
理论物理极础之插播数学3:偏微分
 “看那边,莱尼,那边的山和山谷美吗?”
“美,乔治。等我们有钱了我们能去那里吗?可以吗?”
乔治眯起眼睛:“你说的地方具体是哪里啊,莱尼?”
莱尼用手一指:“就是那里,乔治,那个小山谷。”
“看那边,莱尼,那边的山和山谷美吗?”
“美,乔治。等我们有钱了我们能去那里吗?可以吗?”
乔治眯起眼睛:“你说的地方具体是哪里啊,莱尼?”
莱尼用手一指:“就是那里,乔治,那个小山谷。”
“看那边,莱尼,那边的山和山谷美吗?”
“美,乔治。等我们有钱了我们能去那里吗?可以吗?”
乔治眯起眼睛:“你说的地方具体是哪里啊,莱尼?”
莱尼用手一指:“就是那里,乔治,那个小山谷。”

偏导数
多变量函数微积分是单变量函数微积分的推广。考虑一个多变量函数\(V(x,y,z)\),自变量为\(x\)、\(y\)、\(z\),这里它们不一定代表是坐标。另外,自变量数目可以多于或少于3个。
多变量微分的核心概念是偏导数。我们考虑一点\((x,y,z)\)的邻域,固定\(y\)和\(z\),看看\(V\)随\(x\)的变化率。我们想象\(y\)和\(z\)不变,那函数相当于只剩一个变量\(x\)了,那么\(V\)的导数就是
\begin{equation}\frac{dV}{dx}=\lim_{\Delta x \rightarrow 0}\frac{\Delta V}{\Delta x}\label{eq:der}\end{equation}
其中\(\Delta V\)定义为
\begin{equation}\Delta V=V(x+\Delta x,y,z)-V(x,y,z)\label{eq:dV}\end{equation}
注意到,\(\Delta V\)定义中,只有\(x\)有变化,\(y\)和\(z\)都没有变化。
方程(\ref{eq:der})和(\ref{eq:dV})定义的导数称为\(V\)对\(x\)的偏导数,记为
如果我们想强调\(y\)和\(z\)不变,也可记为
同样地,我们可以定义函数对另外任何一个变量的偏导数,如对\(y\)的偏导数为:
\(V\)对\(y\)的偏导也可记为如下简化符号:
多级导数也可定义。把\(\frac{\partial V}{\partial x}\)看成\(x\)、\(y\)、\(z\)的函数,也可以对其求微分。函数\(V\)对\(x\)二阶偏导为:
还可定义混合偏导。比如,\(\partial_y V\)对\(x\)的偏导为
混合偏导一个有趣并且很重要的性质是混合偏导与求导顺序无关,即
| 练习1:求以下二元函数的一阶和二阶偏导(包括混合偏导):\(F(x,y)=x^2+y^2\)、\(F(x,y)=\sin(xy)\)、\(F(x,y)=\frac{x}{y}e^{(x^2+y^2)}\)、\(F(x,y)=e^x\cos y\) |
|---|
| (注:原文函数有误:\(x^2+y^2=\sin(xy)\)、\(\frac{x}{y}e^{x^2+y^2}\)) |
驻点和函数极值
考虑一个一元函数\(F(y)\),如图1所示。
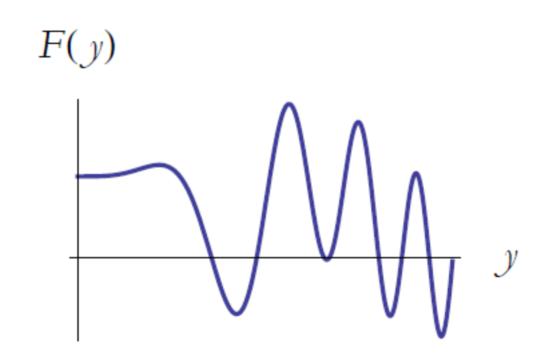
在曲线上一些地方,\(y\)往任何方向变化,都会使函数值\(F\)增大,这些地方称为极小值点,见图2中的标记,

在每个局域极小点往\(y\)的任何方向走,你都会高于点\(F(y)\)。每个点都处在一处洼地的底部。曲线上最低的极小值点称为最小值点。
函数在某点取极小值的一个条件是函数在此点对独立变量的导数为0。这是个必要条件,但不是充分条件。满足这一条件的点为驻点:
要判断是不是极小值点还需要看看驻点的性质,也即对函数求二阶导数。如果二阶导数大于0,
那么附近各点都高于驻点,此驻点为函数的极小值点。
如果函数在驻点的二阶导数小于0,
那么附近各点都低于驻点,此驻点为函数的极大值点。见图3中标注各点。

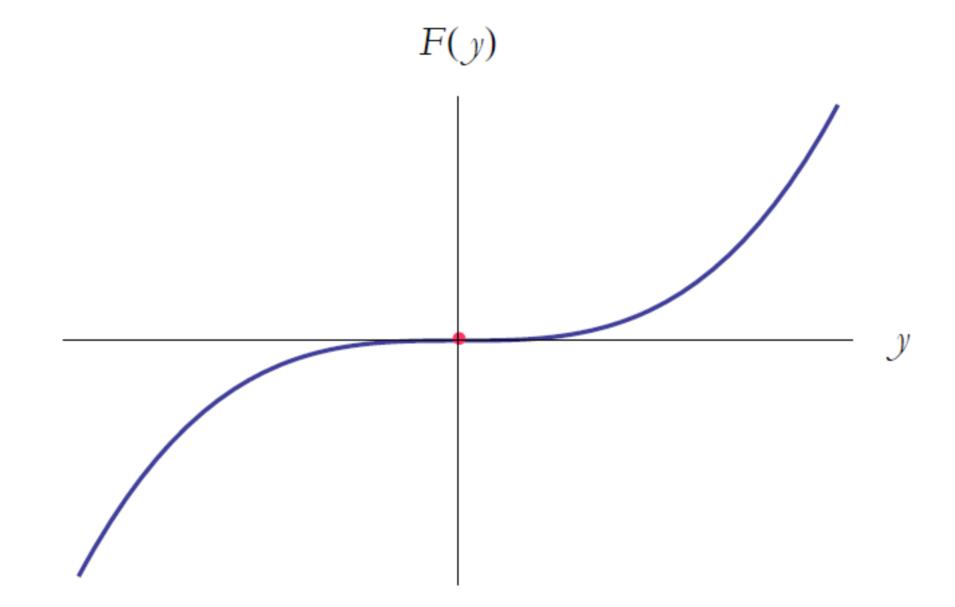
如果函数在驻点的二阶导数等于0,
函数的导数在驻点改变符号,此驻点称为函数的拐点。
图4为拐点示例。
高维驻点
多变量函数也有极小值点、极大值点和驻点。想象一片山地,海拔高度是纬度和经度的函数,把函数记为\(A(x,y)\),山峰和山谷分别为极大值点和极小值点。这些点还不是山区仅有的局部平坦的地方,还有两山之间的鞍点。见图5所示。

在山峰处,你不管往哪个方向走,你都会往低处走。在山谷处正相反,你不管往哪个方向走,你都会往高处走。但是这些地方都是平的。
还有些地方是平的。两山之间有些地方称为山鞍,鞍点也是平的。在鞍点你沿某个轴的任意方向,你的高度会上升,但是如果你沿垂直轴的任意方向走,你的高度又下降。
沿着\(x\)轴把山切开,并使刀片通过\(A\)的一个极小值点,见图6所示。

很明显,在极小值点\(A\)对\(x\)的导数为0,即
同样地,我们也可以沿\(y\)轴把山切开,于是也有
即在极小值点,或在驻点,函数对每个变量的一阶导数都为0。如果\(A\)的方向空间多于两个,在驻点\(A\)对所有方向\(x_i\)的导数都为0:
\begin{equation}\frac{\partial A}{\partial x_i}=0 \label{eq:Mstat}\end{equation}
以上方程有个简记法。当一点\(x\)变化一点点,函数值的改变量为
方程(\ref{eq:Mstat})等价于
\begin{equation}\delta A=0 \label{eq:Mstateq}\end{equation}
假设我们已经找到满足以上条件的一点,我们如何知道这一点是对应极小值点还是极大值点,抑或鞍点?我们需要看二阶导数。但是二阶导数有很多。比如对于二维的情况,我们有以下二阶导数:\(\frac{\partial^2 A}{\partial x^2}\)、\(\frac{\partial^2 A}{\partial y^2}\)、\(\frac{\partial^2 A}{\partial x \partial y}\)、\(\frac{\partial^2 A}{\partial y \partial x}\),最后两个结果相等。
这些二阶导数写在一起,组成一个矩阵,这个矩阵叫做海森矩阵:
\begin{equation*}H=\begin{pmatrix}\frac{\partial^2 A}{\partial x^2}&\frac{\partial^2 A}{\partial x \partial y}\\\frac{\partial^2 A}{\partial y^2}&\frac{\partial^2 A}{\partial y \partial x}\\ \end{pmatrix}\end{equation*}
迹为
这里不具体解释矩阵、行列式和迹这些概念。你知道有这些东西还有以下规则就可以了:
如果海森矩阵的行列式和迹都是正的,那么对应的驻点为极小值点。
如果海森矩阵的行列式是正的,迹都是负的,那么对应的驻点为极大值点。
如果海森矩阵的行列式是正的,不管迹符号为何,对应的驻点为鞍点。
这里只写出了两变量函数的具体规则。对于更多变量的函数,规则的形式更为复杂。下面我们具体算一下两变量函数。比如,考虑函数
求导,
由于\(\cos\frac{\pi}{2}=0\),显然点\((\pi/2,\pi/2)\)是一个驻点。
要知道这个点的类型,还得计算二阶导数
由于\(\sin\frac{\pi}{2}=1\),计算海森矩阵的行列式和迹,行列式和迹都大于0,所以点\((\pi/2,\pi/2)\)是个极小值点。
| 练习2:考虑以下各点\((\pi/2,-\pi/2)\)、\((-\pi/2,\pi/2)\)、\((-\pi/2,-\pi/2)\),判断这些点是不是以下函数\(F(x,y)=\sin x +\sin y\)、\(F(x,y)=\cos x\)的驻点,并判断驻点的类型。 |
|---|

 浙公网安备 33010602011771号
浙公网安备 33010602011771号