
FPGA驱动步进电机
步进电机
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
五线四相步进电
机是从两个线圈中间引出两根线,作为公共端,因此有5根线。

五线四相步进电机一般采用8拍进行驱动。
verilog代码实现
//-------------------------------------------------------------- //功能:这是五线四相电机驱动模块,输入PWM.DIR,EN就可以控制电机的转动 //PWM:脉冲数越多电机转的角度或者圈数越多,PWM的频率越高,电机转速越快 //RST_n:低电平下降沿复位 //EN:使能信号 //M_OUT:电机控制时序输出引脚 //--------------------------------------------------------------- module motor_sig( PWM, //驱动脉冲输入,脉冲数决定转的圈数,脉冲频率决定转速 RST_n,//低复位 DIR,//方向 EN,//使能信号,1:有效 0:关闭 //五线四相电机的输出引脚 M_OUT ); input PWM,RST_n,DIR,EN; output [3:0]M_OUT;//【a,b,c,d】 reg [3:0]motor_ctl; always@(negedge RST_n or posedge PWM) begin if(!RST_n)begin motor_ctl <= 4'b0000; end else begin if(EN)begin//使能信号有效 if(DIR)begin//CCW case(motor_ctl) 4'b0000: motor_ctl <= 4'b1000; 4'b1000: motor_ctl <= 4'b1100; 4'b1100: motor_ctl <= 4'b0100; 4'b0100: motor_ctl <= 4'b0110; 4'b0110: motor_ctl <= 4'b0010; 4'b0010: motor_ctl <= 4'b0011; 4'b0011: motor_ctl <= 4'b0001; 4'b0001: motor_ctl <= 4'b1001; 4'b1001: motor_ctl <= 4'b1000; default:motor_ctl <= 4'b1000; endcase end else begin //CW case(motor_ctl) 4'b0000: motor_ctl <= 4'b1001; 4'b1001: motor_ctl <= 4'b0001; 4'b0001: motor_ctl <= 4'b0011; 4'b0011: motor_ctl <= 4'b0010; 4'b0010: motor_ctl <= 4'b0110; 4'b0110: motor_ctl <= 4'b0100; 4'b0100: motor_ctl <= 4'b1100; 4'b1100: motor_ctl <= 4'b1000; 4'b1000: motor_ctl <= 4'b1001; default:motor_ctl <= 4'b1000; endcase end end end end assign M_OUT[3:0] = motor_ctl[3:0]; endmodule
仿真结果

四线二相步进电机
这种步进电机相当于五线四相步进电机没有引出抽头。如果将五线四相步进电机引出的抽头不使用。且两个抽头没有连接在一起,可以将其作为二相电机使用。

四线二相步进电机的驱动有八拍和四拍的。
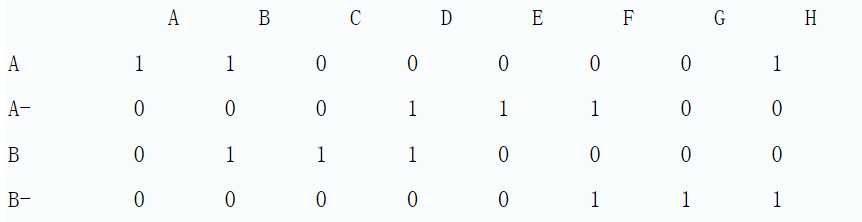
八拍驱动时序:
八个状态:1、在 A 与 A-正电压,B 与 B-不给电悬空;2、在 A 与 A-正电压,B与 B-也给正电压;3、A 与 A-不给电压悬空,B 与 B-正电压;4、A 与 A-给负电压,B与B-给正电压;5、A与A-给负电压,B 与B-不给悬空;6、A与A-给负电压,B与B-给负电压;7、A 与A-不给电悬空,B 与 B-给负电压;8、A 与给正电压,B 与 B-给负电压;按以上八个状态轮流供电,控制一下脉宽就可以了。
实现
//-------------------------------------------------------------- //功能:这是四线二相电机驱动模块,输入PWM.DIR,EN就可以控制电机的转动 //PWM:脉冲数越多电机转的角度或者圈数越多,PWM的频率越高,电机转速越快 //RST_n:低电平下降沿复位 //EN:使能信号 //M_OUT:电机控制时序输出引脚 //--------------------------------------------------------------- module motor_sig_42( PWM, //驱动脉冲输入,脉冲数决定转的圈数,脉冲频率决定转速 RST_n,//低复位 DIR,//方向 EN,//使能信号,1:有效 0:关闭 //四线二相电机的输出引脚 M_OUT ); input PWM,RST_n,DIR,EN; output [3:0]M_OUT;//【A+,A-,B+,B-】 reg [3:0]motor_ctl; always@(negedge RST_n or posedge PWM) begin if(!RST_n)begin motor_ctl <= 4'b0000; end else begin if(EN)begin//使能信号有效 if(DIR)begin//CCW case(motor_ctl) 4'b0000: motor_ctl <= 4'b1000; 4'b1000: motor_ctl <= 4'b1010; 4'b1010: motor_ctl <= 4'b0010; 4'b0010: motor_ctl <= 4'b0110; 4'b0110: motor_ctl <= 4'b0100; 4'b0100: motor_ctl <= 4'b0101; 4'b0101: motor_ctl <= 4'b0001; 4'b0001: motor_ctl <= 4'b1001; 4'b1001: motor_ctl <= 4'b1000; default:motor_ctl <= 4'b1000; endcase end else begin //CW case(motor_ctl) 4'b0000: motor_ctl <= 4'b1001; 4'b1001: motor_ctl <= 4'b0001; 4'b0001: motor_ctl <= 4'b0101; 4'b0101: motor_ctl <= 4'b0100; 4'b0100: motor_ctl <= 4'b0110; 4'b0110: motor_ctl <= 4'b0010; 4'b0010: motor_ctl <= 4'b1010; 4'b1010: motor_ctl <= 4'b1000; 4'b1000: motor_ctl <= 4'b1001; default:motor_ctl <= 4'b1000; endcase end end end end assign M_OUT[3:0] = motor_ctl[3:0]; endmodule
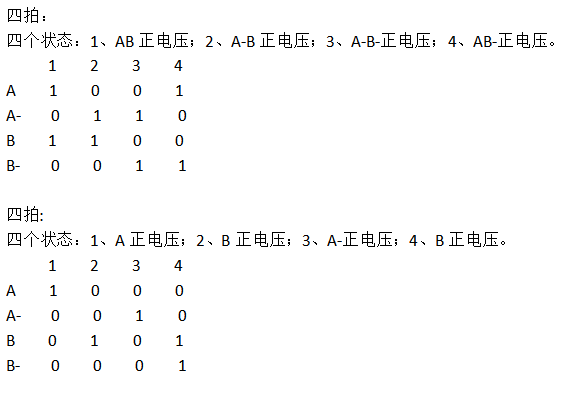
四拍驱动时序
总结
该模块可通过控制PWM信号实现电机旋转角度和旋转速度的控制,方便使用,移植方便。

