度$l_m$<<连续体$\eta$<<地理尺度L(教室、地球...)

本课程研究连续体尺度的问题。
一维稳态扩散及其求解
一维动量守恒
在高中阶段,我们已经学习了关于动量的两个基本公式:
$$P=mV\\\sum F=\frac{dp}{dt}$$现在,让我们考虑一个流体微元,其体积为$dV=Adx$(参见下面讲控制体积时的图),质量为$dm=\rho dV=\rho Adx$,速度为$u$。
(注意:这里$u=\frac{dx}{dt}$表示一个流体微元的位置x随着时间t的变化率;稳态下,$\frac{\partial u}{\partial t}=0$,即流体微元的运动速度在流场中的分布不随时间变化,但流体微元的位置x仍然会随着时间变化。)
对于单位时间内,通过某一截面的动量(在时间 $dt$ 内,有一段厚度 $dx=u\,dt$ 的流体薄片穿过这个截面):
对于一个截面A,在一段极短的时间 dt 内,以速度 u 运动的流体会向前移动一小段距离 dx。
因此,在 dt 这段时间内,所有通过截面 A 的流体,会形成一个厚度为 dx、底面积为 A 的“流体薄片”或“小圆柱”。这个“流体薄片”的体积 dV 就是:
$$dV = Adx = A(udt)=(uA)dt$$其质量为密度 ρ 与体积 dV 的乘积:
$$dm = \rho \cdot dV = \rho(uA\cdot dt)$$其动量为质量与速度的乘积:
$$dP=dm\cdot u=\rho(uA\cdot dt)\cdot u = \rho u^2 A\cdot dt$$其动量密度(每单位体积动量)为ρu。
下一步,计算其动量流量,即动量随时间的变化率:
$$动量流量Q=\frac{dP}{dt}=\frac{\rho u^2 A\cdot dt}{dt}=\rho u^2 A$$若只考虑一维,则可让A=1,动量流量=$\rho u^2$。
接下来,对流体元进行受力分析:
- 考虑沿x方向,左侧(位置x)的压强为p,受到压力$F_{left}=pA$,方向向右;
- 右端(位置x+dx)的压强为p+dp,受到压力$F_{right} = (p+dp)A$,方向向左;
- 合外力为$F_{net} = -dp\cdot A$(令向右为正方向);
- 代入$dp = \frac{dp}{dx} dx$,可得$F_{net} = -\frac{dp}{dx} Adx$。
下一步,考虑流体元的加速度:
-
$a = \frac{du}{dt}$;
-
速度 u 是位置 x 的函数,即 u(x),而位置 x 又是时间 t 的函数,即 x(t),根据链式法则:
$$a = \frac{du}{dt} = \frac{du}{dx}\cdot \frac{dx}{dt}$$ -
又因为$\frac{dx}{dt}$就是流体元的速度u,故有:
$$a = u\frac{du}{dx}$$这个加速度是对流加速度,是即使在稳态流中也存在的加速度。
下一步,利用牛顿第二定理,F=ma:
$$F_{net} = -\frac{dp}{dx} Adx=(\rho Adx)\cdot (u\frac{du}{dx})$$消元可得:
$$-\frac{dp}{dx}=\rho u \frac{du}{dx}$$其中,$-\frac{dp}{dx}$是压力梯度,$\rho u$代表质量流量,$\frac{du}{dx}$表示速度梯度。
令$F(u)=\frac{1}{2} u^2$:
$$\frac{dF(u)}{dx}=\frac{dF}{du}\cdot \frac{du}{dx}=u\frac{du}{dx}$$$$-\frac{dp}{dx}=\rho u \frac{du}{dx}=\rho \frac{d(\frac{u^2}{2})}{dx}$$这里,$\frac{d(\frac{u^2}{2})}{dx}$表示动能梯度。
所以,当流体从高压区流向低压区时,压力梯度驱使流体加速,压力变化转化为流体动能,导致速度和动量的变化。
进一步推导:
$$\int_{x_1}^{x_2} -dp=\int_{x_1}^{x_2} \rho d(\frac{1}{2}u^2)$$$$\int_{p_1}^{p_2} -dp=\int_{u_1}^{u_2} \rho d(\frac{1}{2}u^2)$$$$p_1-p_2=\frac{1}{2}\rho (u_2^2-u_1^2)$$即伯努利方程。
一维稳态扩散
扩散通量:根据傅里叶定律,对于某个物理量$\phi$,单位面积上、单位时间内通过的量,与其梯度成正比。
$$J=-\Gamma \frac{d\phi}{dx}$$
其中,$\Gamma$是扩散系数,因为扩散是从高浓度向低浓度,故这里用负号。
对扩散通量公式求导得:
$$\frac{dJ}{dx}=\frac{d}{dx}(-\Gamma \frac{d\phi}{dx})$$在稳态下,系统内部扩散的增减被源项平衡,即扩散通量变化与源项的和为0.
$$\frac{d}{dx} (\Gamma \frac{d \phi}{dx})+S(x,~\phi)=0$$扩散:任何物质(粒子、能量、动量...)由高浓度区域向低浓度区域传输,由浓度梯度驱动,无大规模物质对流。
式中:
- $\phi$表示待求的量(如温度、浓度、电势);
- $\Gamma$表示扩散系数,$\frac{d}{dx} (\Gamma \frac{d \phi}{dx})$是扩散项,表示待求量扩散的速度和系数随着空间x变化,代表能量传递的过程;
- S表示源项(生成)或耗散项(消耗),与空间x、变量$\phi$相关,代表驱动能量传递的力量.
在一维经壁热传导中,源项表示单位体积内热源或热汇的强度,如内部热源(材料本身由于其物理性质、化学反应,或内部有电阻,吸热、放热)。
但高温区域、低温区域、墙壁构成的总系统的能量变化为0,系统内部能量守恒。
稳态:$\frac{\partial}{\partial t}=0$,时间不再影响$\phi$的变化,扩散过程已经达到平衡。
应用:
-
剪应力的跨流扩散
$$\frac{d}{dx}(\mu \frac{du}{dx})-\frac{dp}{dy}=0$$式中:
- $\mu$是动态粘度,描述流体的剪切变形对剪应力的响应,反映了流体的粘性,是纯物质属性,单位$N\cdot s/m^2$;
- v(这里未出现)是动力粘度,是动态粘度与流体密度的比值,反映了流体在重力作用下的扩散性;
- $\frac{du}{dx}$表示速度梯度,反映了流体层之间的速度差异,$\frac{d}{dx}(\mu \frac{du}{dx})$代表剪应力的扩散;
- $\frac{dp}{dy}$是压力梯度,表示驱动流动的压力差,作为动量的来源。当流动完全发展时,$\frac{dp}{dy}=0$;
稳态:速度场和压力场不随时间变化;
描述层流条件下的粘性流体,在粘性影响下,流体的各层相对滑动,产生剪应力。
一维稳态扩散的应用2:经壁热传导
- 公式:

式中,$\lambda$为热导率,S代表系统中额外的热源/热汇。
边界条件:若绝热(adiabatic),$\frac{\partial T}{\partial x}=0$。
- 如何求数值解
基本思路是离散化,目标是化为如下形式:
$$\left\{\begin{matrix}a_{1,~1}T_1+a_{1,~2}T_2+...+a_{1,~n}T_n \\... \\a_{n,~1}T_1+a_{n,~2}T_2+...+a_{n,~n}T_n \end{matrix}\right.\Longrightarrow [A][T]=[B]$$在该矩阵中,$a_{i,~j}$表示描述第i个节点的控制方程中,和第j个节点(如左侧$a_{i,~i-1}$、自身$a_{i,~i}$、右侧$a_{i,~i+1}$)相关的系数;[B]表示所有不与温度相关的常数项。

如图所示,在x=0到x=L的空间内取n个点测温。注意,点1在左边墙上,点n在右边墙上(即边界条件)。
这里有:
$$\Delta x=\frac{L-0}{n-1}$$$$\frac{dT}{dx}\mid_i~\approx \frac{T_{i+1}-T_i}{\Delta x} \approx \frac{T_{i+1}-T_{i-1}}{2\Delta x}$$离散化的具体实现:使用有限体积法,将整个域离散为n个控制体积(control volume,CV)。
注意:正在经历热传导的墙壁块是三维的;只是热传导的方向只有一条方向/一个维度。

原公式如下:
$$\frac{d}{dx}(\lambda \frac{dT}{dx})+S(x,~T)=0$$根据控制体积,对上式进行积分,则有:
$$\int_v \frac{d}{dx}(\lambda \frac{dT}{dx})dV+\int_v S(x,~T)dV=0$$

参见上图,有$dV=Adx$,则:
$$\int_w^e \frac{d}{dx}(\lambda \frac{dT}{dx})Adx+\int_w^e S(x,~T)Adx=0$$这里W意为west,E意为east。

如图,设对阴影部分积分。
$$\int_a^b f(x)dx=f[a+\xi(b-a)]\cdot(b-a)$$其中$\xi$是0~1之间的任意常数。
又有$\int \frac{df(x)}{dx}dx=f(x)$,则方程可化为:
$$[\lambda\frac{dT}{dx}]_{w}^{e}+\bar{S}[x]_w^e=0$$$$(\lambda \frac{dT}{dx})_e-(\lambda \frac{dT}{dx})_w+\bar{S} \Delta x=0$$其中$\bar{S}$是控制体积内S的均值,相当于把复杂的$S(x,~T)$简化,便于后续线性化。
下一步是用中心差分法近似$\frac{dT}{dx}$。
首先,对温度函数$T(x)$用泰勒展开,其中由于2阶以上项计算复杂、对结果影响小,故忽略。
假设在节点之间温度线性变化。
$$T(x)=T(x_i)+(x-x_i)\frac{dT}{dx}|_{x_i}+\frac{(x-x_i)^2}2\frac{d^2T}{dT^2}|_{x_i}$$$$T(x_{P})=T(x_{e})-(\delta x)_{e^{-}}\cdot(-\frac{dT}{dx})|_{x_{e}}+\frac{(\delta x)_{e^{-}}^2}{2}\cdot(\frac{d^2T}{dT^2})|_{x_{e}}$$$$T(x_E)=T(x_e)-(\delta x)_{e^+}\cdot (\frac{dT}{dx})|_{x_e}+\frac{(\delta x)_{e^+}^2}2 \cdot(\frac{d^2T}{dT^2})|_{x_e}$$令e为P、E中点,则有$(\delta x)_{e^-}=(\delta x)_{e^+}=\frac{1}{2} (\delta x)_e$,故:
$$\frac{dT}{dx}|_{x_e}=\frac{T(x_E)-T(x_P)}{(\delta x)_e}$$回代入公式$(\lambda \frac{dT}{dx})_e-(\lambda \frac{dT}{dx})_w+\bar{S} \Delta x=0$得:
$$(\lambda \frac{dT}{dx})_e=\lambda_e \cdot \frac{T_E-T_P}{(\delta x)_e}$$$$(\lambda \frac{dT}{dx})_w=\lambda_w \cdot \frac{T_P-T_W}{(\delta x)_w}$$另有:
$$\bar{S}=S_p \cdot T_P+S_c$$把源项在控制体积内的均值$\bar{S}$线性化,其中$S_P$为线性系数(或斜率),$S_c$为常数项(或截距),二者均应当为常数。
那么,将我们得到的这三个公式组合起来,可以得到最终的线性化方程:
$$a_w T_w +a_p T_p+a_ET_E=b$$其中,代表三个节点(当前控制节点左边一个、它本身、右边一个)的系数,以及右边一项b,分别是:
$$\quad a_W=-\frac{\lambda_w}{\delta x_w}\quad a_P=\frac{\lambda_w}{\delta x_w}+\frac{\lambda_e}{\delta x_e}-S_P\Delta x\quad a_E=-\frac{\lambda_e}{\delta x_e}\quad b=S_C\Delta x$$注意,这个式子只能用于内部控制体积,不适用于边界节点。
对于边界条件:
-
已知温度:($T(x=0)=T_a\text,~T(x=L)=T_b$)
$$a_PT_P+a_ET_E=b,~a_P=1,~a_E=0,~b=T_a\\a_WT_W+a_PT_P=b,~a_P=1,~a_W=0,~b=T_b$$ -
已知温度随空间变化的导数,描述热流边界条件:
$$(\lambda\frac{dT}{dx})_i-\left(\lambda\frac{dT}{dx}\right)_B+\bar{S}\Delta x_B=0$$
![image]() 如图,定义热通量$q_B=-\lambda \frac{dT}{dx}$。
如图,定义热通量$q_B=-\lambda \frac{dT}{dx}$。这里可以把$-\left(\lambda\frac{dT}{dx}\right)_B$这一项用$q_B$代替,于是可推出最后的线性化方程:
$$a_PT_P+a_ET_E=b,~a_P=\frac{\lambda_e}{\delta x_e}-S_p\Delta x_B,~a_E=-\frac{\lambda_e}{\delta x_e},~\mathrm{b}=S_p\Delta x_B+q_B$$
 如图,定义热通量$q_B=-\lambda \frac{dT}{dx}$。
如图,定义热通量$q_B=-\lambda \frac{dT}{dx}$。
如图,最后得到了一个三对角矩阵。每个节点只影响其左侧一个和右侧一个节点。
求解线性方程组
判断解的稳定性
-
解是否有边界?
-
边界条件是否被遵守?
-
结果如何与理论解或实验数据比较,以验证数值解的正确性?
-
残差误差:
$$R=\frac{|B-A\cdot T|}{|diag(A)\cdot T|}
$diag(A)\cdot T$是矩阵A的对角线部分与T的乘积,用于对残差进行非量纲化,使得残差大小与系统的尺度保持一致。
若R小于某个预设的容差tol,可认为解的精读是能接受的。 -
能量平衡:能量守恒必须在每个控制体中保持。有时源项$\bar{S}=0$,则控制体内的流入和流出热量$q_w - q_e = 0$。
-
网格收敛性:若网格细化,节点间距减半,误差应减少4倍。这种收敛特性在已知精确解时表现最好,通常通过对数-对数图(log-log plot)来评估收敛行为。
直接求解:高斯消元法
对如下矩阵:
$$\begin{bmatrix}a_{1,1}&a_{1,2}&a_{1,3}&...&a_{1,n}\\a_{2,1}&a_{2,2}&a_{2,3}&...&a_{2,n}\\\vdots&\vdots&\vdots&\ddots&\vdots\\a_{n,1}&a_{n,2}&a_{n,3}&...&a_{n,n}\end{bmatrix}\times\begin{bmatrix}T_1\\T_2\\\vdots\\T_n\end{bmatrix}=\begin{bmatrix}b_1\\b_2\\\vdots\\b_n\end{bmatrix}$$-
前向消元:将第i行减去第1行的某个倍数,使得$a_{i,~1}=0$,这样就能消去除了$a_{1,~1}$以外,矩阵A第1列的所有数;
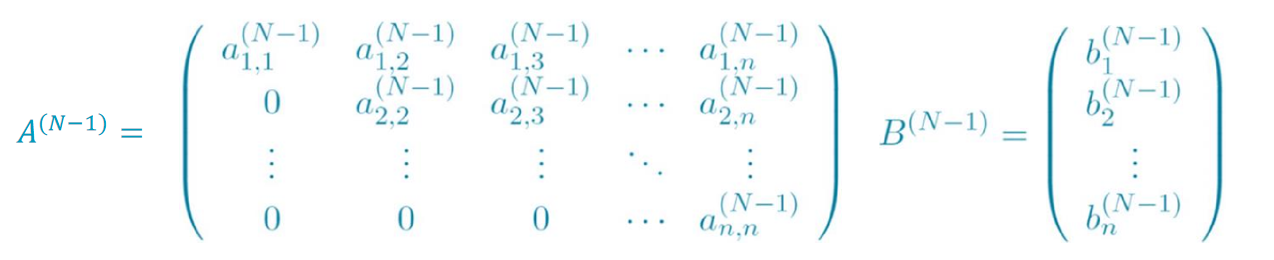
重复直到矩阵A变成上三角矩阵。
![image]()
-
回代:从最后一行开始,最后一行相当于解:
$$a_{n,~n}^{(N-1)}\cdot T_n = b_n^{(N-1)}$$倒数第2行相当于解:
$$a_{n-1,n-1}^{(N-1)}T_{n-1}+a_{n-1,n}^{(N-1)}T_n=b_{n-1}^{(N-1)}$$最后得到的通项公式为:
$$T_i=\frac{b_i^{(N-1)}-\sum_{k=i+1}^na_{i,k}^{(N-1)}T_k}{a_{i,i}^{(N-1)}}$$
迭代求解:高斯-赛德尔法
通项公式:
$$T_i^{(m)}=\frac{b_i}{a_{i,i}}-\sum_{j=1}^{i-1}\frac{a_{i,j}}{a_{i,i}}T_j^{(m)}-\sum_{j=i+1}^n\frac{a_{i,j}}{a_{i,i}}T_j^{(m-1)}\\ =\frac{1}{a_{i,~i}}(b_i-\sum_{j=1}^{i-1}a_{i,j}T_j^{(m)}-\sum_{j=i+1}^na_{i,j}T_j^{(m-1)})$$其中:
-
$T_i^{(m)}$表示第m次迭代中,第i个未知数的近似值;
-
$T_j^{(m)}$表示第m次迭代中,第j个未知数近似值,j<i时,这些值在本次迭代中已更新;
-
$T_j^{(m-1)}$表示第m次迭代中,第j个未知数近似值,j>i时,这些值在本次迭代中未更新;
-
$a_{i,~i}$:矩阵A第i行i列元素;
-
$b_i$:矩阵b第i行元素;
- $$\sum_{j=1}^{i-1}a_{i,j}T_j^{(m)}$$
这一项对在第i行中,i之前的未知数项求和(已迭代)
- $$\sum_{j=i+1}^na_{i,j}T_j^{(m-1)}$$
这一项对在第i行中,i之后的未知数项求和(未迭代)。
该法的物理意义为:通过$b_i$减掉加权求和,意为扣除已知部分,剩余未知数项的影响;除以$a_{i,~i}$则解出未知数。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号