
CUDA并行计算框架(二)实例相关。
2011-10-10 11:25 熬夜的虫子 阅读(12778) 评论(2) 收藏 举报从这部分开始 结合虫子的demo程序给大家分析下cuda的性能与可行性。
一。先概述下实现流程。
CUDA在执行的时候是让host里面的一个一个的kernel按照线程网格(Grid)的概念在显卡硬件(GPU)上执行。每一个线程网格又可以包含多个线程块(block),每一个线程块中又可以包含多个线程(thread)。
每一个kernel交给每一个Grid来完成。当要执行这些任务的时候,每一个Grid又把任务分成一部分一部分的block,block再分线程来完成。每个Grid中的任务是一定的。二维线程块的索引关系为如下:
unsigned int xIndex = blockDim.x * blockIdx.x + threadIdx.x;
unsigned int yIndex = blockDim.y * blockIdx.y + threadIdx.y;
block中的每个线程都有自己的寄存器和local memory,block中的所有线程共享一个shared memory,一个grid共享一个global memory。
每一个时钟周期内,warp(一个block里面一起运行的thread)包含的thread数量是有限的,现在的规定是32个。一个block中含有16个warp。所以一个block中最多含有512个线程
每次Device(就是显卡)只处理一个grid。
下面说明一下硬件的执行模型。
假如出于某种原因,公司的办公室被征用了搞活动。只留下一个小房间来给开发团队。每一个时钟周期内按照wrap(就理解为运行的时候,一个block里面一起运行的thread,例如block里面有512个thread,但是每次只有32个thread在运行,那么这32个thread就是一个运行的warp组 线程束)。每一个warp里面包含的thread数量是有限的,现在的规定是32个。将来不知道会不会有变化,这个只有CUDA开发人员知道了。每次Device(就是显卡)只处理一个grid(在未来支持directX11 的硬件中这一限制可能被解除)。假如我们一个部门有x个人,办公室内有N个桌子,每张桌子可以坐32个人。然后轮流来开发….。这里的桌子可以理解成multiprocessor(多处理器)。每个sm中包含8个标量流处理器(sp)。GPU所谓的多核中核的概念就是sp的数量。Cuda中的kernel函数实质上是以block为单位执行的。同一block中需要共享数据,因此他们必须在同一个SM中发射,而block中的每一个线程则被发射到sp上去执行。 疑点:既然有这样的线程簇限制、为何还要设置高于warp线程数的线程。
二。demo
安装部署方面driver、toolkit、sdk顺序安装好。Cuda的项目支持4种调试方式release、debug、emurelease、emudubug。前2个是需要gpu真正的支持cuda后者是cpu模拟gpu。至于你的电脑能否支持cuda 可以运行下deviceQuery.exe程序
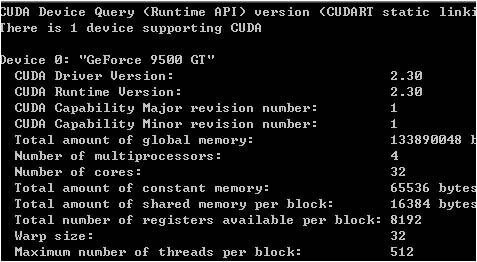
图中我们关注一下几点就可以了,首先 有一个支持cuda的设备。计算能力1,局存储器的大小,核的数量,多处理器的数量,常量存储器的大小、每个block的共享存储器的大小、wrap的线程数等等。
想看cuda在图形领域的应用可以运行这个smokeParticles.exe程序哦。
在我的demo中,cpp文件主要是处理一些cpu端的处理、cu文件通常是与gpu核函数和cuda api的一些内容。其中My_kernel封装了具体的核函数实现方法。Cudatool项目就是cuda的应用程序,CudaProviders是我连接C#与cuda之间的驱动、CudaWeb就是我们平常的web项目。CUDAWinApp这个就是一些小的功能演示。
下面介绍下cuda的函数类型限定符。
__device__ 在设备上执行、只能在设备上调用。
__global__ 用于声明内核函数、在设备上执行只能从主机端调用。
__host__ 在主机端执行,只能从主机端调用,默认。
__device__与__global__不支持递归,函数体内不能声明静态变量、参数数目不可变化,不能对device取指针。__global__与__host__不能连用。__global__只能返回空,调用__global__函数必须声明其执行配置、__global__函数的调用是异步的、__global__参数的值目前是通过共享存储器传递,总的大小不能超过256byte。
变量类型限定符分为__device__(变量存在设备端上)、__constant__(存在常数存储器空间)、__share__(block的共享存储器)、volatile关键字 当线程间数据可能互相影响变换时使用。
{
int count = 0;
int i = 0;
cudaGetDeviceCount(&count);
if(count == 0) {
fprintf(stderr, "没显卡.\n");
return false;
}
for(i = 0; i < count; i++) {
cudaDeviceProp prop;
if(cudaGetDeviceProperties(&prop, i) == cudaSuccess) {
if(prop.major >= 1) {
break;
}
}
}
if(i == count) {
fprintf(stderr, "没支持CUDA的显卡.\n");
return false;
}
cudaSetDevice(i);
printf("初始化ok.\n");
return true;
}
这个方法里面最重要是cudaGetDeviceCount和cudaGetDeviceProperties函数,这个cuda开发库的自带函数。通过这个函数我们可以判断出可用于执行的计算能力大于1.0的设备数量。
为输入数据分配显存空间。
cudaMemcpyHostToDevice);
将内存中的数据拷贝到显存中去。
这里cudaMemcpyHostToDevice从内存拷贝到显存,cudaMemcpyDeviceToHost从显存拷贝到内存,cudaMemcpyDeviceToDevice将全局存储器上的数据拷贝到同一cuda上下文的全局存储器的另一区域中去。
为输出数据分配显存空间。
{
case 1:
sum<<<1, 1, 0>>>(gpudata, result);
break;
case 3://线程
sum_Thread<<<1, THREAD_NUM, 0>>>(gpudata, result);
break;
case 4://
sum_ThreadOptimization<<<1, THREAD_NUM, 0>>>(gpudata, result);
break;
case 5://
sum_Block<<<BLOCK_NUM, THREAD_NUM, 0>>>(gpudata, result);
break;
case 6://
sum_Block_sync<<<BLOCK_NUM, THREAD_NUM, THREAD_NUM * sizeof(int)>>>(gpudata, result);
break;
}
内核函数。其中<<<>>>运算符对kernel函数完整的执行参数配置形式是<<<DG,DB,NS,S>>>.DG用于定义整个grid的维度和尺寸。Dim3类型(cuda的内置类型在定义类型为 dim3 的变量时,未指定的任何组件都将初始化为 1。)。上面的形式准确来写应该是这样。
Dim3 grid(num_blocks,1,1)
Dim3 threads(num_threads,1,1)
Sum<<<grid, threads ,mem_size>>>
dim3 DG(Dg.x,Dg.y,1)中每行有DG.x个block,实际上只有前2个不为1,每列Dg.y个block。第三维恒定为1。Db为dim3类型,用于定义每个block的维度和尺寸。Dim3 Db(Db.x,Db.y,Db.z)中每行有Db.x个线程,每列有Db.y个线程,高度为db.z。参数ns是一个可选参数,用于设置每个block除了静态分配的shared memory以外,最多能够分配的shared memory大小,参数s是一个cudastream_t类型的可选参数,默认为0。
#define THREAD_NUM 256
#define BLOCK_NUM 32
{
int sum = 0;
int i;
for(i = 0; i < DATA_SIZE; i++) {
sum += num[i] + num[i] + num[i] + num[i] + num[i] + num[i]+ num[i] + num[i] + num[i] + num[i] + num[i] + num[i];
}
*result = sum;
}
这个内核函数很简单,因为是单线程,将显存中的数据每个元素加10遍返回结果。
{
const int tid = threadIdx.x;
const int size = DATA_SIZE / THREAD_NUM;
int sum = 0;
int i;
for(i = tid * size; i < (tid + 1) * size; i++) {
sum += num[i] + num[i] + num[i] + num[i] + num[i] + num[i]+ num[i] + num[i] + num[i] + num[i] + num[i] + num[i];
}
result[tid] = sum;
}
这个是个单block多线程的内核函数,大家看下里面的区别。按照线程数量,每个线程处理对应地址的数据,最后汇总,这里每个线程所分配的资源都是线性的.
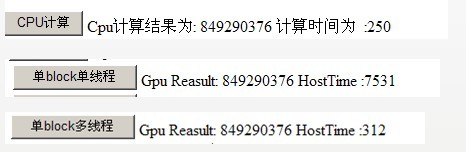
下面我们来比较下目前这3个方法的准确性已经性能差异。
在 CUDA 中,一般的数据复制到的显卡内存的部份,称为 global memory。这些内存是没有 cache 的,而且,存取 global memory 所需要的时间是非常长的,通常是数百个 cycles。由于我们的程序只有一个 thread,所以每次它读取 global memory 的内容,就要等到实际读取到数据、累加到 sum 之后,才能进行下一步。这就是为什么它的表现会这么的差。
权权上次也说了 如果cpu来用多线程来做效率会怎么样。这边做下说明,在低数量级的运算中 cpu确实会比gpu高的,应该按照综合性能来说cpu还是要比gpu强。但是对于高数量级的运算,根据cpu和gpu的结构来看,2者的差异还是相当大的。而且对于在gpu并行计算的规则和方法 cuda是提供一套成品的框架,如果用cpu的话,期待微软在.net 4.0中提出的并行计算的概念吧。
下面我们继续深入如何在并行计算中优化自己的方案。
就拿上面的单block多线程来说,有大量的 threads 在同时执行,那么当一个 thread 读取内存,开始等待结果的时候,GPU 就可以立刻切换到下一个 thread,并读取下一个内存位置。因此,理想上当 thread 的数目够多的时候,就可以完全把 global memory 的巨大 latency 隐藏起来了。
前面的程序,虽然看起来是连续存取内存位置(每个 thread 对一块连续的数字计算),但是我们要考虑到实际上 thread 的执行方式。前面提过,当一个 thread 在等待内存的数据时,GPU 会切换到下一个 thread。也就是说,实际上执行的顺序是类似
thread 0 -> thread 1 -> thread 2 -> ...
所以我们应该这样设计,让 thread 0 读取第一个数字,thread 1 读取第二个数字…依此类推。下面就是我们的第一个优化方案。
{
const int tid = threadIdx.x;
int sum = 0;
int i;
for(i = tid; i < DATA_SIZE; i += THREAD_NUM) {
sum += num[i] + num[i] + num[i] + num[i] + num[i] + num[i]+ num[i] + num[i] + num[i] + num[i] + num[i] + num[i];
}
result[tid] = sum;
}
然后我们看下效率
![]()
然后我们看下gpu更强大的运算能力,多block运算。
)
{
const int tid = threadIdx.x;
const int bid = blockIdx.x;
int sum = 0;
int i;
for(i = bid * THREAD_NUM + tid; i < DATA_SIZE;
i += BLOCK_NUM * THREAD_NUM) {
sum += num[i] + num[i] + num[i] + num[i] + num[i] + num[i]+ num[i] + num[i] + num[i] + num[i] + num[i] + num[i];
}
result[bid * THREAD_NUM + tid] = sum;
}
其实就是算法上由一维变成了二维。但是在回拷内存的时候差异要比较一下。
这个是单线程的。
{
int sum3;
cudaMemcpy(&sum3, result, sizeof(int), cudaMemcpyDeviceToHost);
sprintf(s2,"%d",sum3);
}
这个是多线程的。
{
int sum[THREAD_NUM];
cudaMemcpy(&sum, result, sizeof(int) * THREAD_NUM,
cudaMemcpyDeviceToHost);
int final_sum = 0;
for(int i = 0; i < THREAD_NUM; i++) {
final_sum += sum[i];
}
sprintf(s2,"%d",final_sum);
}
这个是多block的。
{
int sum_block[THREAD_NUM * BLOCK_NUM];
cudaMemcpy(&sum_block, result, sizeof(int) * THREAD_NUM * BLOCK_NUM,
cudaMemcpyDeviceToHost);
int final_sum = 0;
for(int i = 0; i < THREAD_NUM * BLOCK_NUM; i++) {
final_sum += sum_block[i];
}
sprintf(s2,"%d",final_sum);
}
下面我们重点看下优化方案。
前面提过,一个 block 内的 thread 可以有共享的内存,也可以进行同步。我们可以利用这一点,让每个 block 内的所有 thread 把自己计算的结果加总起来。
{
extern __shared__ int shared[];
const int tid = threadIdx.x;
const int bid = blockIdx.x;
int i;
shared[tid] = 0;
for(i = bid * THREAD_NUM + tid; i < DATA_SIZE;
i += BLOCK_NUM * THREAD_NUM) {
shared[tid] += num[i] + num[i] + num[i] + num[i] + num[i] + num[i]+ num[i] + num[i] + num[i] + num[i] + num[i] + num[i];
}
__syncthreads();
if(tid == 0) {
for(i = 1; i < THREAD_NUM; i++) {
shared[0] += shared[i];
}
result[bid] = shared[0];
}
}
利用 __shared__ 声明的变量表示这是 shared memory,是一个 block 中每个 thread 都共享的内存。它会使用在 GPU 上的内存,所以存取的速度相当快,不需要担心 latency 的问题。
__syncthreads() 是一个 CUDA 的内部函数,表示 block 中所有的 thread 都要同步到这个点,才能继续执行。

--- ---!已经相当牛了。
这样的话 在cpu回拷那块只需要block数目的数据就可以了。
{
int sum_sync[BLOCK_NUM];
cudaMemcpy(&sum_sync, result, sizeof(int) * BLOCK_NUM,
cudaMemcpyDeviceToHost);
int final_sum = 0;
for(int i = 0; i < BLOCK_NUM; i++) {
final_sum += sum_sync[i];
}
sprintf(s2,"%d",final_sum);
}
 |
原创作品允许转载,转载时请务必以超链接形式标明文章原始出处以及作者信息。 作者:熬夜的虫子 点击查看:博文索引 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号