


KM算法(运用篇)
最佳匹配
什么是完美匹配
如果一个二分图,X部和Y部的顶点数相等,若存在一个匹配包含X部与Y部的所有顶点,则称为完美匹配。
换句话说:若二分图X部的每一个顶点都与Y中的一个顶点匹配,**并且**Y部中的每一个顶点也与X部中的一个顶点匹配,则该匹配为完美匹配。
什么是完备匹配
如果一个二分图,X部中的每一个顶点都与Y部中的一个顶点匹配,**或者**Y部中的每一个顶点也与X部中的一个顶点匹配,则该匹配为完备匹配。
什么是最佳匹配
带权二分图的权值最大的完备匹配称为最佳匹配。
二分图的最佳匹配不一定是二分图的最大权匹配。
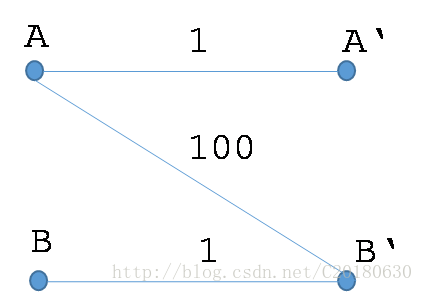
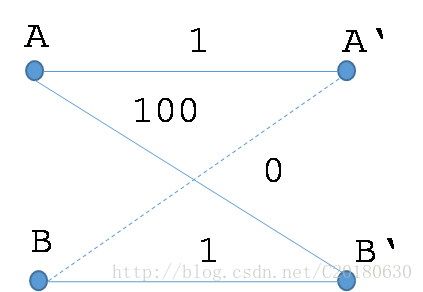
转化
可以添加一些权值为0的边,使得最佳匹配和最大权匹配统一起来。
KM算法
求二分图的最佳匹配有一个非常优秀的算法,可以做到O(N^3),这就是KM算法。该算法描述如下:
1.首先选择顶点数较少的为X部,初始时对X部的每一个顶点设置顶标,顶标的值为该点关联的最大边的权值,Y部的顶点顶标为0。
2.对于X部中的每个顶点,在相等子图中利用匈牙利算法找一条增广路径,如果没有找到,则修改顶标,扩大相等子图,继续找增广路径。当每个点都找到增广路径时,此时意味着每个点都在匹配中,即找到了二分图的完备匹配。该完备匹配即为二分图的最佳匹配。
什么是相等子图呢?因为每个顶点有一个顶标,如果我们选择边权等于两端点的顶标之和的边,它们组成的图称为相等子图。
如果从X部中的某个点Xi出发在相等子图中没有找到增广路径,我们是如何修改顶标的呢?如果我们没有找到增广路径,则我们一定找到了许多条从Xi出发并结束于X部的匹配边与未匹配边交替出现的路径,姑且称之为交错树。我们将交错树中X部的顶点顶标减去一个值d,交错树中属于Y部的顶点顶标加上一个值d。这个值后面要讲它如何计算。那么我们会发现:
-
两端都在交错树中的边(i,j),其顶标和没有变化。也就是说,它原来属于相等子图,现在仍属于相等子图。
-
两端都不在交错树中的边(i,j),其顶标也没有变化。也就是说,它原来属于(或不属于)相等子图,现在仍属于(或不属于)相等子图。
-
X端不在交错树中,Y端在交错树中的边(i,j),它的顶标和会增大。它原来不属于相等子图,现在仍不属于相等子图。
-
X端在交错树中,Y端不在交错树中的边(i,j),它的顶标和会减小。也就说,它原来不属于相等子图,现在可能进入了相等子图,因而使相等子图得到了扩大。
-
我们修改顶标的目的就是要扩大相等子图。为了保证至少有一条边进入相等子图,我们可以在交错树的边中寻找顶标和与边权之差最小的边,这就是前面说的d值。将交错树中属于X部的顶点减去d,交错树中属于Y部的顶点加上d。则可以保证至少有一条边扩充进入相等子图。
3.当X部的所有顶点都找到了增广路径后,则找到了完备匹配,此完备匹配即为最佳匹配。
相等子图的若干性质
- 在任意时刻,相等子图上的最大权匹配一定小于等于相等子图的顶标和。
- 在任意时刻,相等子图的顶标和即为所有顶点的顶标和。
- 扩充相等子图后,相等子图的顶标和将会减小。
- 当相等子图的最大匹配为原图的完备匹配时,匹配边的权值和等于所有顶点的顶标和,此匹配即为最佳匹配
以上就是KM算法的基本思路。但是朴素的实现方法,时间复杂度为O(n4)——需要找O(n)次增广路,每次增广最多需要修改O(n)次顶标,每次修改顶 标时由于要枚举边来求d值,复杂度为O(n2)。实际上KM算法的复杂度是可以做到O(n3)的。我们给每个Y顶点一个“松弛量”函数slack,每次开 始找增广路时初始化为无穷大。在寻找增广路的过程中,检查边(i,j)时,如果它不在相等子图中,则让slack[j]变成原值与 A[i]+B[j]-w[i,j]的较小值。这样,在修改顶标时,取所有不在交错树中的Y顶点的slack值中的最小值作为d值即可。但还要注意一点:修 改顶标后,要把所有不在交错树中的Y顶点的slack值都减去d
模板一,用全局变量minz表示边权和顶标最小的差值,省去slack数组
1 #include<iostream> 2 #include<cstring> 3 #include<cstdio> 4 #include<vector> 5 #include<map> 6 using namespace std; 7 typedef long long ll; 8 const int maxn = 300 + 10; 9 const int INF = 0x3f3f3f3f; 10 11 int wx[maxn], wy[maxn];//每个点的顶标值(需要根据二分图处理出来) 12 int cx[maxn], cy[maxn];//每个点所匹配的点 13 int visx[maxn], visy[maxn];//每个点是否加入增广路 14 int cntx, cnty;//分别是X和Y的点数 15 int Map[maxn][maxn];//二分图边的权值 16 int minz;//边权和顶标最小的差值 17 18 bool dfs(int u)//进入DFS的都是X部的点 19 { 20 visx[u] = 1;//标记进入增广路 21 for(int v = 1; v <= cnty; v++) 22 { 23 if(!visy[v] && Map[u][v] != INF)//如果Y部的点还没进入增广路,并且存在路径 24 { 25 int t = wx[u] + wy[v] - Map[u][v]; 26 if(t == 0)//t为0说明是相等子图 27 { 28 visy[v] = 1;//加入增广路 29 30 //如果Y部的点还未进行匹配 31 //或者已经进行了匹配,可以从原来的匹配反向找到增广路 32 //那就可以进行匹配 33 if(cy[v] == -1 || dfs(cy[v])) 34 { 35 cx[u] = v; 36 cy[v] = u;//进行匹配 37 return 1; 38 } 39 } 40 else if(t > 0)//此处t一定是大于0,因为顶标之和一定>=边权 41 { 42 minz = min(minz, t);//边权和顶标最小的差值 43 } 44 } 45 } 46 return false; 47 } 48 49 int KM() 50 { 51 memset(cx, -1, sizeof(cx)); 52 memset(cy, -1, sizeof(cy)); 53 memset(wx, 0, sizeof(wx));//wx的顶标为该点连接的边的最大权值 54 memset(wy, 0, sizeof(wy));//wy的顶标为0 55 for(int i = 1; i <= cntx; i++)//预处理出顶标值 56 { 57 for(int j = 1; j <= cnty; j++) 58 { 59 if(Map[i][j] == INF)continue; 60 wx[i] = max(wx[i], Map[i][j]); 61 } 62 } 63 for(int i = 1; i <= cntx; i++)//枚举X部的点 64 { 65 while(1) 66 { 67 minz = INF; 68 memset(visx, 0, sizeof(visx)); 69 memset(visy, 0, sizeof(visy)); 70 if(dfs(i))break;//已经匹配正确 71 72 //还未匹配,将X部的顶标减去minz,Y部的顶标加上minz 73 for(int j = 1; j <= cntx; j++) 74 if(visx[j])wx[j] -= minz; 75 for(int j = 1; j <= cnty; j++) 76 if(visy[j])wy[j] += minz; 77 } 78 } 79 80 int ans = 0;//二分图最优匹配权值 81 for(int i = 1; i <= cntx; i++) 82 if(cx[i] != -1)ans += Map[i][cx[i]]; 83 return ans; 84 } 85 int n, k; 86 int main() 87 { 88 while(scanf("%d", &n) != EOF) 89 { 90 for(int i = 1; i <= n; i++) 91 { 92 for(int j = 1; j <= n; j++) 93 scanf("%d", &Map[i][j]); 94 } 95 cntx = cnty = n; 96 printf("%d\n", KM()); 97 } 98 return 0; 99 }
模板二,用slack数组(对于完全图的优化很快)
和全局变量不同的是,全局变量在每次while循环中都需要赋值成INF,每次求出的是所有点的最小值,而slack数组在每个while外面就初始化好,每次while循环slack数组的每个值都在用到,一次增广路中求出的slack值会更准确,循环次数比全局变量更少
1 #include<iostream> 2 #include<cstring> 3 #include<cstdio> 4 #include<vector> 5 #include<map> 6 using namespace std; 7 typedef long long ll; 8 const int maxn = 300 + 10; 9 const int INF = 0x3f3f3f3f; 10 11 int wx[maxn], wy[maxn];//每个点的顶标值(需要根据二分图处理出来) 12 int cx[maxn], cy[maxn];//每个点所匹配的点 13 int visx[maxn], visy[maxn];//每个点是否加入增广路 14 int cntx, cnty;//分别是X和Y的点数 15 int Map[maxn][maxn];//二分图边的权值 16 int slack[maxn];//边权和顶标最小的差值 17 18 bool dfs(int u)//进入DFS的都是X部的点 19 { 20 visx[u] = 1;//标记进入增广路 21 for(int v = 1; v <= cnty; v++) 22 { 23 if(!visy[v] && Map[u][v] != INF)//如果Y部的点还没进入增广路,并且存在路径 24 { 25 int t = wx[u] + wy[v] - Map[u][v]; 26 if(t == 0)//t为0说明是相等子图 27 { 28 visy[v] = 1;//加入增广路 29 30 //如果Y部的点还未进行匹配 31 //或者已经进行了匹配,可以从原来的匹配反向找到增广路 32 //那就可以进行匹配 33 if(cy[v] == -1 || dfs(cy[v])) 34 { 35 cx[u] = v; 36 cy[v] = u;//进行匹配 37 return 1; 38 } 39 } 40 else if(t > 0)//此处t一定是大于0,因为顶标之和一定>=边权 41 { 42 slack[v] = min(slack[v], t); 43 //slack[v]存的是Y部的点需要变成相等子图顶标值最小增加多少 44 } 45 } 46 } 47 return false; 48 } 49 50 int KM() 51 { 52 memset(cx, -1, sizeof(cx)); 53 memset(cy, -1, sizeof(cy)); 54 memset(wx, 0, sizeof(wx));//wx的顶标为该点连接的边的最大权值 55 memset(wy, 0, sizeof(wy));//wy的顶标为0 56 for(int i = 1; i <= cntx; i++)//预处理出顶标值 57 { 58 for(int j = 1; j <= cnty; j++) 59 { 60 if(Map[i][j] == INF)continue; 61 wx[i] = max(wx[i], Map[i][j]); 62 } 63 } 64 for(int i = 1; i <= cntx; i++)//枚举X部的点 65 { 66 memset(slack, INF, sizeof(slack)); 67 while(1) 68 { 69 70 memset(visx, 0, sizeof(visx)); 71 memset(visy, 0, sizeof(visy)); 72 if(dfs(i))break;//已经匹配正确 73 74 75 int minz = INF; 76 for(int j = 1; j <= cnty; j++) 77 if(!visy[j] && minz > slack[j]) 78 //找出还没经过的点中,需要变成相等子图的最小额外增加的顶标值 79 minz = slack[j]; 80 //和全局变量不同的是,全局变量在每次while循环中都需要赋值成INF,每次求出的是所有点的最小值 81 //而slack数组在每个while外面就初始化好,每次while循环slack数组的每个值都在用到 82 //在一次增广路中求出的slack值会更准确,循环次数比全局变量更少 83 84 85 //还未匹配,将X部的顶标减去minz,Y部的顶标加上minz 86 for(int j = 1; j <= cntx; j++) 87 if(visx[j])wx[j] -= minz; 88 for(int j = 1; j <= cnty; j++) 89 //修改顶标后,要把所有不在交错树中的Y顶点的slack值都减去minz 90 if(visy[j])wy[j] += minz; 91 else slack[j] -= minz; 92 } 93 } 94 95 int ans = 0;//二分图最优匹配权值 96 for(int i = 1; i <= cntx; i++) 97 if(cx[i] != -1)ans += Map[i][cx[i]]; 98 return ans; 99 } 100 int n, k; 101 int main() 102 { 103 while(scanf("%d", &n) != EOF) 104 { 105 for(int i = 1; i <= n; i++) 106 { 107 for(int j = 1; j <= n; j++) 108 scanf("%d", &Map[i][j]); 109 } 110 cntx = cnty = n; 111 printf("%d\n", KM()); 112 } 113 return 0; 114 }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号